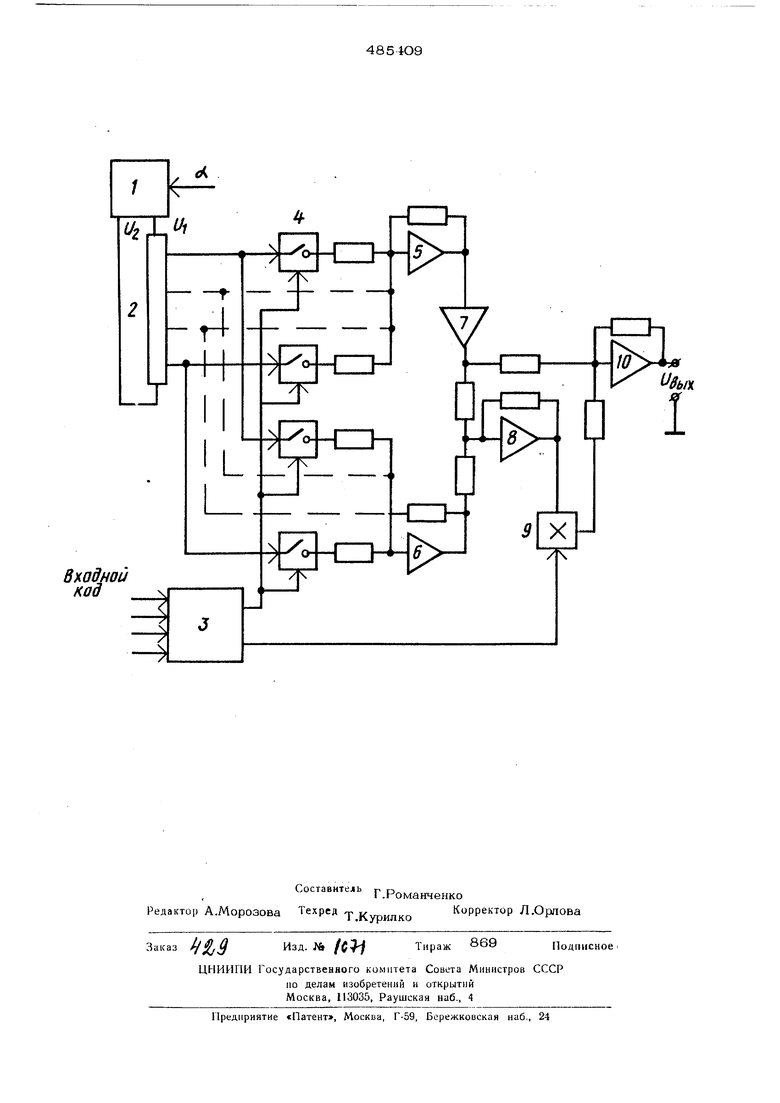
Датчик 1 обратной связи привода, ме нически связанный с осью исполнительн механизма, может быть реализован на люб известном физическом принципе действия должен вырабатывать два амплитудо-мод лированных напряжения U . и U, сд нутых друг относительно друга на посто ный угол Of . Если в качестве датчик 1 использован СКВТ, то напряжения ( и будут иметь вид: и, UmQ,itSLaO( Sin cot l(im(L)iSin| + Jo Si1lii)(isin I5Г где: lY - . Я С( - угол поворота вала исполнительног механизма (выходная координата). Напряжения U и U датчика 1 алгебраически суммируются на линейном потенциометре 2, имеющем И выходов. Величина напряжения на выходе потенциометра 2 относительно земляной точ ки схемы определяется выражением: U-U,-(U2-U,)-X,(1) Xj- -п- - коэффициент, определяю щий положение t- ГО выхода потенциометра 2; - - величина сопротивления участка потенциометра 2, заключенного между точкой подключения напря жения и. и L-h выходом; R.. - величина общего сопротивления потенциометра 2, Подставив в уравнение 1 вместо U и и их значения, получим: ГКм «t J -Ц 1}51пш1 где: А (я)- амплитуда напряжения на |-м выходе. Из уравнения 2 получить зависимость между коэффициентом Лj t-ro выхода потенциометра 2 и выходной координатой, Of , удовлетворяющую условию равенства нулю амплитудыА( - ). osa 1-Ffa) Sind (в общем случае F(o() может быть: ) г - Так как функции COS CC U Sifi tf являются монотонными, то функция J(d) является однозначной, т, е. каждому коэффициенту X , определяющему положение L-CQ выхода потенциометра 2, соответствует одно строго определенное положение выходной координаты 0( , при котором амплитуда напряжения на i-M выходе потенциометра 2 обращается в нуль. При любом отклонении выходной координаты от этого положения напряжение на (f-hi выходе потенциометра 2 будет изменяться как по амплитуде, так и по знаку и может быть использовано как аналоговый сигнал рассогласования относительно заданного значения выходной координаты а . Для упрощения схемы количество выходов потенциометра 2 взято равным: Л- N+-J. где: N Я -количес-тво. используемых старших разрядов входного кода. Формирование сигнала .рассогласования, позволяющего устанавливать нсполнительяый механизм в положения, которым соответствуют значения X;- , находя- о щиеся между соседними выходами потенциометра 2, осуществляется с помощью усилителей 7, 8, 10 и блока 9 умножения, ynpitBляемого младшими разрядами кода. Формирование сигнала рассогласования предлагаемым устройством происходит следующим образом. Выходы потенциометра 2 через управляемые ключи 4 соединяются со входами масштабных усилителей 5 л 6. Входной код поступает на блок 3 управления, который в соответствии с состоянием старших разрядов кода вырабатывает сигналы управления ключами 4, а в соответствии с состоянием младших разрядов - сигшалы управления блоком 9 умножения. Каждому состоянию старших разрядов кода соответствует подключение посредством клиочей 4 каких-либо двух соседних выходов потенциометра 2 на входы масипабных усилителей 5 и 6, причем напряжение каждого выхода потенциометра 2 передается на выход усиителей 5 и 6 со своим масштабным коэсН --иентом. На усилителе 8 осуществляется олучение разности выходных напряжений асштабных усилителей 5 и 6, а в блоке умножения эта разность умножается на оэффициент, пропорциональный состоянию ладших разрядов кода. Выходное напряение блока 9 суммируется на усилителе 0с выходным напряжением инвертора 7 и на выходе усилителя 1О получается напряжение, представляющее аналоговый сигнал рассогласования, который может быть использован для управления положением ис полнительного механизма привода. Результат отработки приводом сигнала рассогласования не зависит от формы и стабильности выходных напряжений датчика 1, поскольку из уравнения 3 известно, что коэффициент , определяющий положение М -го выхода потенциометра 2 а следовательно иП -е угловое положение выходной оси привода, определяется не абсолютными значениямифункций А (О ) иА (Q-hQjj), а их отношением. Предмет изобретения Устройство для формирования аналогсеого сигнала рассогласования в цифровом следящам приводе, содержащее датчик обратной связи привода, например синусно-косинусный вращающийся трансформатор, о т л ичающееся тем, что, с повышения точности, и помехоустойчивости Забиты устройства, оно содержит потенииомитр с It выходами, выводы KOTOpuiX) соединены с двумя выходами датчика скэратной связи, блок управления на выходи устройства, 2 Л ключей, соединенных с резисторами, два масштабных усилителя, инвертор, подключенный к выходу первого масштабного усилителя, вычитающий усилитель, входы которого связаны с инверч-ором и вторым масштабным усилителем, блик, умножения, первый вход которого соединен (выходом вычитающего уси7П1теля, а вторий - с выходом младших разрядов блока yniirihления и суммирующий усилитель, входы которого подключены к выходу инвертора и блока умножения, причем входы каждсяо масштабного усилителя Ч(.фез ,М резисторов и ключей связаны с ,:ft выходами потенциометра, а управляющие входы ключей соединены с соответствующими выход.-ми старших разрядов блока управления.
Вкаднои код
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Способ измерения угла поворота вала | 1990 |
|
SU1771069A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1311026A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1640816A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1197080A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478332A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1283968A1 |