Изобретение относится к накоплению информации, а именно к устройствам для позиционирования магнитных головок записи-воспроизведения.
Целью изобретения является повышение точности позиционирования.
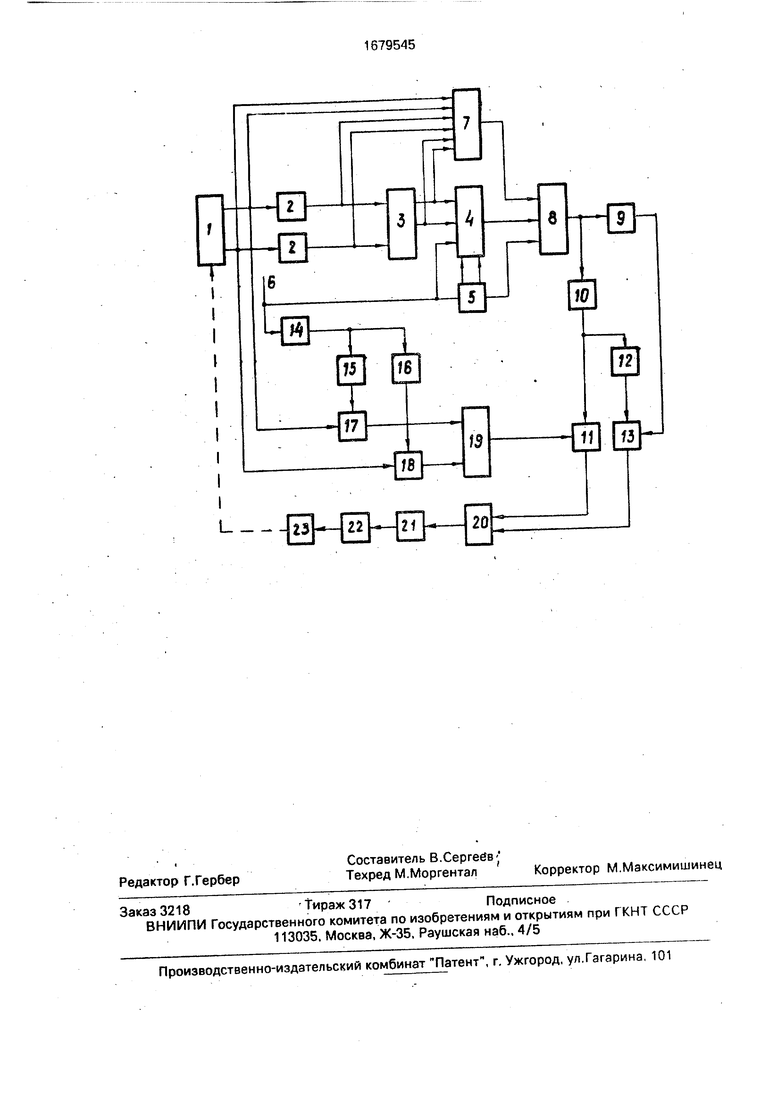
На чертеже приведена схема устройства.
Устройство содержит интерферометри- ческий датчик 1 перемещения каретки, подключенный первым и вторым выходами через усилители-ограничители 2 к первому и второму входам блока 3 определения направления перемещения, первый и второй выходы которого соединены соответственно с первым (суммирующим) и вторым (вычитающим) входами реверсивного счетчика
4. Вход вычислителя 5 соедиен с входной шиной 6 управления и третьими входами реверсивного счетчика 4. Первый и второй выходы вычислителя 5 соединены соответственно с четвертым и пятым входами реверсивного счетчика 4. Первый и второй выходы датчика 1 подключены к первому и второму входам блока 7 формирования линейной функции действительной координаты каретки, выходы усилителей- .ограничителей 2 подключены к третьему IH четвертому входам блока 7 формирования 7 линейной фунции. действительной коор- i- динаты каретки, пятый и шестой входы которого подключены к первому и второму выходам блока 3 определения нах| Ю СП 4 СЛ
правления перемещения, Разрядные выходы блока 7 формирования линейной функции действительной координаты каретки соединены с первыми входами суммирующего блока 8, разрядные выходы реверсивного счетчика 4 соединены с вторыми входами суммирующего блока 8, разрядные выходы вычислителя 5 соединены с третьими входами суммирующего блока 8. Разряд- ные выходы суммирующего блока 8 подключены к входам цифроаналогового преобразователя 9 и к разрядным входам дешифратора 10, выход которого подключен к управляющему входу аналогового ключа 11 и через инвертор 12 подключен к управляющему входу аналогового ключа 13, вход которого соединен с выходом цифроаналогового преобразователя 9. Разрядные входы делителя 14 подключены к входной шине 6, а разрядные выходы соединены соответственно с разрядными входами постоянных запоминающих устройств (ПЗУ) 15 и 16, разрядные выходы которых подключены к управляющим входам цифровых аттенюаторов 17 и 18, входы которых подключены соответственно к выходам ин- терферометрического датчика 1, а выходы - к входам суммирующего усилителя 19, выход которого подключен к входу аналогового ключа 11. Выход аналогового ключа и выход аналогового ключа 13 подключены к входу усилителя 20, выход которого соеди- внен с входом усилителя 21 мощности, выход которого подключен к управляющему входу линейного двигателя 22, кинематически связанного с кареткой 23, на которой закреплены головки записи воспроизведения (не показаны) и подвижная часть интерфе- рометрического датчика 1 перемещения каретки.
Фотоприемники (не показаны) интер- ферометрического датчика 1 смещены друг относительно друга на четверть периода пространственной интерференционной волны. Периоды этих сигналов соответствуют величине смещения каретки 23 на половину длины волны оптического излучения лазерного источника, т.е. на А/2. При перемещении каретки 23 фотоприемники датчика 1 выдают электрические сигналы Ui иКа, связанные с текущей координатой 5 каретки
23 следующими зависимостями:
с Lh Umi sin 4ЛГ-Д-;
s
1)2 Um2 COS 4JT-Ј
где Ui, U2 - амплитудные значения сигналов датчика 1,
Я-длина волны оптического излучения лазера интерферометрического датчика 1;
S - текущая линейная координата положения каретки.
Блок 7 формирования линейной функции действительной координаты каретки 23 предназначен для формирования кодового сигнала, линеаризирующего сигнал действительной координаты каретки в пределах четверти периода датчика 1 перемещения (в
п пределах отрезка к ) по закону:
Кдд К (S - -д-),
где К - коэффициент пропорциональности; S - действительная коЪрдината карет- 5 ки;
m - целое число отрезков в координате; А - волны оптического излучения лазера датчика 1.
Устройство работает следующим обра- 0 зом.
По входной шине 6 управления на реверсивный счетчик 4, вычислитель 5 и делитель 14 поступает управляющий сигнал, задающий координату позиционирования 5 каретки 23 в виде кода координаты. На выходе вычислителя 5 формируются младшие разряды сигнала, задающего движение каретки в пределах отрезка -& с дискретно0
5
кодовым сигналом с дискретностью
стью шага . На выходе счетчика 4 о
формируются старшие разряды кода управления, младший разряд которого соответствует изменению координаты на величину
8
Суммирующий блок 8 предназначен для формирования цифрового разностного сигнала между кодовым сигналом, задающим 0 координату позиционирования каретки 23;и
А 8
от блока 7 действительного положения каретки путем суммирования управляющего 5 сигнала задаваемой координаты каретки 23 и сигнала ее действительной координаты. На выходе блока 8 формируется полный цифровой разностный сигнал с дискретноСТ&Ю -& поступающий на вход цифроаQ налогового преобразователя 9 и на вход дешифратора 10.
Дешифратор 10 предназначен для формирования сигнала определения нахожде5 ния каретки в зоне ± - (четверти периода
VО
сигнала датчика 1 перемещения) от заданной координаты по поступающим кодам от блока 8.
При нахождении каретки в зоне ± к о
от заданной координаты сигнал на выходе дешифратора 10 отсутствует, поэтому сигнал с выходы инвертора 12 поступает на 5 управляющий вход аналогового ключа 13 и открывает его. На вход усилителя 20 через ключ 13 поступает сигнал с выхода преобразователя 9. Выходной сигнал усилителя 20 через усилитель 21 мощности поступает на 10 линейный двигатель 22, который смещает каретку 23, на которой закреплены головки записи-воспроизведения и подвижная часть датчика 1 перемещения.
При перемещении каретки 23 интерфе- 15 рометрический датчик 1 перемещения каретки формирует сигналы в виде сдвинутых по фазе (на четверть периода) напряжений. Периоды этих синусоидальных сигналов соответствуют величине смещения каретки 23 20 на половину длины волны оптического излучения.т.е. на - . Сигналы датчика 1 преобразуются усилителями-ограничителями 2 в двухполупериодные знаковые сигналы, не- 25 сущие информацию о полярности. Блок 3 определения перемещения в моменты смены уровней знаковых сигналов формирует импульсы, соответствующие смещению каретки 23, характеризующие действительное 30 прямое или обратное перемещение каретки
23 с периодом смещения каретки на величину Q- , поступающие на соответствующие о
входы реверсивного счетчика 4. В реверсив- 35 ном счетчике 4 осуществляется вычитание сигналов задаваемого и действительного движения каретки от блока 3, в результате чего на выходе счетчика 4 формируются . старшие разряды разностного кода управ- 40 ления, младший разряд которого соответствует изменению координаты на т .
Младшие разряды сигнала действительной координаты при перемещении ка- 45 ретки формируются в блоке 7.
В результате на входы суммирующего блока 8 поступают следующие сигналы : на первый младшие разряды кодового сигнала действительной координаты с дискретно- 50
от блока 7 формирования лиЯ п-П
стью о
нейной функции действительной координаты каретки 23; на второй младшие разряды кодового сигнала задаваемой координаты с дискретностью -п от вычислителя 5 и на третий разностный сигнал между старшими разрядами кодовых сигналов задаваемой и действительной коорди55
наты с дискретностью н от реверсивного
счетчика 4. На выходе блока 8 формируется полный управляющий кодовый сигнал с дискретностью к , поступающий на вход
цифроаналогового преобразователя 9 и на вход дешифратора 10.
При достижении кареткой зоны m
о
заданной координаты с выхода дешифратора 10 поступает сигнал на управляющий вход аналогового ключа 11 и через инвертор 12 на управляющий вход аналогового ключа 13. Аналоговый ключ 13 закрывается и снимает сигнал цифроаналогового преобразователя 9 с входа усилителя 20. Аналоговый ключ 11 открывается и подключает на вход усилителя 20 сигнал суммирующего теля 19
SЯ
U Um Sln(4 Л -Ј + p)Um(cOS (p n 4 5Tj +
с
+sfn у cos 4 тг-т ),
где Um - амплитудное значение сигнала;
р-фаза сигнала поотношению сигнала датчика 1 перемещения.
Сигнал U формируется от постугзющмх сигналов Us и Ш с выходов цифровых аттенюаторов 17 и 18
SS
Уз sin 4 л,-т Ai sin 4 „тт- ;
сс
U4 sin (pcos 4 Аз cos 4Л4
Лл
Амплитудным значениям Ai, A2 соответствуют предварительно записанные в ПЗУ 15 и 16 коды, формирующие сигналы Us и U4 цифровыми аттенюаторами от сигналов датчика 1 перемещения по закону At cos p ; А2 sin p .
Кодами, записанными в ПЗУ 15 и 16, управляют коды на выходе делителя 14, соответствующие каждой заданной координате по отношению к периоду сигнала датчика 1 перемещения по закону
N p- К-Р + П1,
где п - число дискретов, соответстеующее заданной координате (позиции);
Р - число дискретов в периоде сигнала;
К - количество полных периодов сигнала датчика перемещения;
m - число дискретов, соответствующее заданной координате в периоде сигнала датчика 1 перемещения.
Фаза сигнала, соответствующая заданной позиции (координате)
Рm 2л
Сигнал U Dm (4 я j ) с выхода
усилителя 20 поступает через усилитель 21 мощности на линейный двигатель 22 и смещает каретку 23 до тех пор, пока сигнал на выходе усилителей 19-21 не станет равным нулю. Таким образом, обеспечивается установка каретки 23 в заданную координату.
Подключение сформированного сигнала позиционирования по сигналам датчика перемещения в цепь управления линейным двигателем уменьшает погрешность позиционирования в пределах шага квантования не менее 2,7 раза и повышает надежность слежения за установленной позицией головок записи-воспроизведения.
Формула изобретения Устройство для позиционирования магнитных головок записи-воспроизведения, содержащее интерферометрический датчик перемещения каретки, выходы которого через усилители-формиро ватели подключены к входам блока определения направления перемещения, подключенного выходами к первому и второму входам реверсивного счетчика, третьим входом подсоединенного к шине управления, присоединенной к входу вычислителя, первый выход которого и выход реверсивного счетчика подключены соответственно к первому и второму входам суммирующего блока, второй и третий выходы вычислителя подключены к четвертому и пятому входам реверсивного счетчика, а выход суммирующего блока подключен к входу цифроаналогового преобразователя, первый и второй аналоговые ключи, выходы которых подключены к входам усилителя, соединенного через усилитель мощности с
управляющим входом линейного электродвигателя, кинематически связанного с кареткой, на которой закреплены головки записи- воспроизведения и подвижная
часть интерферометрического датчика, блок формирования линейной функции действительной координаты каретки, первый и второй входы которого подключены к выходам интерферометрического датчика перемещения, третий и четвёртый входы подключены к выходам усилителей-формирователей, пятый и шестой входы подключены к выходам блока определения направления перемещения, а выход - « третьему входу суммирующего блока, отличающееся тем, что, с целью повышения точности позиционирования, в него введены дешифратор, инвертор, делитель, первое и второе постоянные запоминающие устройства (ПЗУ), первый и
второй цифровые аттенюаторы и суммирующий усилитель, причем разрядные входы де- шифратора соединены с разрядными выходами суммирующего блока, выход дешифратора подключен к управляющему
входу первого аналогового ключа и чер$з инвертор соединен с управляющим входом второго аналогового ключа, вход которого подключен к выходу цифроаналогового преобразователя, разрядные входы делителя
подключены к шине управления, а разрядные выходы -к разрядным входам первого и второго постоянного запоминающего устройства ПЗУ, разрядные выходы которых подключены к управляющим входам первого и второго цифровых аттенюаторов, входы которых подключены к соответствующим выходам интерферометрического датчика, а выходы - к входам суммирующего усилителя, выход которого подключен к входу первого аналогового ключа.
L

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования головок записи-воспроизведения | 1982 |
|
SU1068995A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1988 |
|
SU1550576A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1983 |
|
SU1167653A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1987 |
|
SU1446653A1 |
| Устройство координатного позиционирования | 1989 |
|
SU1695264A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| МОЩНЫЙ ИМПУЛЬСНО-ПЕРИОДИЧЕСКИЙ ЛАЗЕР С НЕУСТОЙЧИВЫМ РЕЗОНАТОРОМ | 1985 |
|
SU1839868A1 |
| Устройство управления позиционером | 1990 |
|
SU1739386A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
Изобретение относится к накоплению информации, а именно к устройствам для позиционирования магнитных головок записи-воспроизведения, и позволяет повысить точность позиционирования. Это достигается введением дешифратора, инвертора, делителя, первого и второго постоянных запоминающих устройств (ПЗУ), первого и второго цифровых аттенюаторов и суммирующего усилителя. Причем разрядные входы дешифратора соединены с разрядными выходами суммирующего блока, выход дешифратора подключен к управляющему входу первого аналогового ключа и через инвертор соединен с управляющим входом второго аналогового ключа, вход которого подключен к выходу цифроаналого- эвого преобразователя, разрядные входы делителя подключены к шине управления, а разрядные выходы - к разрядным входам первого и второго ПЗУ, разрядные выходы которых подключены к управляющим входам первого и второго цифровых аттенюаторов, входы которых подключены к соответствующим выходам интерферомет- рического датчика, а выходы - к входам суммирующего усилителя, выход которого подключен к входу первого аналогового ключа. 1 ил. С
| В П ТВ | 0 |
|
SU408372A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
