1
Изобретение относится к электрическим микромашинам малой мощности и может быть иснользовано в системах автоматики.
Известны бесконтактные тахогенераторы БТИТ ностоянного тока, содержащие ротор в виде иостоянного магнита и статор с многофазной обмоткой. В магнитопроводе статора расположены с равномерным щагом датчики Холла, число которых определяется числом фаз обмотки статора. Датчики Холла подключены к обмотке статора. Выходные электроды датчиков Холла соединены между собой последовательно и образуют сигнальную цепь. Однако известный тахогенератор имеет сложную схему и низкую надежность из-за наличия большого количества паек при соединении электродов датчика Холла с обмоткой статора.
Описываемый тахогенератор отличается тем, что один из выводов каждой фазы обмотки соединен последовательно с одним из питающих электродов соответствующего датчика Холла, вторые питающие электроды датчиков Холла соединены в общую точку. Вторые выводы всех фаз обмотки соединены накоротко, а ось каждой фазы обмотки, соединенной с соответствующим датчиком Холла, сдвинута на 90 электрических градусов относительно этого датчика. Это упрощает схему тахогенератора и новыщает его надежность.
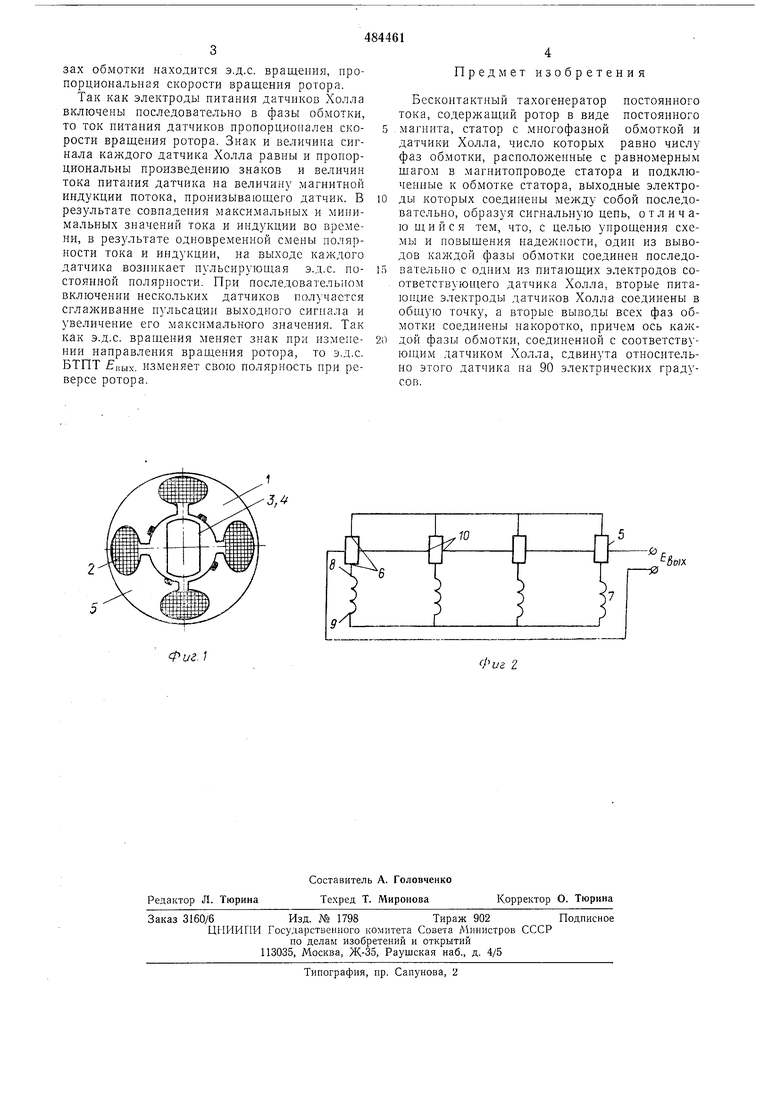
Иа фиг. 1 изображен описываемый тахогенератор, поперечное сечение; на фиг. 2 - схема включения фаз обмотки БТПТ с датчиками Холла.
Бесконтактный тахогенератор постоянного тока состоит из статора 1 с многофазной обмоткой 2 и ротора 3, полюса которого образованы постоянными магнитами 4. Иа статоре
в зоне магнитного потока ротора располол ены с постоянным шагом датчики 5 Холла, число которых совпадает с числом фаз обмотки статора. В цепь фаз 6 статора последовательно включены электроды питания 7 датчиков.
Иачала 8 фаз через цепь питания датчика Холла соединены в одну точку. Концы 9 фаз соединены накоротко, выходные электроды 10 датчиков соединены последовательно, и BI Iводы этого соединения образуют сигнальную
пень БТПТ с выходной э.д.с. (вых.). Каждая фаза соединена с датчиком Холла, смещенным относительно ее оси на 90 электрических градусов. В результате, ось полюса ротора пересекает
датчик Холла в момент, когда в фазе наводится максимальная э.д.с. вращения. При неподвижном роторе э.д.с. вращения в фазах БТПТ отсутствует, ток питания датчиков Холла равен нулю, э.д.с. Холла в датчиках
тоже равна нулю. При вращении ротора в фазах обмотки находится э.д.с. вращения, пропорциональная скорости вращения ротора.
Так как электроды питания датчиков Холла включены последовательно в фазы обмотки, то ток питания датчиков пронорциопален скорости вращения ротора. Зиак и величина сигнала каждого датчика Холла равны и пропорциональны произведению знаков и величин тока питания датчика на величину магнитной индукции потока, пронизывающего датчик. В результате совпадения максимальных и минимальных значений тока и индукции во времени, в результате одновременной смены полярности тока и индукции, на выходе каждого датчика возникает пульсирующая э.д.с. постоянной полярности. При последовательном включении нескольких датчиков получается сглал ивание нульсации выходного сигнала и увеличение его максимального значения. Так как э.д.с. вращения меняет знак при нзмепении направления вращения ротора, то э.д.с. БТПТ вых. изменяет свою полярность при реверсе ротора.
Предмет изобретения
Бесконтактный тахогенератор постоянного тока, содержащий ротор в виде постоянного магнита, статор с многофазной обмоткой и датчики Холла, число которых равно числу фаз обмотки, расположенные с равномерным щагом в магнитопроводе статора и подключенные к обмотке статора, выходные электроды которых соединены между собой последовательно, образуя сигнальную цеиь, отличаю щийся тем, что, с целью упрощения схемы и повыщения надежности, один из выводов каждой фазы обмотки соединен последовательно с одним из питающих электродов соответствующего датчика Холла, вторые питающие электроды датчиков Холла соединены в общую точку, а вторые выводы всех фаз обмотки соединены накоротко, причем ось каждои фазы обмотки, соединенной с соответствующим датчиком Холла, сдвинута относительно этого датчика на 90 электрических градусов.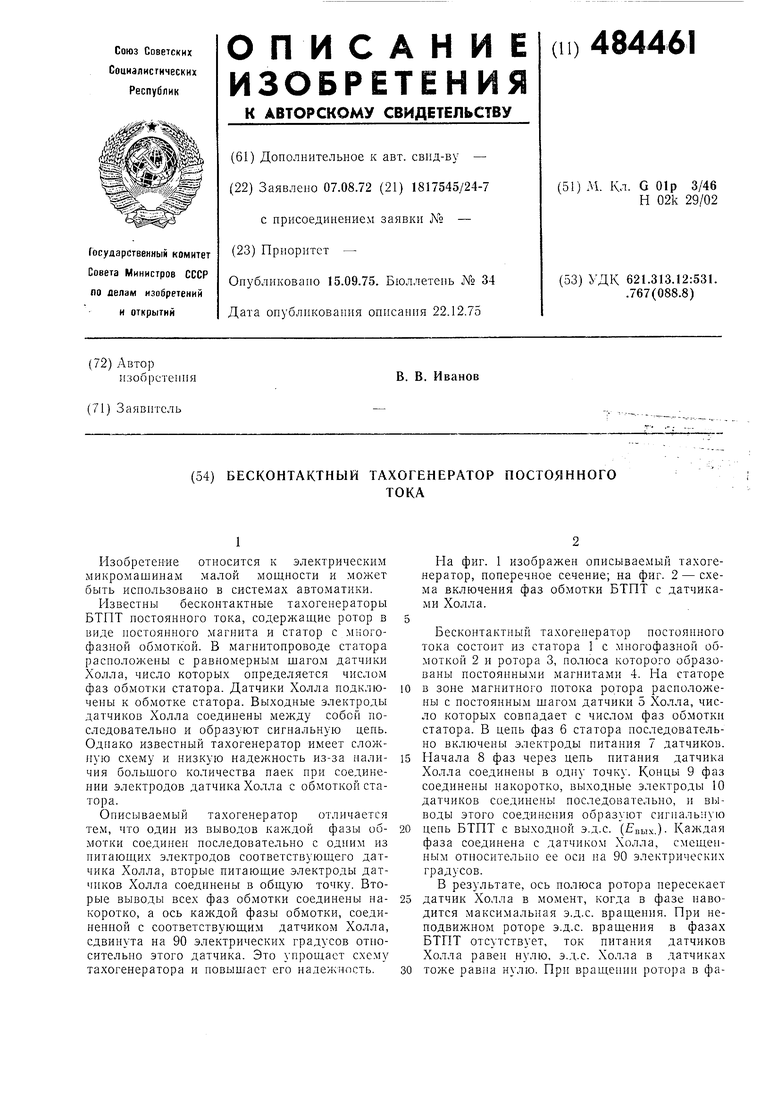
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный бесконтактный тахогенератор постоянного тока | 1980 |
|
SU1775670A1 |
| Электромеханический преобразователь бесконтактного тахогенератора постоянного тока | 1989 |
|
SU1767634A1 |
| Многофазный мотор-генератор с магнитным ротором | 2015 |
|
RU2609524C1 |
| Вентильный электродвигатель | 1980 |
|
SU972634A1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006143C1 |
| ЭЛЕКТРОПРИВОДНОЙ МОДУЛЬ | 2012 |
|
RU2592264C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2441308C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| Тахогенератор | 1960 |
|
SU134919A1 |
Фиг. /
Фиг 2
