Изобретение относится к счетно-решающим следящим системам.
Известные следящие системы для отработки векторной функции имеют переменную чувствительность, определяемую формульной чувствительностью решаемых уравнений. Поэтому они в системах отработки угла вектора и его модуля, кроме отрабатывающих синусно-косинусных вращающихся трансформаторов, усилителей и двигателей, содержат устройство для выравнивания чувствительности.
Предлагаемая следящая система отличается тем, что в нем выравнивающее устройство содержит вращающийся трансформатор, ротор которого расположен на одном валу с двигателем отработки модуля, а роторная обмотка через делитель подключена на вход усилителя последовательно и встречно с роторной обмоткой вращающегося трансформатора системы отработки угла вектора, причем параллельно последней обмотке подсоединена статорная обмотка вращающегося трансформатора выравнивающего устройства.
Это позволяет упростить систему и повысить ее надежность.
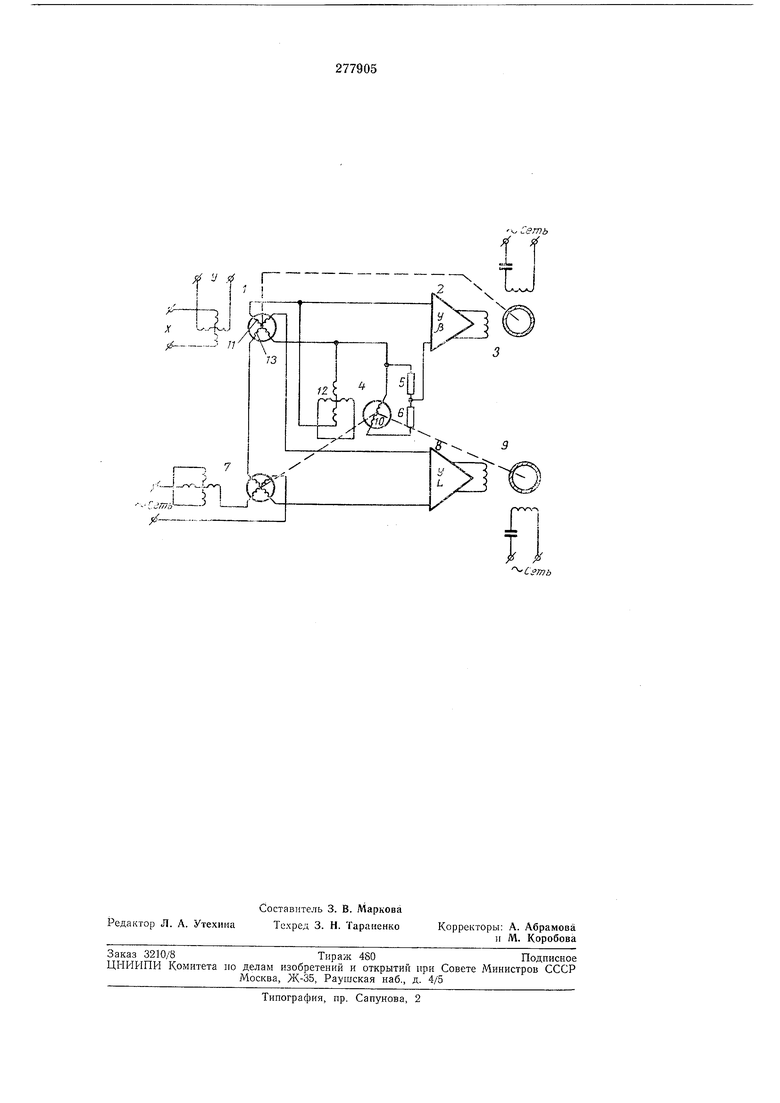
(СКВТ) /, усилитель 2 и двигатель 3 системы отработки угла вектора, вращающийся трансформатор (ВТ) 4, делитель устройства для выравнивания чувствительности 5, 6, отрабатывающий синусно-косинусный вращающийся трансформатор 7, усилитель 8 и двигатель 9 системы отработки модуля.
Ротор ВТ 4 кинематически связан с двигателем Р и ротором СКВТ 7, а роторная обмотка 10 через делитель 5, 6 включена на вход усилителя 2 последовательно с обмоткой 11 ротора СКВТ /, параллельно т оторой подключена статорная обмотка 12 ВТ 4. Ня статорные обмотки отрабатывающего СКВТ / поступают напряжения X и У, пропорциональные линейным составляющим вектора L. С роторной обмотки // сигнал рассогласования, пропорциональный углу f- вектора L, поступает на усилитель 2 следянхей системы, который управляет двигателем 3. Двигатель поворачивает СКВТ 1 в сторону уменьшения сигнала рассогласования, к его нулевому значению.
С квадратурной обмотки 13 напряжение, пропорциональное модулю вектора L, поступает на вход усилителя 8 следящей системы отработки модуля вектора L с сигналом в противофазе отрабатывающего СКВТ 7. Усилитель управляет двигателем 9, который поворачивает отрабатываюищй СКВТ 7 и выравнивающий ВТ 4. Для выравнивания формульной чувствительности отработки вектора L напряжение, 5 пропорциональное рассогласованию следящей системы отработки (3, подается на выравнивающий ВТ 4, кинематически связанной с валом системы отработки L, пропорциопально которому изменяется чувствительность систе- 10 мы отработки р. Напряжение с выхода роторной обмотки 10 ВТ 4 суммируется с сигналом рассогласования следующим образом. При (LO - величина формульной чув- 15 ствительности) сигнал с ВТ 4 вычитается из сигнала рассогласования, уменьщая тем самым его крутизну. При фаза выравнивающего сигнала изменяется на обратную, увеличивая тем са- 20 мым крутизну сигнала рассогласования. Масщтаб сигнала выравнивания подбирается коэффициентом трансформации ВТ 4 и делителем 5, 6. Выбирая отношение Lo/- min масщтаб вы- 25 равнивания Ло и цену оборота выравнивающего ВТ 4, можно получить различные выравнивающие зависимости. Аналитически сигнал рассогласования А, поступающий после выравнивания на вход 30 усилителя, можно представить следующим образом: A SL-eL :osinA(L-LO), где р - рассогласование следящей системы; 35 LO - величина формульной чувствительности;/Со - коэффициент масщтаба сигнала выравнивания, определяемый коэффицнентом трансформации выравни- 40 вающего ВТ 4 и коэффициентом делителя 5, 6; К -коэффициент пропорциональности, определяемый цепой оборота выравнивающего ВТ 4. Тогда колебание крутизны сигнала рассогласования в пределах изменения /.„,,„ L относительно принятого значбния чувствительности LO выражается в виде ду рЧ sin/С (L--/,(,) . plo L - LKoSinK(,) LO При необходимости более жесткого выравнивания выравнивающие ВТ 4 соединяются с редуктором через некруглую пару или функциональный кулак. Предмет изобретения Следящая система для отработки векторной функции, содержащая системы отработки угла вектора и его модуля, выполненные из отрабатывающих синусно-косинусных вращающихся трансформаторов, усилителей, двигателей и устройства для выравнивания чувствительности, отличающаяся тем, что, с целью упрощения и повышения надежности системы, устройство для выравнивания чувствительности содержит вращающийся трансформатор, ротор которого расположен на одном валу с двигателем отработки модуля, а роторная обмотка через делитель подключена на вход. усилителя последовательно и встречно с роторной обмоткой вращающегося трансформатора системы отработки угла вектора, причем параллельно этой последней обмотке подсоединена статорная обмотка вращающегося трансформатора выравнивающего устройства.
f f ; Г
Сеть
f f
J. I
NX
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОТРАБОТКИНАПРАВЛЕНИЯ ВЕКТОРА ПО ЕГО ПРЯМОУГОЛЬНЫМСОСТАВЛЯЮЩИМ | 1971 |
|
SU427314A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| СЧЕТНО-РЕШАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408325A1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| ИНДУКЦИОННЫЙ КОМПАС | 1973 |
|
SU395716A1 |
| Следящая система | 1977 |
|
SU696407A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Устройство для воспроизведения экстремальных характеристик | 1976 |
|
SU611220A1 |
| Счетно-решающее устройство для преобразования прямоугольных координат вектора в сферические | 1973 |
|
SU475627A1 |