1
Изобретение относится к функциональным счетно-решающим следящим системам и может найти применение в бортовых и наземных управляемых визирных системах.
Известна следящая система для отработки арктангенсной функции, содержащая электромеханический интегратор, вход которого связан с первым входом системы, а выход - через линейный вращающийся трансформатор - с статорной обмоткой первого синусно-конусного вращающегося трансформатора (СКВТ), роторная обмотка которого подключена к статорной обмотке второго СКВТ, первый исполнительный двигатель, вход которого через первый усилитель соединен с роторной обмоткой второго СКВТ, а вал - через первый вход дифференциала - с выходным валом следящей системы и роторами первого и второго СКВТ, первый и второй источники пропорциональных напряжений.
Известная система имеет низкую динамическую и статическую точность.
Предлагаемая система дополнительно содержит третий и четвертый СКВТ, переключающее устройство, сумматор, второй усилитель, второй двигатель, тахогенератор, редуктор и масщтабный трансформатор, при этом вал второго двигателя связан со вторым входом дифференциала и валом тахогенератора, а вход - с выходом второго усилителя, вход
которого подключен к выходу тахогенератора, ротор четвертого СКВТ непосредственно, а ротор третьего СКВТ - через редуктор соединены с выходным валом системы, вход масштабного трансформатора подключен к первому входу системы, а выход - к статорной обмотке возбуждения третьего СКВТ и через роторную косинусную обмотку третьего СКВТ - к одному из входов сумматора, другие входы которого подключены к выходу линейного вращающегося трансформатора (ЛВТ) и роторной синусной обмотке четвертого СКВТ, а выход - ко второму входу второго усилителя, выходы первого и второго источников пропорциональных напряжений соединены со входами переключающего устройства, выход которого подключен к статорной квадратурной обмотке первого СКВТ, управляющий вход - ко второму входу следящей
системы, а роторная синусная обмотка первого СКВТ соединена со статорной обмоткой возбуждения четвертого СКВТ.
Наличие дополнительных блоков и связей между ними позволяет значительно повысить динамическую и статическую точность системы, а также улучшить переходные процессы в системе.
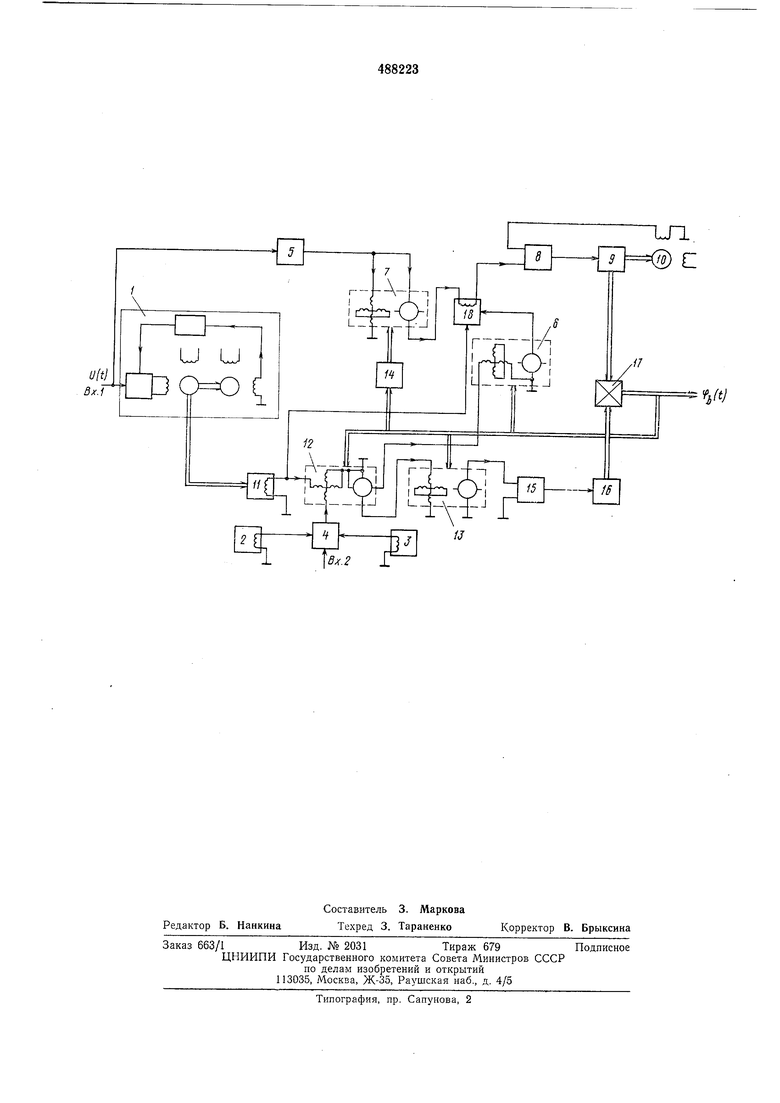
Блок-схема предлагаемой следящей системы представлена на чертеже.
Система содержит электромеханический интегратор 1, источники пропорциональных напряжений 2 и 3, переключающее устройство 4, масштабный трансформатор 5, СКВТ 6 и 7, усилитель 8, двигатель 9, тахогенератор 10, ЛВТ 11, СКВТ 12 и 13, редуктор 14, усилитель 15, двигатель 16, дифференциал 17, сумматор 18.
Следящая система работает следующим образом.
Входной сигнал U(t) в виде напряжения переменного тока, пропорционального тангенW
циальной скорости линии визирования-- поН
дается с входа Вх 1 системы на вход электромеханического интегратора 1. Одновременно это же напряжение подается на первичную обмотку масштабного согласующего трансформатора 5. Выход интегратора, поворот вала двигателя, пропорциональный интегралу от входного воздействия или тангенсу заданного значения воспроизводимой функции, передается на ЛВТ И. Линейный вращающийся трансформатор формирует напряжение, пропорциональное тангенсу. Это напряжение подается на одну из статорных обмоток вращающегося трансформатора 12, с помощью которого решается арктангенсная зависимость. На Другую статорную обмотку этого вращающегося трансформатора через переключающее устройство 4 подается одно из двух функционально связанных напряжений. Эти напряжения подбираются при настройке построителя: одно - для режима, в котором максимальная величина функции не превышает 78°; другое - для режима, в котором функция меняется до 89°. Оба эти режима характерны для определенных высот полета объекта. Поэтому их переключение осуществляется автоматом высоты. Такое разбиение режимов или изменение масштаба построителя позволяет получить более высокую точность его работы.
Выходной сигнал первого вращающегося трансформатора, снимаемый с косинусной обмотки, после домножения на cos фв, осуществляемого с помощью вращающегося трансформатора 13, поступает на вход усилителя 15, управляющего двигателем 16. Этот двигатель вращает нагрузку через механический дифференциал и одновременно разворачивает кинематически связанные с ним роторы вращающихся трансформаторов. Вращение двигателя происходит до тех пор, пока напряжение на входе первого усилителя не станет равным нулю. Пользуясь известной математической зависимостью, реализуемой четырехобмоточным синусно-косинусным вращающимся трансформатором, согласно которой на одной роторной обмотке индуцируется напряжение, равное
Р. Кг (Uc, cos рв - , sin срв), (1) на другой
P. /C,(t/c.Sincp, + f/c,COScp,),(2)
где f/ci 1 сг - напряжения на статорных обмотках; фв - угол поворота роторного вала ВТ; /Ст - коэффициент трансформации ВТ, и приняв f/c, f/мЯltgфвз ; , причем (H), аналитически сигнал рассогласования, поступающий на вход первого усилителя с косинусной обмотки второго вращающегося трансформатора, можно представить в таком виде
Bx.-KT.(,,,)Kr,cos,,(3)
где Кт,, Кт, - коэффициенты трансформации соответствующих ВТ; /м - максимальная величина пропорционального напряжения; /Ci, Kz - коэффициенты пропорциональности; РВ, ) фв -заданное и выходное значения функции.
В момент, когда Up, 0, угол поворота вала двигателя
:/.
(4)
Р, :arctgf/.
u,, , + ul
(5)
Из выражения (5) видно, что на второй роторной обмотке моделируется напряжение, пропорциональное секансу угла фв.
Из выражения (3) после преобразования получим
f/BX. /г. sin в,(6)
где
0 в. - срв;(7)
Aj - /(т, АГтг Аа и
Иш в 11ш «в, - в 0.(8)
- -ооt- oc
то
U, K,Q.(9)
Угловая скорость визирного луча связана с тангенциальной скоростью следующим соотнощением
COSV
(Ш)
Входное воздействие U(t) подается на первичную обмотку согласующего масщтабного трансформатора 5, имеющего две вторичных обмотки.
Одна вторичная обмотка этого трансформатора включена последовательно с косинусной обмоткой вращающегося трансформатора 7, ротор которого через редуктор 14 разворачивается на угол, равный 2фв; другая - к статорной обмотке этого же вращающегося трансформатора. Такое подключение позволяет реализовать математическую зависимость вида
JV (П)
Я Я2
Выход косинусной обмотки вращающегося трансформатора 7 подключен к выходу суммирующего устройства 18, имеющего два входа и трансформаторный выход. На один вход суммирующего устройства подается напряжение, пропорциональное тангенсу заданного значения функции (tgqjBs), снимаемое с ЛВТ 11, на другой - напряжение, процорциональное тангенсу текущего значения функции, которая получается перемножением величины секансного напряжения, снимаемого с роторной обмотки первого вращающегося трансформатора, на величину синусного напряжеНИН, формируемого вращающимся трансформатором 6. Аналитически сигнал рассогласования, поступающий на вход усилителя 8, управляющего исполнительным двигателем 9, охваченным тахометрической обратной связью, можно представить в таком виде t/Bx, (/С. tg в, - /Стз и,, tg ср,)+ Мno AtAt где Ktn, Kt3 - коэффициенты трансформации ЛВТ и ВТ. Выражение (12) после соответствующих преобразований принимает такой вид U,.., K,Q+K,,(13) Кь Кь - коэффициенты пропорциональности, причем ; , /Се - коэффициент пропорциональности. Таким образом, во втором канале формируется сигнал, пропорциональный ошибке и ее производной. Передаточная функция ошибки системы относительно входного воздействия имеет следующий вид в(р) (р) Щ(Р) WI (р) I + Wt(p) + K,w(p) ()-77) -Т W,{p),-p. После подстановки значений W(p) в выражение (14) и коэффициентов, выбор которых осуществлен таким образом, что при 1 - - Кп,К-п-, s; О получим )fr. 1 IlP 1 (1 + 4Ап, ./ОР-Ь/СП +Л4А,, 1 Анализ выражения (15) показывает, что в предлагаемом устройстве поставленная цель достигается; система имеет практически астатизм третьего порядка, что обеспечивает высокую динамическую точность, а относительный коэффициент затухания, определяемый выражением /С.., (.) при любом значении добротности обеспечивает апериодический переходный процесс, чем гарантируется высокое качество регулирования. Предмет изобретения Следящая система для отработки арктангенсной функции, содержащая электромеханический интегратор, вход которого связан с первым входом системы, а выход - через линейный вращающийся трансформатор - с статорной обмоткой первого синусно-косинусного вращающегося трансформатора (СКВТ), роторная обмотка которого подключена к статорной обмотке второго СКВТ, первый исполнительный двигатель, вход которого через первый усилитель соединен с роторной обмоткой второго СКВТ, а вал - через первый вход дифференциала - с выходным валом следящей системы и роторами первого и второго СКВТ, первый и второй источники пропорциональных напряжений, отличающаяся тем, что, с целью повышения динамической и статической точности, следящая система содержит третий и четвертый СКВТ, переключающее устройство, сумматор, второй усилитель, второй двигатель, тахогенератор, редуктор и масштабный трансформатор, при этом вал второго двигателя связан со вторым входом дифференциала и валом тахогенератора, а вход - с выходом второго усилителя, вход которого подключен к выходу тахогенератора, ротор четвертого СКВТ непосредственно, а ротор третьего СКВТ через редуктор соединены с выходным валом системы, вход масштабного трансформатора подключен к первому входу системы, а выход - к статорной обмотке возбуждения третьего СКВТ и через роторную косинусную обмотку третьего - к одному из входов сумматора, другие входы которого подключены к выходу линейного вращающегося трансформатора и роторной синусной обмотке четвертого СКВТ, а выход - ко второму входу второго усилителя, выходы первого и второго источников пропорциональных напряжений соединены со входами переключающего устройства, выход которого подключен к статорной квадратурной обмотке первого СКВТ, управляющий вход - ко второму входу следящей системы, а роторная синусная обмотка первого СКВТ соединена со статорной обмоткой возбуждения четвертого СКВТ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Устройство для осреднения вектора скорости ветра | 1962 |
|
SU151894A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1972 |
|
SU328390A1 |
| Устройство для испытаний механических элементов антенн | 1975 |
|
SU620939A1 |
| СЧЕТНО-РЕШАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408325A1 |
| Цифро-аналоговая следящая система | 1981 |
|
SU1029143A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366453A1 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ ВЕКТОРНОЙФУНКЦИИ | 1970 |
|
SU277905A1 |