1-1зобрете11ие относится к области шлифования и предназначено для обработки шариков, например, к шарикоподшипникам.
Известны устройства для доводки шариков между двумя дисками, один из которых снабжен канавкамп для шариков, другой выполнен плоским, причем один из дисков связан с приводом Браш,ательпого движения.
С целью повышепия точности и производительности обработки в предлагаемом устройстве капавкп на диске в нлане выполнены в форме эллипсов, при этом один из дисков дополнительно снабжен приводом прямолинейного возвратно-поступательного двнжения. Соотношенпе большой и малой полуосей элемента выбрано 0,6-0,75.
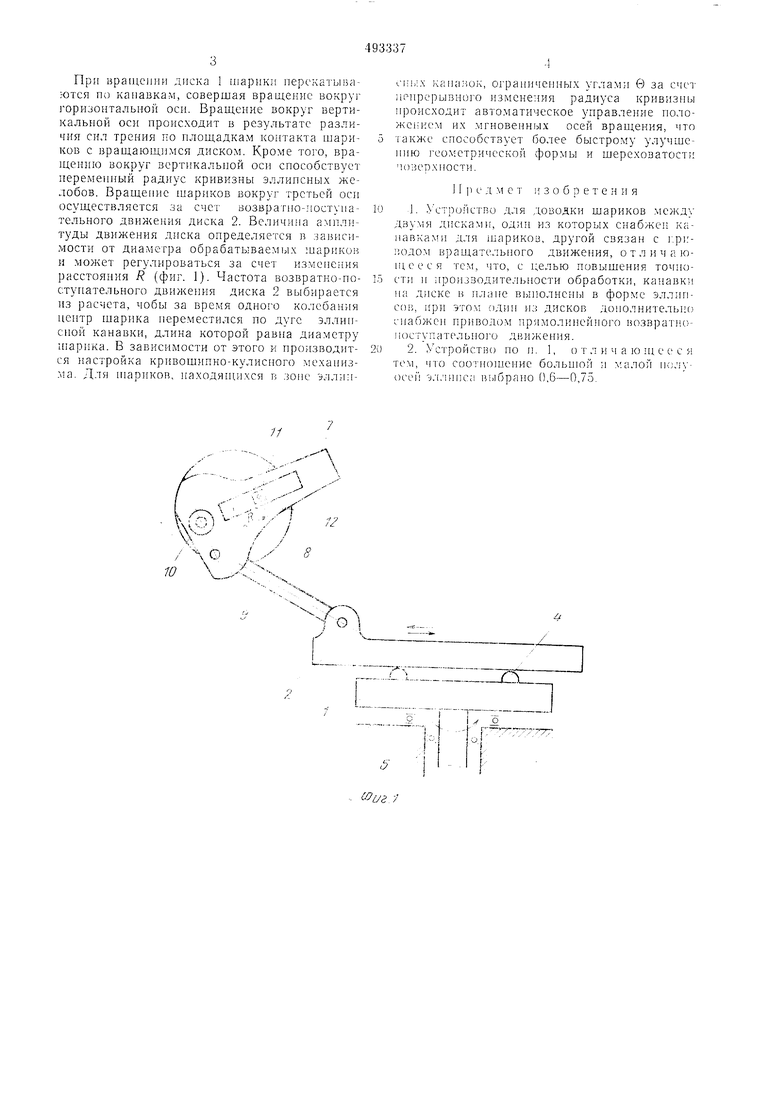
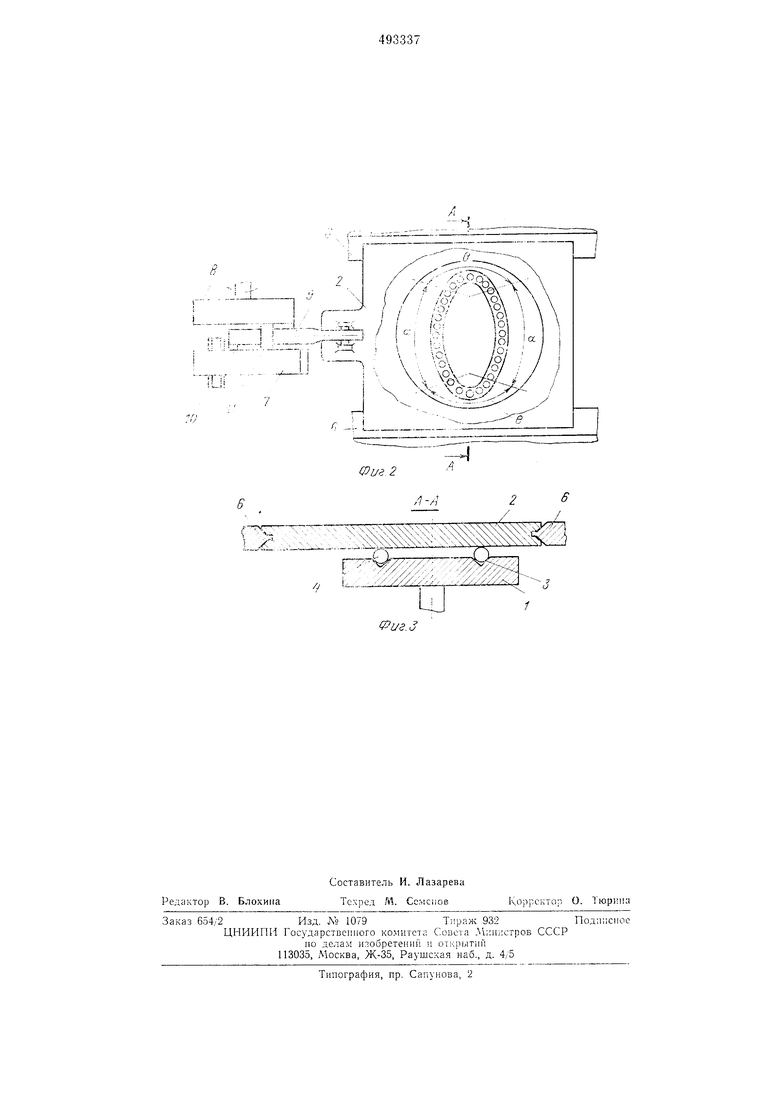
На фиг. 1 показана конетруктивпо-кинематическая схема предлагаемого устройства с одпой капавкой; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез по А-А на фиг. 2.
Устройство для доводки шариков содержит диски 1 и 2, между которыми в канавках 3 расположены шарики 4. Диск 1 имеет привод и установлен па шпинделе 5. Канавки 3 диска 1 выполнены в плапе в форме эллипсов. Соотпошеппе большой и малой полуосей эллипсов составляет 0,6-0,75. Шарики 4, расположеппые в канавках, контактируют с плоским диско:, который получает прямолинейное возвратно-поступательно перемещение в направляющнх 6 от привода через кривошипнокулисньи механизм. Кривошиппо-кулиепый мехаппзм содержит кулису 7, крпвошиппьи диск 8, шатун 9, неподвижную ось 10, кулпспый камень 11, ось которого 12 расположег1а па кривошнпном диске 8.
Устройство работает следуюпдим образом.
Шарпкп 4, например, посредством кольпевого элеватора, п ieющeгo вертикальную ось враи1сния размешают в канавках 3 днска 1. Последний приводится во вращепие с постояппой угловой скоростью через шпппдель 5. Диск 2 через приводно крпвошиппо-кулисный механизм еовершает в направляюпи1Х 6 прямолпнейное возвратно-поступательное дв жение. По степепи действия сил резания эллипсные канавкп ус.ювно можно разделить па две зоны, ограниченные углами а п 6, где a 2arctgE, в л-2 arcige (е - эксцентриситет эллипса).
Пз всех шариков, паходян.ихся в эллнисиых канавках наибольшее число их располагается в зопе, ограппчепной угламп (фпг. 2). Этому способствует оптпмальпое еоотношеппе больших п малых полуосей эллипсов. Шарпкп, паходяшиеся в желобах в зопе обработки, ограниченной а, получают гара;тированпое трехосное вращение вокруг трех взаимно перпег1дикулярпых осей.
3
При вра цс11ми диска 1 шарики перскаты1)а ются ио канавкам, совершая вращение вокруг -оризонталы-10Й оси. Вращение вокруг вертикальной оси происходит в результате различия сил трения по площадкам контакта шариков с вран ающимся диском. Кроме того, враи ению вокруг вертикальной оси снособствуст переменный радиус кривизны эллинсных желобов. Вращение шариков вокруг третьей оси осуществляется за счет возвратно-постуиательного движения диска 2. Величина амплитуды движения диска оиределяется в зависимости от диаметра обрабатываемых шариков и может регулироваться за счет изменения расстояния R (фиг. 1). Частота возвратно-ностунательного движения диска 2 выбирается 113 расчета, чобы за время одного колебания центр шарнка нереместился по дуге эллинсной канавки, длина которой равна диаметру ншрика. В зависимости от этого и нроизводится настройка кривощипно-кулисного механизу а. Для HiapHKOB, находяни1хся в зоне эллинcin.ix кана;юк, ограниченных углами в за счет непрерывного 1змснения радиуса кривизгн нроисходит авто.матическое управление ноложе1п-:ем их .мгновенных осей вран;ения, что также способствует более быстрому улучшению геометрической формы и шереховатости човерхности.
Ире д м е т изобретения
. Устройство для доводки шариков двумя диеками, один из которых снабжен канавка и1 для iuapHKOB, другой связан с r.pi:1 одом врандательного движения, отличаюН1ееся iCM, что, с целью повышения точности 11 производительности обработки, канавю на диске в плане выполнены в форме ЭЛЛИНСОР., ispii этом один нз дисков дополнительно снабжен приводом прямолинейного возвратнопоступательного движения.
2. Устройство но 11. 1, о т л и ч а ю И1, е е с я тем, что соотио1неиие больиюй и полуосей э.1.1нпс;1 выбрано 0,6-0,75.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| Способ доводки шариков | 1980 |
|
SU948627A1 |
| ТРАНСМИССИЯ | 1997 |
|
RU2161741C2 |
| Вертикальный доводочный станок для доводки отверстий волочильных фильер | 1956 |
|
SU110741A1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2500938C1 |
| Устройство для обработки оптических деталей | 1990 |
|
SU1816659A1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
| Способ обработки резанием циклоидальных поверхностей | 1985 |
|
SU1337202A1 |
| Устройство для обработки деталей сложной формы | 1978 |
|
SU742038A1 |
| Устройство для доводки шариков | 1976 |
|
SU663560A1 |
6
(
yf
Фиг 2
А-/
ЖШ1
)
