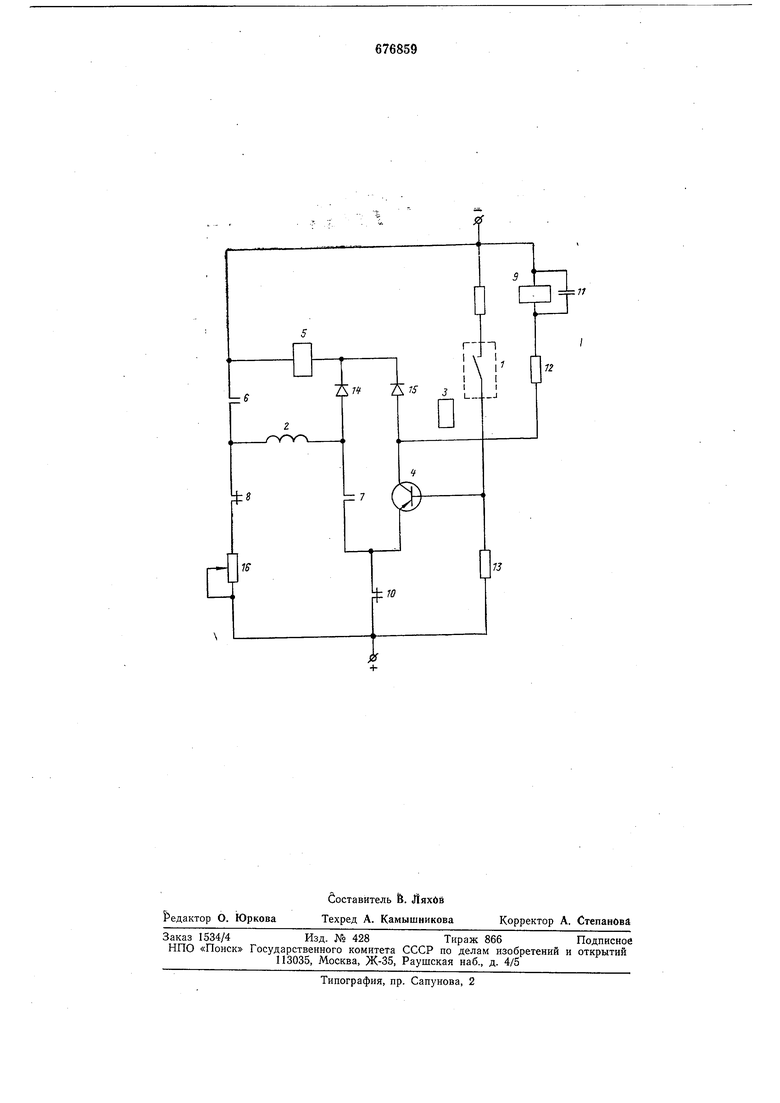
разомкнутым контактом реле контроля, а магнитоуправляемый контакт включен в базовую цепь транзисторного ключа. На чертеже показана схема предлагаемого бесконтактного датчика положения рабочего органа механизма. Датчик содержит магнитоуправляемый контакт 1, обмотку 2 нодмагничивания, постоянный магнит 3, транзисторный ключ 4, обмотку 5 реле контроля с нормально разомкнутыми контактами 6 и 7 и нормально замкнутым контактом 8, обмотку 9 дополнительного реле с нормально замкнутым контактом 10, конденсатор II, резисторы 12 и 13, диоды 14 и 15 и переменный резистор 16. Датчик работает следующим образом. При отсутствии постоянного магнита 3, установленного на рабочем органе в зоне установки магнитоуправляемого контакта 1, последний разомкнут,-и транзисторный ключ 4 закрыт положительным смещением, снимаемым с резистора 13. Обмотки 5 и 9 реле контроля и дополнительного реле обесточены. Через переменный резистор 16, нормально замкнутый контакт 8, обмотку 2 подмагничивания и обмотку 5 реле контроля протекает ток. При этом поле, создаваемое обмоткой 2 подмагничивания, направлено согласно с полем постоянного магнита 3. Поток, создаваемый обмоткой 2, устанавливается переменным резистором 16, близким к потоку срабатывания магнитоунравляемого контакта 1. При подходе постоянного магнита 3 к положению срабатывания контакта 1 поток его, суммируясь с потоком обмотки 2, вызывает замыкание магнитоуправляемого контакта 1. При этом транзисторный ключ 4 открывается, основное реле 5 срабатывает и через нормально замкнутый 10 и нормально разомкнутый 7 контакты самоблокируется, контакты 6 и 8 реле 5 переключаются, и по обмотке 2 начинает протекать ток, поле которого направлено встречно полю постоянного магнита 3, компенсируя его настолько, что контакт 1 размыкается и транзисторный ключ 4 закрывается, а реле 5 остается включенным. Дополнительное реле 9 при этом не успевает включаться из-за наличия времязадающей цепи, образованной резистором 12 и конденсатором 11, а разделительный диод 15 не позволяет реле 9 включиться при замкнутом контакте 7. Разделительный диод 14 обеспечивает включение обмотки 2 только после включения реле 5. При отводе постоянного магнита 3 от точки контроля магнитоуправляемый контакт 1 под действием потока, создаваемого обмоткой 2, вновь замыкается. При этом реле 9 срабатывает и своим нормально замкнутым контактом 10 обесточивает реле 5 и обмотку 2. Датчик вновь подготовлен к работе. Таким .образом, за счет исключения протекания тока реле контроля и дополнительного реле через магнитоуправляемый контакт срок службы последнего значительно увеличивается,чем обеспечивается повышение надежности датчика. Формула изобретения Бесконтактный датчик положения рабочего органа механизма, содержащий магнитоуправляемый контакт с обмоткой подмагничивания, реле контроля с двумя нормально разомкнутыми и нормально замкнутым контактами, дополнительное реле с времязадающей цепочкой, постоянный магнит, устанавливаемый на рабочем органе механизма, два диода, резистор настройки и источник питания, реле контроля подключено к одному из полюсов источника питания непосредственно, а к другому - по цепи, состоящей из последовательно соединенных первого диода, обмотки подмагничивания, нормально замкнутого контакта реле контроля и резистора настройки, и цепи, состоящей из первого диода, первого нормально разомкнутого контакта реле контроля и нормально замкнутого контакта дополнительного реле, второй нормально замкнутый контакт реле контроля подключен между точкой соединения обмотки подмагничивания с нормально замкнутым контактом реле контроля и точкой соединения обмотки реле контроля с полюсом источника питания, отличающийся тем, что, с целью повыщения надежности датчика, он снабжен транзисторным ключом, подключенньш между точкой соединения резистора времязадающей цепочки с вторым диодом и точкой соединения нормально замкнутого контракта дополнительного реле с нормально. разМкнутым контактом реле контроля, а магнитоуправляемый контакт включен в базовую цепь транзисторного ключа. Источники информации, ,принятые во внимание при экспгёртизе 1. Агейкин Д. И. Датчики систем контроля и регулирования. М., «Машиностроение, 1965. 2. Авторское свидетельство СССР № 362769, кл. G 01Р 13/00, 1971.
От 

| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный датчик положений рабочего органа механизмов | 1974 |
|
SU491898A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЙ РАБОЧЕГО ОРГАНА МЕХАНИЗМОВ | 1973 |
|
SU362789A1 |
| Датчик положений рабочего органа механизма | 1979 |
|
SU873132A1 |
| Устройство для управления работой путевого выключателя | 1977 |
|
SU700879A1 |
| Бесконтактный датчик положений рабочего органа механизма | 1977 |
|
SU708232A1 |
| Устройство для управления работой путевого выключателя | 1979 |
|
SU807878A1 |
| Путевой выключатель | 1978 |
|
SU855777A1 |
| Бесконтактный путевой выключатель | 1973 |
|
SU529502A1 |
| Устройство для управления работойпуТЕВОгО ВыКлючАТЕля | 1979 |
|
SU805437A1 |
| ОГРАНИЧИТЕЛЬ НАПРЯЖЕНИЯ ХОЛОСТОГО ХОДА ИСТОЧНИКА ПИТАНИЯ СВАРОЧНОЙ ДУГИ | 2004 |
|
RU2276634C1 |
-е
гО
п
72
15
о
п
7J
