PlsBecTiHbi уст ройства для зажима подвижного органа, надри мер гильзы шпинделя станка, содержащие раз|реэные зажимные элементы, расположеиные в кольцевой выемке неподвижного оргаиа.
Предлагае.мое устройство отличается от известных тем, что раз резные элементы выполнены в виде двух колец, наружные диаметры которых с усеченным.и конусами обжимает герметичная камера, образо ваняая эластичной Л1а1нжетой и жестким кольцом, в которую подведена рабочая среда под давлением.
TaiKoe BbinOvTHeHne устройства позволяет улучшить фиксацию подвижного органа без с.мещения его как в процессе зажима, так и в процессе работы, а также автоматизировать процесс зажима.
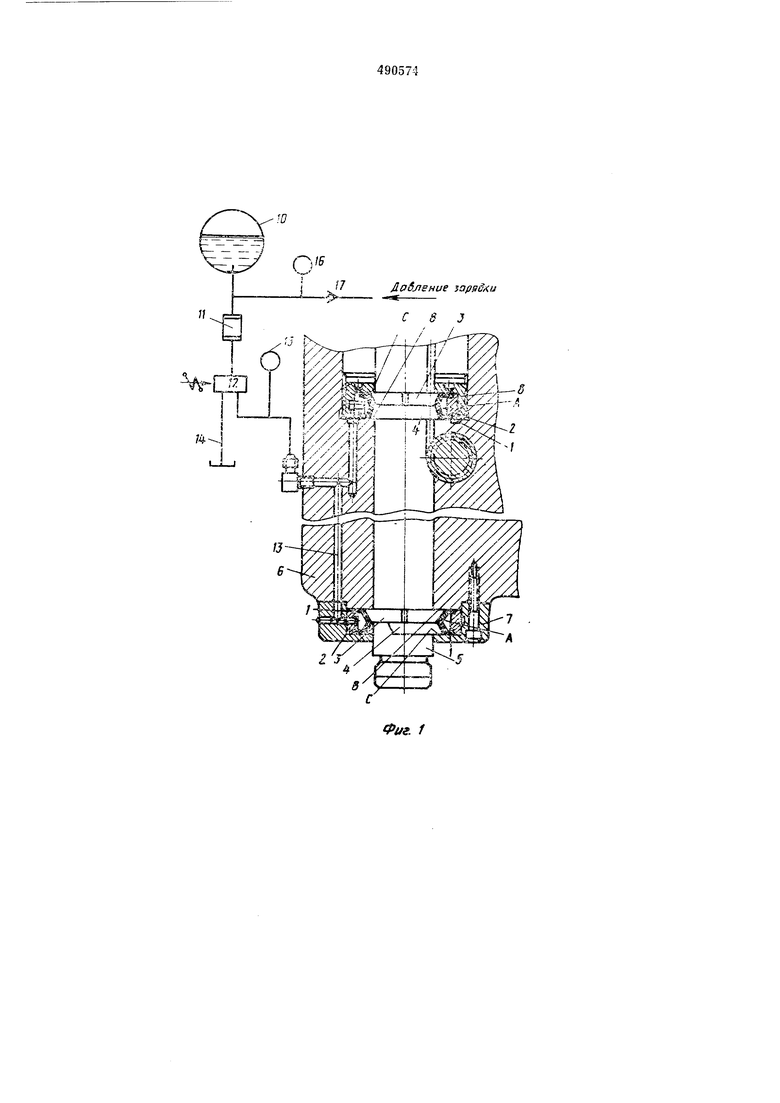
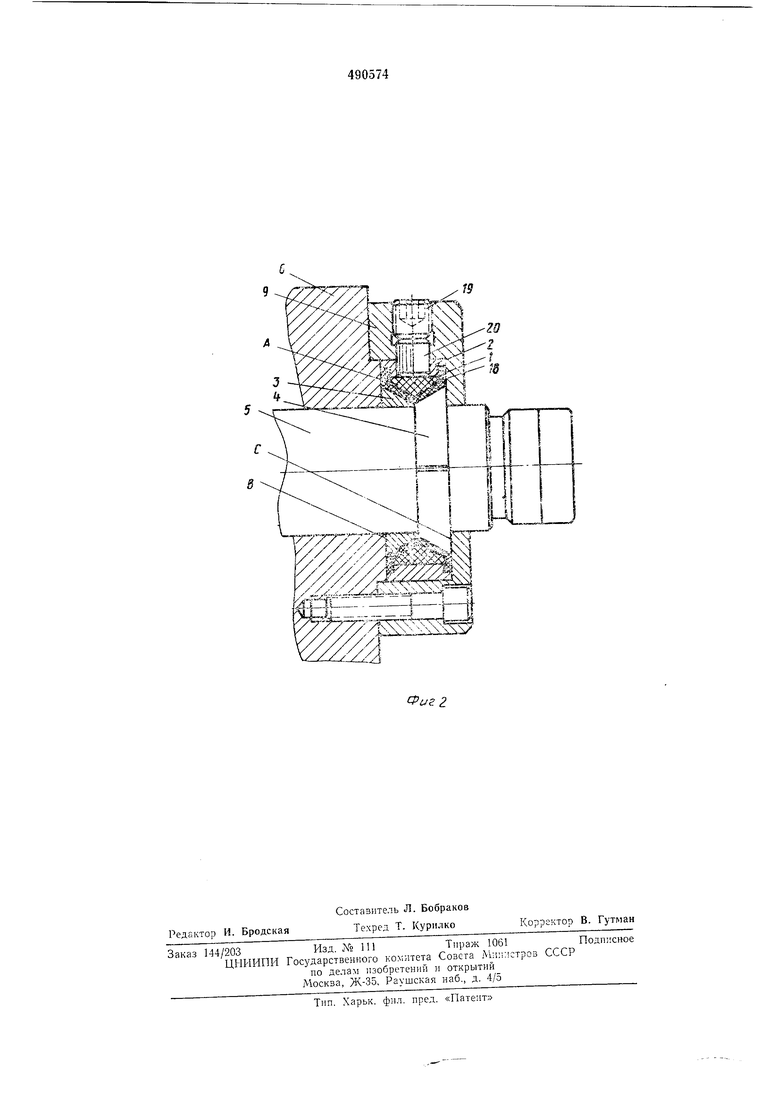
На фиг. 1 изображено устройство для зажима подвижного органа с дву.мя герметичными камерами и источником питания от гидр о аккумулятор а; на фиг. 2 - то же, с одной герметичной камерой, полость которой заполнена гидропластиком, а давление создается винтом и плунжером.
Устройство соде1рж.ит камеру .4 (фиг 1 и 2), которая образуется эластичной U-образной маижетой /, приклеенной по пери.метру к кольцу 2, два разрезных кольца 3 ii 4, которые но наружному диа.метру обжимаются манжетой 1, а по внуиревнему диаметру надеваются с небольшим зазором (по скользяш,ей посадке) на подвижную гильзу шпинделя 5, расположенную в корпусе шпиндельной голо;вки 6. Причем наружный диаметр колец 3 -я 4 выпол1нен в виде усеченного конуса, а внутренний диаметр - цилиндрическим.
Кольца 2 входят в корпуса 7, 8 i 9 зажимных устройств (которые в свою очередь крепятся известным способом или к торцу корпуса шпиндельной головки 6, например корпуса 7 и 9, или в выточке корпуса шпиндельной голоБки 6 - корпус 8) таким образом, чтобы кольца 5 и не были зажаты между торцами В ,и С.
Для осушествления зажима подвижного органа, рабочая среда под давлением подается в герметичные камеры А, например, от гидроаккумулятора 10 (фиг. 1) через ограничитель расхода //, клананы электричес1кого или меха нического управления 12 и каналы 3, выполненные в корпусе шпи ндельной головки 6. При этом слцвной трубопровод 14 перекрыт. Реле давления 15 служит для подачи импульса на отключение осевого перемещения гильзы шпинделя 5.
Для отжима подвижного органа клапан 12 перекрывает доступ рабочей среды от гидроаккумулятора 10, а камера .4 и полость реле давления 15 соединяются со сливным трубопроводом 14. При израсходовании энергии гидроа:ккумулятора 10 реле давления 16 автоматически включает насос для его подза ряд«|И. При достижении необходимого давления .насос отключается, а выход рабочей среды от гидроаккумулятора 10 запирает обратный клапаи 17.
В качестве рабочей среды, подающейся в камеру Л для зажйма подвижного органа, может быть использовав гидропластик 18 (фиг. 2). В этом случае давление будет создаваться ВИНТО.М 19 и плунжером 20, расположенные в корпусе 9 зажлмного устройства. Устройство для зажима подвин ного органа работает следующим образом.
При включении клалана электрического ил.и механического управления 12 (фиг. 1) рабочая ореда, например масло из гидроаккумулятора 10, поступает по трубопроводу через ограничитель расхода 11 w. ка;налы 13 в камеру А зажимлого устройства.
Рабочая среда давит равномерно со всех сторои через манжету / на кольца 3 и 4, вызывая их ра-вномереый обжим вокруг подвижного органа, например гильзы шпинделя 5. :В результате этого возникает трение, достаточное для того, чтобы зафиксировать 1ильзу шпинделя 5 от осевого перемещения без смещения ее о.си в процессе зажима. Од овременно за счет конусов на кольцах 3 п 4 создается осбвое усилие, посредст1вом которого выбирается зазор .между торцом В корпуса шпиндельной головки 6 и торцом кольца 3, а также между торцом С корпусов 7, 8, 9 н торцом кольца 4. При п;роцессе зажима сливной трубопровод 14 перекрыт, а реле давления 15 подает импульс на отключение осевого перемещения гильзы шпинделя 5, например, через электромагнитную муфту, которая разорвет кинематическую цепь передачи осевого перемещения гильзы 5.
При отжиме гильзы шпинделя 5 клапан управления 12 выключается, рабочая среда,
идущая от гидр о аккумулятор а 10 перекрывается, камера А и полость реле давления 15 соединяются со слизным трубопроводом 14, давление рабочей среды в ка.мере Л падает, 5 и кольца 3 я 4 освобождают гильзу шпинделя 5. В это время включается муфта кинематической цепи осевой подачи посредством реле давления 15.
В том случае, когда в качестве рабочей
среды используется гидропласт 18 (фиг. 2), давление создается поворотом винта 19. При этом осевое усилие винта 19 действует на плунжер 20, который в свою очередь давит на рабочую среду 18 (гидропласт) и своим
5 объектом вытесняет ее (его). В результате этого в камере Л создается давление, необходимое для фиксации гильзы шпинделя 5 без смещения ее оси по принципу, описанному выше.
Для отжима гильзы 5 достаточно повернуть винт 19 в другую сторону. Плунжер 20 под действием давления рабочей среды 18 займет исходное ноложение и произойдет 25 отжим.
Пред.мет изобретения
Устройство для зажима подвижного орга30 на, например гильзы шпинделя станка, содержащее разрезные зажимные элементы, свободно о.хватывающие подвижной орган и расположен1ные в кольцевой выемке неподвижного органа, отличающееся тем, что, с целью 35 улучщевия фиксации подвижного органа и автоматизации процесса зажима, разрезные элементы выполнены в виде двух колец, наружные диаметры которых с усеченными конусами обжимает герметичная камера, обра40 зованная эластичной манжетой и жестким кольцОМ, в которую подведена рабочая среда под давлением.
Т/ ij - ,;-L/-rt-r
, 6
СД -
ДаблЕние japsSx.u
С 8 J
Фиг. 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки разрезных поршневых колец | 1986 |
|
SU1371837A1 |
| Устройство для зажима инструмента в шпинделе металлорежущего станка | 1980 |
|
SU965610A2 |
| Шпиндельное устройство | 1983 |
|
SU1144773A1 |
| МЕХАНИЗМ ФИКСАЦИИ ИНСТРУЛ\ЕНТАЛЬНОЙ ОПРАВКИ С РАДИАЛЬНЫМ СУППОРТОМ В ШПИНДЕЛЕ СТАНКА | 1972 |
|
SU348301A1 |
| Шпиндельный узел металлорежущего станка | 1985 |
|
SU1284732A1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ ПОРШНЕВОЙ АККУМУЛЯТОР МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА И ВЫСОКИХ ДАВЛЕНИЙ | 2006 |
|
RU2330190C1 |
| Шпиндельное устройство | 1981 |
|
SU952467A1 |
| ПАКЕР МЕХАНИЧЕСКИЙ | 2023 |
|
RU2821333C1 |
| Устройство для автоматического крепления инструмента | 1986 |
|
SU1400792A1 |
| Устройство для механизированного крепления инструмента | 1985 |
|
SU1315171A1 |