Предлагаемая искусственная рабочая рука преднпзначенй для лишенных кисти калек, которым она дает возможность захватывать и удерживать произвольно долгое время различные предметы без напряжения мышц плеча и предплечья.
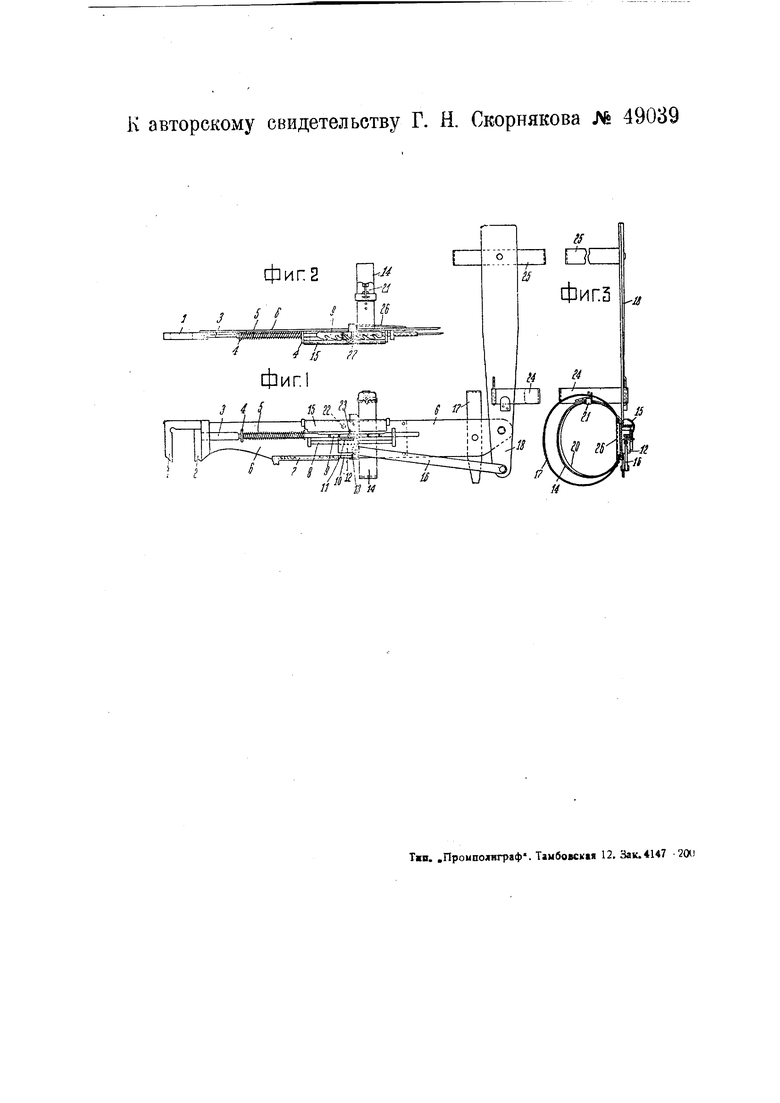
На прилагаемом чертеже фиг. 1 изображает схематически предлагаемую искусственную руку, общий вид сбоку; фиг. 2-детали управляющего захватыванием и удерживанием предметов механизма, согласно первой форме выполнения протеза и фиг. 3-то же согласно второй форме выполнения протеза.
Предлагаемая искусственная рабочая рука состоит из связанных между собою щарнирно плечевой и предплечевой пластинчатых шин, из которых предплечевая шина 6 несет на нижнем (дистальном) конце жестко с ней связанную П-образную скобу 1, между щеками которой переместимо установлена служап1ая для прижатия захваченного предмета к одной из щек скобы 1 губка 2.
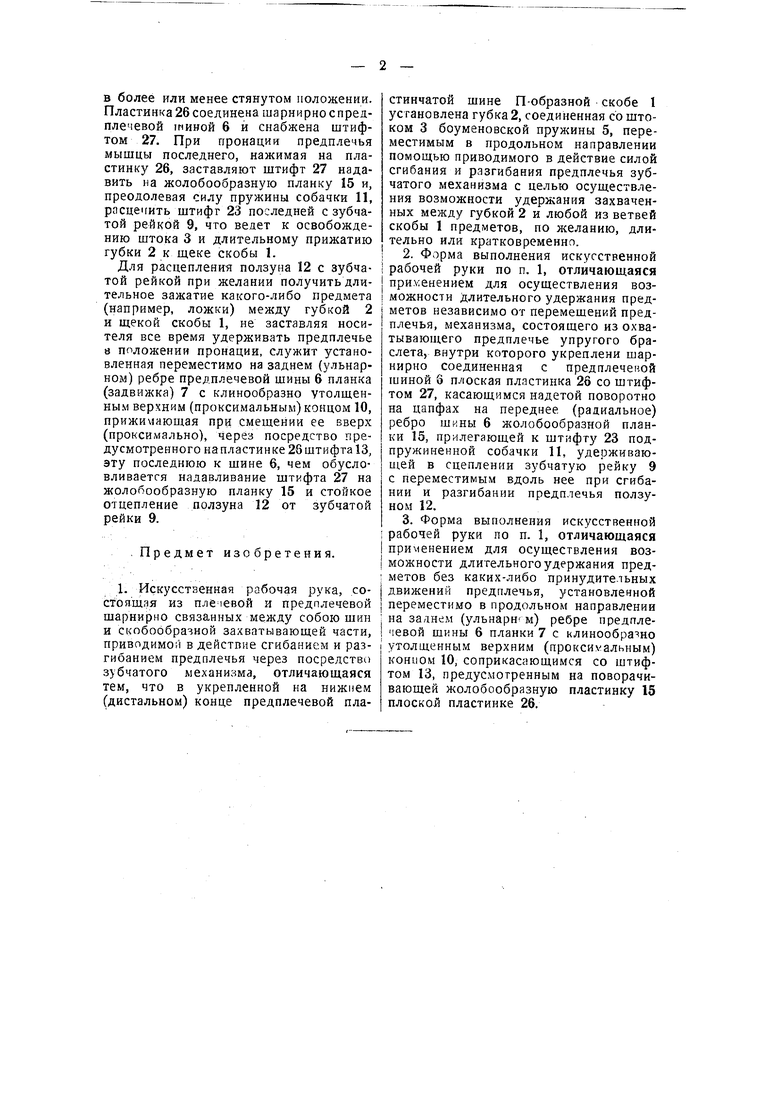
Губка 2 жестко соединена с концом сердечника боуменовской пружины или находящегося под действием спиральной пружины 5 щтока 3, переместимого в двух направляюших скобах 4, установленных на укрепляемой на предтечье носителя помощью упругих металлических раздвижных браслетов 14 и 17 пластине (шине) 6, шарнирно соединенной, как сказано выще, с плечевой пластиной (шиной) 18, удерживаемой на месте помощью браслета 25 и дугообразной скобы 24.
К нижнему дистальному концу плечевой пластины 18 укреплен, шарнирно шатун 16, несущий: на нижнем дистальном конце шарнирно же с ним связанный ползун 12, переместимый под установленной на предплечевой пластине (щине) в направляющей рейке 8. На этом ползуне 12 установлена снабженная щтифтом 23 собачка 11, находящаяся под действием пружины (не показанной на чертеже), удерживающей штифт 23 от сцепления с зубчатой рейкой 9, представляющей собой верхнюю (проксимальную) часть щтока 3.
На переднее (радиальное) ребро пластины. 6 надета поворотно на цапфах находящаяся под действием пружины 22 железобетонная планка 15, соприкасающаяся одной из щек с пластинкой 26, помеш,енной внутри раздвижной плоской кольцевидной пружины 20, расположенной внутри охватывающего предплечье носителя браслета 14 и снабженной пряжкой 21 для закрепления ее
в более или менее стянутом положении. Пластинка26соединена шарнирноспредплечевой шиной 6 и снабжена штифтом 27. При пронации предплечья мышцы последнего, нажимая на пластинку 26, заставляют штифт 27 надавить на жолобообразную планку 15 и, преодолевая силу пружины собачки 11, расцеиить штифт 23 последней с зубчатой рейкой 9, что ведет к освобождению штока 3 и длительному прижатию губки 2 к шеке скобы 1.
Для расцепления ползуна 12 с зубчатой рейкой при желании получить длительное зажатие какого-либо предмета (например, ложки) между губкой 2 и щекой скобы 1, не заставляя носителя все время удерживать предплечье 8 положении пронации, служит установленная переместимо на заднем (ульнарном) ребре предплечевой шины 6 планка (задвижка) 7 с клинообразно утолщенным верхним (проксимальным)концом 10, пpижиvlaющaя при смещении ее вверх (проксимально), через посредство предусмотренного на пластинке 26 штифта 13, эту последнюю к шине 6, чем обусловливается надавливание штифта 27 на жолобообразную планку 15 и стойкое отцепление ползуна 12 от зубчатой рейки 9.
.Предмет изобретения.
1. Искусственная рабочая рука, состоящая из плечевой и предплечевой шарнирно связанных между собою шин и скобообрачной захватывающей части, приводимой в действие сгибанием и разгибанием предплечья через посредство зубчатого механизма, отличающаяся тем, что в укрепленной на нижнем (дистальном) конце предплечевой пластинчатой шине П-образной скобе 1 установлена губка 2, соединенная со штоком 3 боуменовской пружины 5, переместимым в продольном направлении помощью приводимого в действие силой сгибания и разгибания предплечья зубчатого механизма с целью осуществления возможности удержания захваченных между губкой 2 и любой из ветвей скобы 1 предметов, по желанию, длительно или кратковременно.
2.Форма выполнения искусственной рабочей руки по п. 1, отличающаяся при.;енением для осуществления возможности длительного удержания предметов независимо от перемещений предплечья, механизма, состоящего из охватываюпхего предплечье упругого браслета, внутри которого укреплени шарнирно соединенная с предплеченой шиной S плоская пластинка 26 со штифтом 27, касающимся надетой поворотно на цапфах на переднее (радиальное) ребро шины 6 жолобообразной планки 15, прилегающей к штифту 23 подпружиненной собачки 11, удерживающей в сцеплении зубчатую рейку 9 с переместимым вдоль нее при сгибании и разгибании предплечья ползуном 12.
3.Форма выполнения искусственной рабочей руки по п. 1, отличающаяся применением для осуществления возможности длительного удержания предметов без каких-либо принудительных движений предплечья, установленной переместимо в продольном направлении на заднем (ульнарн м) ребре предплечевой шины 6 планки 7 с клинообразно утолщенным верхним (проксиуальным) KOHUOM 10, соприкасающимся со штифтом 13, предусмотренным на поворачивающей жолобообразную пластинку 15 плоской пластинке 26. фиг2 7 г //м 1 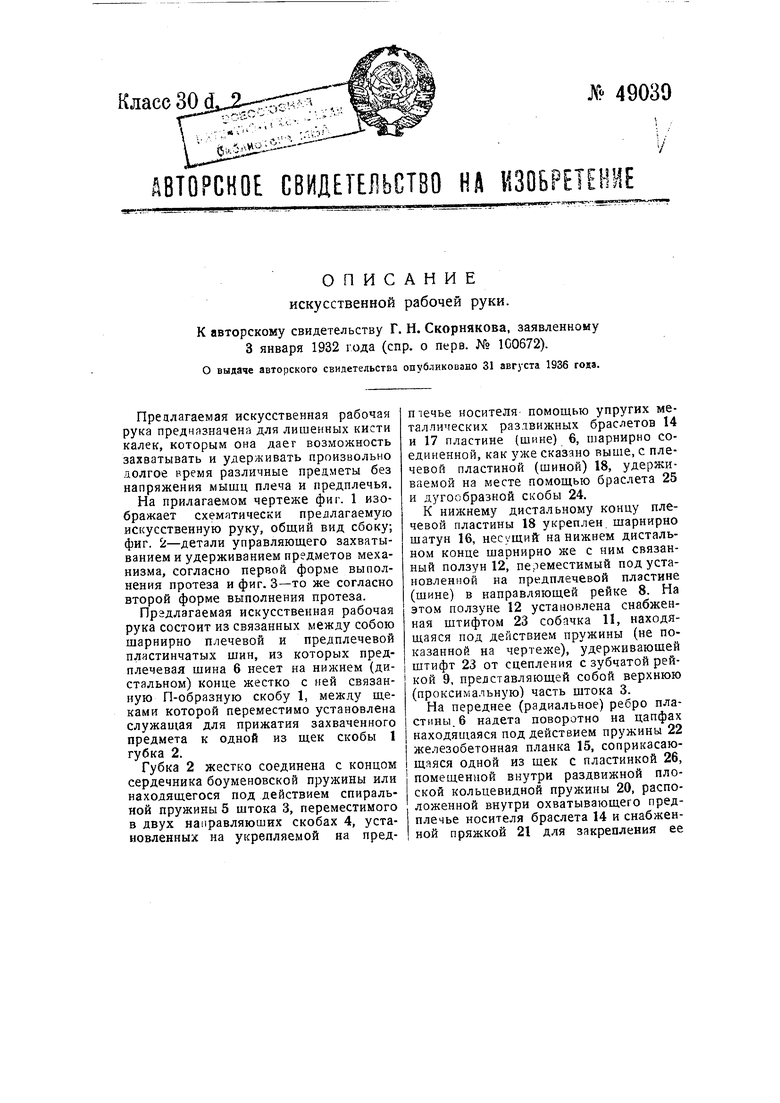
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления функции кисти у пациентов с параличами и парезами верхних конечностей | 2018 |
|
RU2695721C1 |
| Гониометр | 1936 |
|
SU54492A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
| Тренажер для укрепления верхних конечностей и туловища КУШЕТКА и способ его применения | 2022 |
|
RU2777248C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Способ восстановления функций верхней конечности у пациентов со спинномозговой травмой на шейном уровне | 2020 |
|
RU2747678C1 |
| СПОСОБ ПРОВЕДЕНИЯ БЛОКАДЫ КРУГЛОГО ПРОНАТОРА | 1995 |
|
RU2135221C1 |
| Посадочная машина | 1931 |
|
SU27807A1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |