1
Предложение относится к области электромеханических следящих систем стабилизации повышенной точности.
Известны следящие системы, содержащие управляющий блок, основной и дополнительный двигатели, подключенные через дифференциал к двухступенчатому редуктору, связанному с объектом регулирования.
В известных устройствах существенно снижается эффективность дополнительной корректирующей связи, ограничиваются возможности изменения параметров резонансного звена, что препятствует достижению высокой точности.
Недостатком известных систем является также ограничение их точности за счет кинематической погрешности редуктора и непостоянства момента трения.
Предлагаемая следящая система отличается от известных тем, что в нее дополнительно введены подключенный к выходу первой ступени редуктора двухполюсный датчик угла, например синусно-косинусный вращающийся трансформатор, и установленный на выходном валу многополюсный датчик угла, например индуктосин, с числом пар полюсов, равным передаточному отношению второй ступени редуктора, а выход двухполюсного датчика угла соединен с электрическим входом многополюсного датчика угла, выход которого подключен ко входу управляющего блока.
Это позволяет устранить влияние нежесткости редуктора на точность системы.
На чертеже представлена блок-схема.
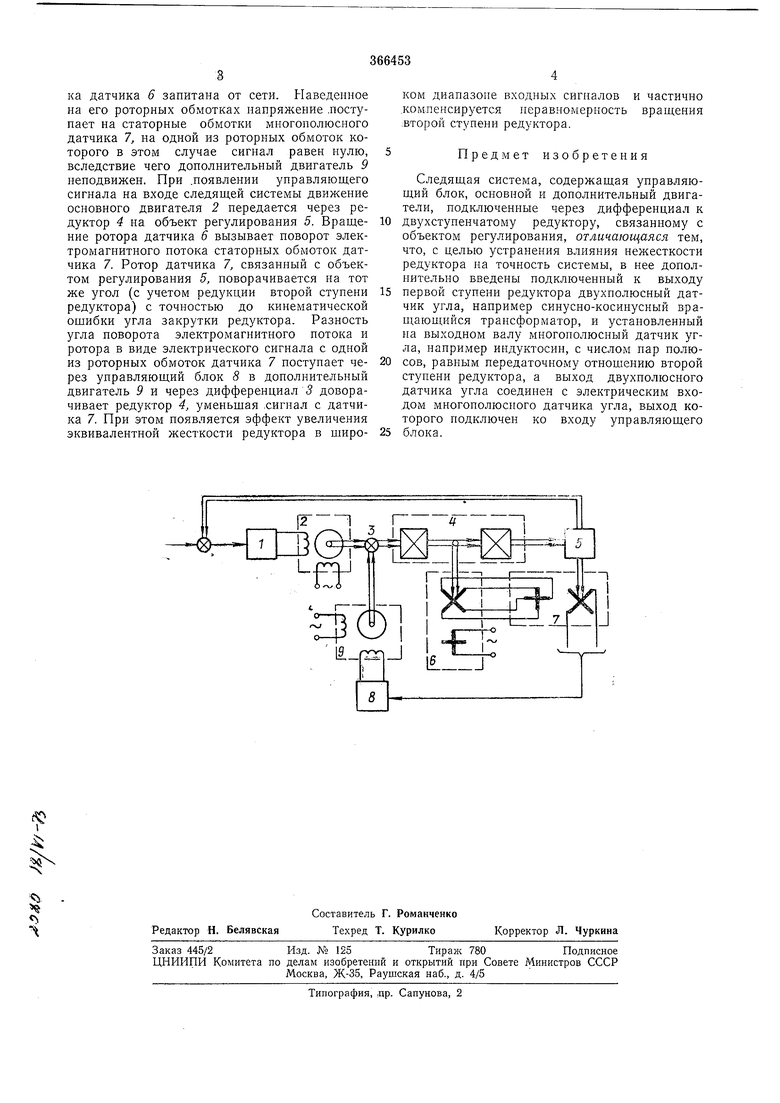
Устройство содержит последовательно соединенные усилитель /, основной двигатель 2, дифференциал 3, редуктор 4, состоящий условно из двух ступеней, и объект регулирования 5.
В предлагаемое устройство дополнительно введены нодключенный к выходу первой ступени редуктора датчик угла 6, имеющий небольшое число пар полюсов, например двухполюсный синусно-косинусный вращающийся трансформатор (СКВТ), и установленный на выходном валу многополюсный датчик угла, например индуктосин. При этом отношение чисел пар полюсов многополюсного и малополюсного датчиков равно передаточному отношению второй ступени редуктора 4, выход датчика угла 6 связан со статорными обмотками многонолюсного датчика 7, а выход подключен ко входу управляющего блока 8. Управляющий блок 8 через дополнительный двигатель 9 нодключен к одному из входов дифференциала 3.
Работа устройства.
В исходном положении нулевые отметки датчиков ( и 7 говмещены. Статорная обмотка датчика 6 запихана от сети. Наведенное на его роторных обмотках напряжение .поступает на статорные обмотки миогополюсного датчика 7, на одной из роторных обмоток которого в этом случае сигнал равен нулю, вследствие чего дополнительный двигатель 9 неподвижен. При .появлении управляющего сигнала на входе следящей системы движение основного двигателя 2 передается через редуктор 4 на объект регулирования 5. Вращение ротора датчика 6 вызывает поворот электромагнитного потока статорных обмоток датчика 7. Ротор датчика 7, связанный с объектом регулирования 5, поворачивается на тот же угол (с учетом редукции второй ступени редуктора) с точностью до кинематической ошибки угла закрутки редуктора. Разность угла поворота электромагнитного потока и ротора в виде электрического сигнала с одной из роторных обмоток датчика 7 поступает через управляющий блок 8 в дополнительный двигатель 9 и через дифференциал 5 доворачивает редуктор 4, уменьщая .сигнал с датчика 7. При этом появляется эффект увеличения эквивалентной жесткости редуктора в щироком диапазоне входных сигналов и частично .компенсируется неравномерность вращения .второй ступени редуктора.
Предмет изобретения
Следящая система, содержащая управляющий блок, основной и дополнительный двигатели, подключенные через дифференциал к
двухступенчатому редуктору, связанному с объектом регулирования, отличающаяся тем, что, с целью устранения влияния нежесткости редуктора па точность системы, в нее дополнительно введены подключенный к выходу
первой ступени редуктора двухполюсный датчик угла, например синусно-косинусный вращающийся трансформатор, и установленный на выходном валу многополюсный датчик угла, например индуктосин, с числом пар полюсов, равным передаточному отнощению второй ступени редуктора, а выход двухполюсного датчика угла соединен с электрическим входом многополюсного датчика угла, выход которого подключен ко входу управляющего
блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU559220A1 |
| ИНТЕГРИРУЮЩИЙ ПРИВОД | 1972 |
|
SU334556A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |
| Следящая система | 1975 |
|
SU607181A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
