По основному авторскому свидетельству № 46293 предложен способ повышения чувствительности устройств для телемеханики и телеизмерения, по которому для изменения вторичных параметров заставляют воздействовать механизм на электрическое сопротивление так, что, изменяясь по величине вслед за изменениями вторичных параметров, оно восстанавливает равновесие при достижении соответствия между первичными и вторичными параметрами.
Воздействие на вторичные параметры осуществляется при помощи реле, возвращающегося в нейтральное положение при восстановлении равновесия в системе и прекращающего воздействие на вторичные параметры.
Настоящее изобретение дает устройство для осуществления указанного способа в случае использования в качестве регулируемых сопротивлений соленоидов с переставными сердечниками; последние предлагается изготовлять из нескольких чередующихся между собой отрезков из магнитного и немагнитного материала.
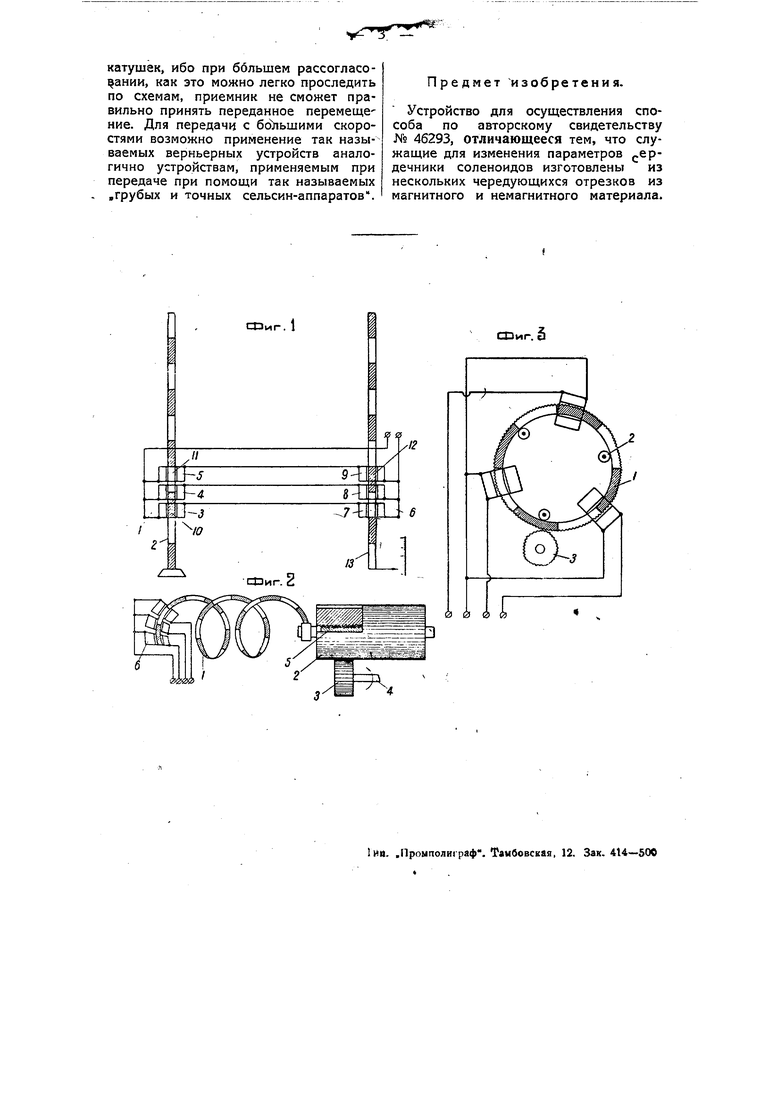
На чертеже фиг. 1, 2 и 3 изображают схематически предлагаемое устройство.
Устройство, представленное на фиг. 1, состоит из передатчика 1, в виде катушек соленоидов, сердечник 2 которых, проходящий через .три катущки 3, 4 и 5, соединен, например, с поплавком. Приемник 6 устроен аналогично.
Катущки 7, 8 и 9 последовательно соединены с соответствующими катушками передатчика. .Как стержень 2 передатчика, так и стержень 13 приемника состоит из чередующихся магнитных и немагнитных отрезков, длина каждого из которых соответствует осевой длине полутора катущек. Таких отрезков по длине стержня (определяемой максимальным ходом поплавка, т. е. диапазоном измеряемой величины у передатчика и желательным ходом стрелки-у приемника) может быть взято любое число.
В некоторый момент, указанный на
фиг. 1, стержень передатчика занимает положение, при котором магнитный отрезок стержня 10, является сердечником всей катушки 3 и половины катушки 4,. а магнитный отрезок 11 является сердечником катушки 5 и второй половины катушки 4. Сопротивление катушки 3 передатчика будет небольшим; ампервитки соединенной с ней последовательно катушки 7 приемника будут наименьшими; сопротивление катушки 4 будет меньше, а ампервитки катушки 8 будут больше; наконец, сопрртивление катушки 5 будет наименьшим-ампервитки катушки 9 будут наибольшими. Этим распределением ампервитков в катушках приемника и определится положение магнитного отрезка стержня 12 у приемника. Как легко проследить, при перемещении суержня 2 передатчика в любом направлении стержень 13 приемника будет следовать за ним в том же направлении. Если стержень разделен, например,- на десять магнитных и десять немагнитных отрезков и поплавок сдвинется, например, вверх, на своего полного хода (т. е. на 1% всего диапазона возможных изменений уровня), то из катушки 3 выдвинется, а в катушку 4 вдвинется магнитная часть стержня на осевой длины каждой из этих катушек, т. е. эффект будет таким же, как если бы в обычной схеме Brown Inst. С° (см. например, журнал „ftTM №46 1935г., стр. 49-50) уровень изменился бы на ЗОР/о.
Таким образом, если, например, в аппарате, устроенном по обычной схеме Brown, при изменении положения стержня в катушке на (что cooTBetствует точности работы телеметрического устройства) при данном потреблении мош ности передатчиком обеспечивается достаточная мош,ность на приемных катушках для перестановки стержня приемника, то в предлагаемой секционированной схеме точность работй при этом будет ОД®/о, ибо при десяти магнитных и десяти немагнитных отрезках на полный ход поплавка уже при передвижении стержня на 0, от полного хода положение магнитного отрезка в катушках изменится на 3°/о. В общем случае при том же потреблении мощности всем устройством точность секционированной схемы больше точности обычной схемы в гтг раз, где л-число магнитных отрезкой стержня, а т-число катушек. С другой стороны, при/работе с той же точностью предлагаемое устройство с секционированным стержнем потребит мощности в соответственное число раз меньше, что позволяет значительно уменьшить габариты катушек передатчика, выполнить устройство портативнее и дешевле.
На фиг. 2 и 3 изображены различные конструктивные варианты выполнения подобной схемы с секционированным стержнем для случая передачи не прямолинейных, а угловых перемещений. На фиг. 2 стержень 1, выгнутый в виде спирали, связан с зубчаткой 2, сцепленной с зубчаткой 3, которая сидит на оси 4, поворот которой передается. Зубчатка 2 при вращении одновременно перемещается вдоль неподвижного винта 5 и обеспечивает, таким образом, необходимое передвижение секционированного стержня 1 в катушках 6. На фиг. 3 секционированный стержень 1 выполнен в виде кольца, катящегося по роликам 2. По ободу кольца имеются зубцы, которыми кольцо сцепляется с зубчаткой 3, сидящей на управляющей оси.риемником для передатчиков типа, изображенного на фиг. 2 и 3, могут быть как устройства, аналогичные передатчикам (со стрелкой или регистрирующим механизмом на соответствующей оси), или приемник, изображенный на фиг. 1. Вообще, для любого передатчика, изображенного на фиг. 1, 2 и 3, подходит любой из приемников (разумеется, с соответственно подобранной шкалой и передачей на стрелку).
При конструктивном выполнении передатчика и приемника , по фиг. 3 возможно использование этого аппарата в качестве индикаторного синхронноследящего устройства. Ограничением является необходимость иметь на передающей оси достаточный момент для передвижения сердечника -в поле соленоида.
Кроме, того, скорость на передатчике не доляша быть настолько .большой, чтобы рассогласование между осями передатчика и приемника могло оказаться больше осевой длины полутора
катушак, ибо при ббльшем рассогласо ании, как это можно легко проследить по схемам, приемник не сможет правильно принять переданное перемеще ние. Для передачи с большими скоростями возможно применение так называемых верньерных устройств аналогично устройствам, применяемым при передаче при помощи так называемых .грубых и точных сельсин-аппаратов.
Предмет изобретения.
Устройство для осуществления способа по авторскому свидетельству № 46293, отличающееся тем, что служащие для изменения параметров (.ердечники соленоидов изготовлены из нескольких чередующихся отрезков из магнитного и немагнитного материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный электрический датчик уровня | 1957 |
|
SU116184A1 |
| Устройство для дистанционной передачи линейных перемещений | 1957 |
|
SU120859A2 |
| Бесконтактный электрический датчик линейных перемещений | 1957 |
|
SU116599A1 |
| Бесконтактный сельсин | 1957 |
|
SU114398A2 |
| Телемеханическое устройство | 1935 |
|
SU48689A1 |
| Устройство для авторегулирования и телемеханики | 1935 |
|
SU48688A1 |
| Бесконтактный сельсин | 1957 |
|
SU116512A1 |
| Бесконтактный сельсин | 1957 |
|
SU114291A1 |
| Бесконтактный сельсин | 1957 |
|
SU114237A1 |
| Управляемый двухфазный реверсивный асинхронный двигатель | 1959 |
|
SU129729A1 |
СОиг. 1
/
/О
13
СОиг. 2
СПиг. Q
0 0

