Синхронно-следящие системы являются устройствами для те лвпередачи углов и угловых скоростей (а иногда и ускорений), т. е. устройствами, решающими в наиболее общей и совершенной форме задачу телемеханики. Авторским свидетельством № 46293 предусматривалась синхронно-следящая система, где наряду с основными преимуществами секционированных схем вообще (высокочувствитёльность, большой диапазон измерения или регулировки, надежность всех основных элементов) достигнута еще и малопроводность (один провод связи на аппарат), весьма существенная в телемеханических системах. Следование оси приемного аппарата за осью передающего аппарата, при переходе контакта передающего аппарата на новый потенциометр, в известном устройстве обеспечивается несколько искусственным путем (срабатыванием особого реле).
В описываемой ниже системе следование оси приемника за осью передатчика как при работе на одном потенциометре, так и при обходе скользящими контактами передатчика любого числа потенциометров на окружности и любого числа оборотов на весь диапазон движения передатчика, обеспечивается путем целесообразного использования свойств самой электрической цепи.
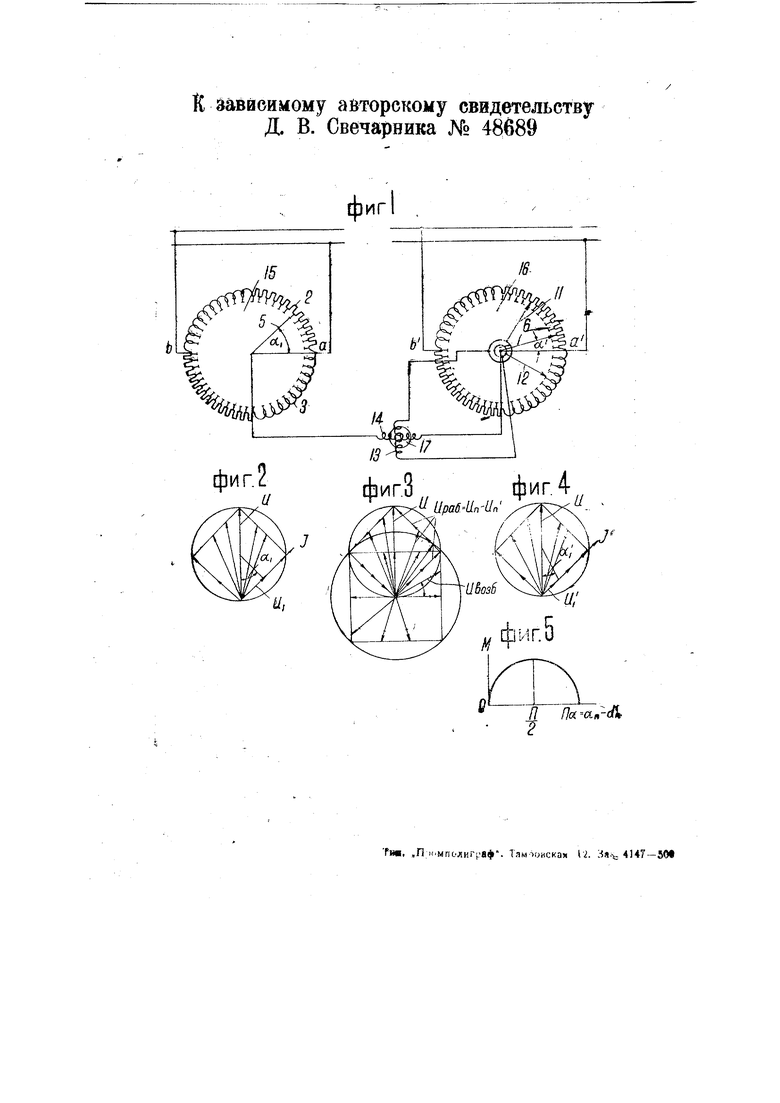
На чертеже фиг. 1 изображает принципиальную электрическую схему устройства, а фиг. 2-5-соответствующие векторные диаграммы.
Задача решена здесь применением схемы т. н. „кругового мостика. Эта схема представляет собой потенциометр, расположенный по окружности н составленный из активных и реактивных сопротивлений так, что вектор напряжения между скользящим контактом 5 или 6 (фиг. 1) и какой-нибудь точкой на потенциометре (напр, точкой а или соответственно a) является однозначной функцией угла между скользящим контактом и точкой а или a и, в свою очередь, угол между скользящим контактом и точкою а является однозначной функцией вектора напря жения между ними.
К- потенциометру передатчика 15 (фиг. 1), а именно к точкам а и 5 приложено напряжение U (фиг. 2). Предположим, что модули омической части потенциометра 2 и индуктивной.части 3 равны. Тогда ток в потенциометре будет отставать по фазе от напряжения на уголпорядка - . При движении
скользящего контакта 5 от точки а по окружности против часовой стрелки вектор напряжения U будет сначала совпадать по фазе с / и увеличиваться с увеличением угла а,; когда контакт 5 пройдет больше - по окружности от точки а, вектор напряжения начинает опережать / и в точке Ъ (угол 180°) U сделается равным и. При дальнейшем, движении в ту же сторону и опередит / больше, чем на Т тгЗтг
чнет опережать и, при угле же в „i/jj опередит / на - . При дальней i
шем увеличении угла f/n начнет уменьшаться (не меняя фазы) и при угле в 2it снова станет равным нулю. При движении контакта 5 в обратную сторону (по часовой стрелке) вектор напряжения будет также двигаться по часовой стрелке (фиг. 2).
Таким же путем легко показать, что вектор напряжения . между двумя скользящими контактами 11 и 12 (фиг. 1) при одновременном вращении их по окружности потенциометра 16 приемника будет также поворачиваться и занимать положения, изображенные на фиг. 3 (вектор t/вцзс. ).
Синхронно-следящая система (фиг. 1) состоит из кругового потенциометра 15, по которому скользит контакт 5 („передатчик), кругового потенциометра 16, по которому скользят жестко связанные (но электрически разделенные) контакты 6, 11 и 12 („приемник), и устройства 17,обмотка которого 14включена на разность напряжения 5 а и 6 и, обмотка 13-иа напряжение 12-И.
Угол «1 на передатчике 15 (фиг. 1) определит вектор U (фиг. 2); угол «ij
на приемнике 16 определит вектор U (фиг. 4) и вектор f/воз (фиг. 3) в обмотке 13.
В положении, изображенном на фигурах 1, 2, 3, 4, проекция U. f/j - - U на возб. положительная, и устройство заставит ось приемника 16 поворачиваться в соответствующую сторону до тех пор, пока не станет равно «1. Тогда f/4-f/i; u,,6.() проекция и,, на U равна нулю н мощность на устройстве 17 равна нулюЕсли бы передатчик начал поворачиваться в обратную сторону, то проекция f/p,,g на /,.,36. стала бы отрицательной, и ось приемршка также начала бы поворачиваться в противоположную сторону. Мощность на устройстве 17 - функция угла рассогласования передатчика и приемника;
Эта функция при заторможенном приемнике и враще11ий контакта передат чика может быть с известным приближением изображена в виде кривой на фиг. 5. Действительно, при неподвижном приемнике вектор U не меняет своей фазы. Проекция U на U, с увеличением угла рассогласования «
I f
01 ц-а И ДО величины-тг будет
t
возрастать, затем начнет уменьщаться и при а-It cos будет равен нулю (9-угол между и, и U и мощность на устройстве 17 равна нулюПри вращении оси приемника вслед за осью передатчика вращается также и вектор . И только я а - - , то приемник будет отрабатывать углы, задаваемые ему передатчиком на любом количестве оборотов в любую сторону. Таким образом, предлагаемая система обладает данными, характерными для одной из наиболее удачных синхронно-следящих систем, так называемой „сельсин, выгодно отличаясь от ,нее простотой и надежностью, малым количеством проводов („сельсин -три индивидуальных провода на каждый аппарат, предлагаемая же система имеет лищь один индивидуальный провод на аппарат) большей мощностью в управляемой
цепи (при той же величине мощности, потребляемой на питание всего устройства), отсутствием характерных для ,сельсина качаний приемника в магнитном пол и опасности при рывках и неустойчивом положении впасть во вращение с синхронной скоростью.
Для повышения чувствительности системы можно также поместить на окружносги несколько потенциометров. Чувствительность при этом возрастает в соответствующее число раз, ибо при том же геометрическом угле поворота передатчика электрический угол тем больше, чем большее число потенциометров расположено на окружности.
При возможности появления значительных углов рассогласования между передающей и принимающей системами () или при необходимости отрабатывать принимающими механизмами больших углов 180° электрических, мгновенно заданными передатчиком- применяется т. и. ,верньерная система, то-есть вторая система, совершенно аналогичная описанной, соединяется замедляющей передачей с основной системой.
Передача рассчитывается так, что при максимальном возможном угле рассогласования (когда основная система уже не сможет обеспечить синхронното следования приемника за передатчиком) верньерная система обеспечивает отработку заданного угла до такого положения, когда этот угол уже может быть воспринят основной системой, которая уже доводит принимающие механизмы до точного совпадения с передающими. Подобн/ й способ -сам по себе не является оригинальным и известен ранее.
Предмет изобретения.
Устройство для осуществления способа по авторскому свидетельству № 4Й293 с применением потенциометров, отличаюшееся тем, что круговой потенциометр составлен из активных и реактивных сопротивлений, подобранных так, чтобы фаза напряжения между скользящим контактом и любой точкой потенциометра была однозначной функцией угла между направлениями из центра, проводимыми на эту точк у и; на контакт.
к зависимому айторскому свидетельству Д. В. Свечарника № 48689

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для авторегулирования и телемеханики | 1935 |
|
SU48688A1 |
| Аппарат для автоматического управления нажимным устройством прокатного стана | 1935 |
|
SU77023A1 |
| Способ повышения чувствительности устройства для телемеханики и телеизмерения | 1935 |
|
SU48691A1 |
| Следящий привод | 1941 |
|
SU67550A1 |
| Бесконтактный электрический датчик линейных перемещений | 1957 |
|
SU116599A1 |
| Коллекторный двигатель | 1957 |
|
SU117336A1 |
| Сельсин постоянного тока | 1956 |
|
SU116739A1 |
| Электропривод | 1959 |
|
SU133089A1 |
| Многообходный бесконтактный емкостный датчик | 1957 |
|
SU127591A1 |
| Бесконтактный сельсин | 1957 |
|
SU116512A1 |
я /7й йя-Д

