Предлагается устройство для авторегулирования и телемеханики, в котором управляющий контакт перемещается то по одному, то по другому потенциометру. Для этого применен дяи-aiель. с внешним возбуждением, направление тока в обмотках коею меняется, чем и достигается синхронизм передатчика и приемника.
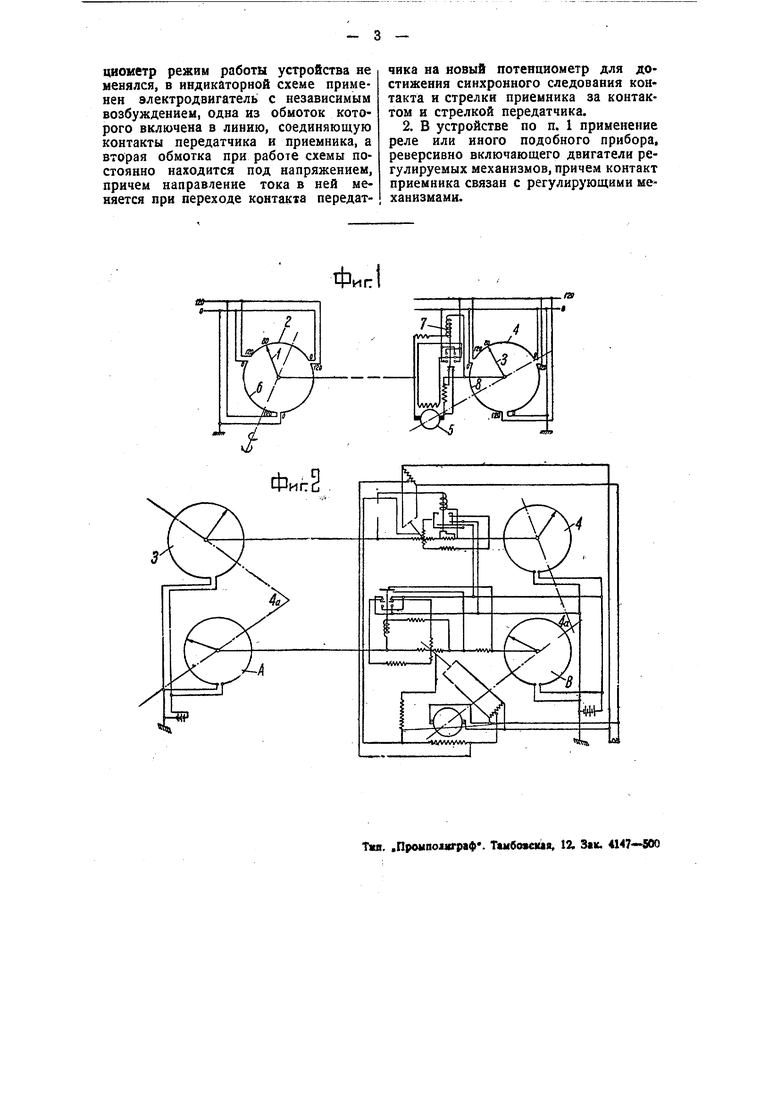
На чертеже фиг. 1 изображает принципиальную схему предлагаемого устройства; фиг. 2-несколько видоизменённую форму выполнения того же устройства.
На схеме (фиг. 1) скользящий контакт I, сидящий на оси прибора, угол отклонения которого передается (,дающего прибора), снимает в каждом данном положении опр1еделенное напряжение с потенциометра 2. Если коигактЗ, сидяпшй на оси приемного аппарата („приемника), снимает в этот момент ббльшее или меньщёе напряжение с потенциометра 4, то через обмотку ротора электродвигателя 5 протекает ток определенного направления, вызывающий поворот ротора и связанного с ним контакта 3 до тех пор, пока последний не займет совершенно определённого положения на потенциометре 4, зависящего от положения контакта 1
на потенциометре 2. По мере прибли жения контакта 3 к положению, соответствующему положению контакта 1, ток в роторе будет уменьшаться, т. е. в этой схеме имеется прямая зависимость между величиной тока в двигателе (моментом на оси двигателя) и углом поворота стрелок передатчика и приемника, что, как известно, дает определенную гарантию от перерегулировки и качания.
Пусть направление тока (от передатчика к приемнику) вызывает (при данном напранлении тока в обмотке возбуждения двигатетя) вращение ротора и контакта 3 против часовой стре1ки, а обратное направление тока (от приемника к передатчику)-по часовой стрелке. Эго будет вызывать следование стрелки приемника за стрелкой передатчика при движениях его в любую сторону (пока рассматривается только работа на потенциометрах-секция 2 передатчика и 4 приемника). Установим стрелку контакта 3 на 80 вольтах. Пусть теперь контакт 1, двигаясь против часовой стрелки, перейдет на потенциометр 6 и станет на положении, определяемом величиной в 10 вольт. Ротор двигателя 5 получит ток, идущий от приемника к передатчику, вследствие.
чего двигатель должен был бы поворачивать контакт 3 по часовой стрелке, т. е. в ложную сторону, но при переходе контакта 1 на потенциометр 6 на зажимах двигателя 5 появляется значительная разность потенциалов, и грубое реле 7, включенное на эти зажимы, не срабатывающее при сравнительно небольших напряжениях, появляющихся на зажимах двигателя 5 при работе на одном потенциометре, сработает и изменит направление тока в возбуждении двигателя 5. Последний повернется в нужном направлении (в данном случае против часовой стрелки) и начнет поворачивать контакт 3, причем, когда контакт 3 перейдет на потенциометр 8, реле 7 восстановит прежнее „правильное возбуждение, между тем как в роторе также протекает „правильный ток, и двигатель будет поворачиваться дальше до соответствующего положения стрелок. Легко проследить, что то же происходит и при движении контакта передатчика по часовой стрелке. Таким образом, как на работе на одном потенциометре, так и при переходах на другой сохраняется следование стрелки приемника за стре;;кой передатчика (или соответственно регулируемые механизмы анимают положение, соответствующее самому положению управляющих мехаизмов). Эта схема поэтому имеет любой д 1апазон (любое число секций-поенциометров на диапазон) и может лужить как синхронно-следящее устойство с большим диапазоном и выокой чувствительностью. Однако, в с lyчае больших скоростей на передатчике может случиться, что контакт 1 опередит контакт 3 больше, чем на половину секции и реле, 7 может дать ложное срабатывание.
-Для предупреждения этого применена так называемая верньерная система, изораженная на фиг. 2, в которой представлгна телерегулирующая синхронно-слеящая система. Если скользящий конакт в передатчике А опередит скользящий контакт на приемнике В на угол порядка 180 (половина секции на схеме), то рассогласование скользящих контактов у верньера передатчика 3 и верньера приемника 4 вызывает срабатывание реле верньерной системы, которая и
управляет & анизмом, пока угол рассогласования в основной системе не станет менее опасной величины. Верньерная система рассчитывается таким образом, чтобы весь диапазон укладывался в один оборот контакта верньерной системы, ,так что если система будет включена при любом угле рассогласования, сначала верньерная система приведет системы в приблизительное соответствие, после чего основная система приводит системы в полное соответствие.:
Как видно на схемах, при питании передатчика и приемника от источников постоянным током равного напряжения с одним заземленным полюсом для каждой системы связь между передатчиком и приемником осуществляется одним проводом (при двойной системе-два провода).
При обйхем питании любым током используются два общих провода питания на любое число систем и по одному проводу связи на аждую систему.
Применение предлагаемого устройства возможно всюду, где требуется синхронное следование одной системы за другой с большой точностью, в частности всюду, где применяется известная схема Сельсин.
Описываемая схема является телеметрической. В авторегулирующем устройстве вместо двигателя 5 может быть включено реле. На фиг. 2 вместо двигателя 5 включено ваттметровое реле с посторонним возбуждением, которое в зависимости от направления тока включает в том или другом направлении двигатели, причем приемник служит обратной связью, контролируя выполнение регулируемыми механизмами заданного им перемещения.
Предмет изобретения.
1. Устройство для авторегулирования и телемеханики, отличающееся тем, что с той целью, чтобы в синхронно-следящем потенциометрическом или мостовом устройстве контакт, связанный с осью передатчика, мог любое число раз обходить один или несколько потенциометров в любом направлении, причем при переходе на другой потенциометр режим работы устройства не менялся, в индикаторной схеме применен электродвигатель с независимым возбуждением, одна из обмоток которого включена в линию, соединяющую контакты передатчика и приемника, а вторая обмотка при работе схемы постоянно находится под напряжением, причем направление тока в ней меняется при переходе контакта передатчика на новый потенциометр для достижения синхронного следования контакта и стрелки приемника за контактом и стрелкой передатчика.
2. В устройстве по п. I применение реле или иного подобного прибора, реверсивно включающего двигатели регулируемых механизмов,причем контакт приемника связан с регулирующими механизмами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телемеханическое устройство | 1935 |
|
SU48689A1 |
| Аппарат для автоматического управления нажимным устройством прокатного стана | 1935 |
|
SU77023A1 |
| Способ повышения чувствительности устройства для телемеханики и телеизмерения | 1935 |
|
SU48691A1 |
| Коллекторный двигатель | 1957 |
|
SU117336A1 |
| Программно-следящее устройство | 1937 |
|
SU59719A1 |
| Следящий привод | 1941 |
|
SU67550A1 |
| Автоматический потенциометр | 1940 |
|
SU65604A1 |
| Устройство для комплексного управления органами сложного механизма | 1941 |
|
SU67551A1 |
| Следящий привод | 1941 |
|
SU67772A1 |
| Многообходный бесконтактный емкостный датчик | 1957 |
|
SU127591A1 |