Предлагаемое приспособление к комбайнам и другим уборочным машинам для подъема полегшего хлеба снабжено парными изогнутыми захватами и приводится в действие с помощью пневматического или гидравлического привода. Приспособление может быть использовано, например, в пневматических комбайнах.
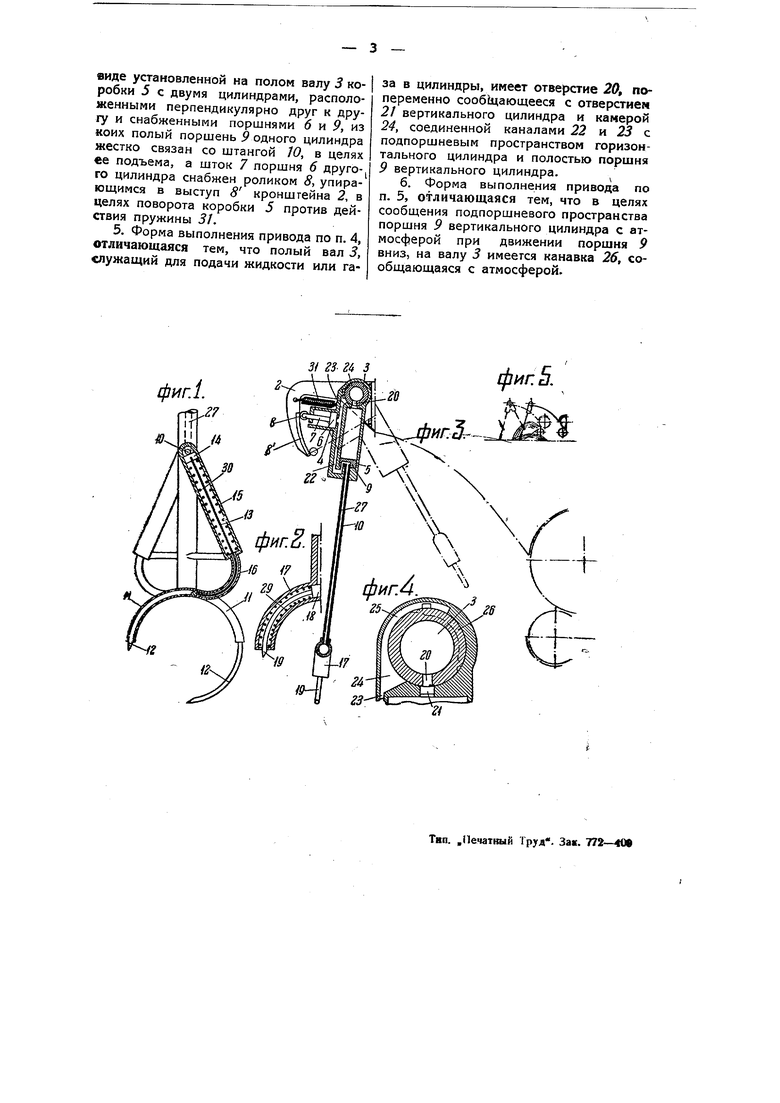
На чертеже фиг. 1 изображает обший вид захватов для подъема хлеба по первому варианту; фиг. 2 - устройство захватов по второму варианту; фиг. 3-общий вид предлагаемого приспособления с захватом по второму варианту; фиг. 4-детали приспособления; фиг. 5-схему действия приспособления.
В передней части комбайна укрепляются кронштейны 2, в подшипниках которых вращается полый вал 3.
На валу 3 подвешены коробки 5 с двумя цилиндрами в каждой, расположенными под прямым углом один к другому. Блоки подтянуты к кронштейнам 2 помощью пружины 3/ Порщень 6 цилиндра 4 несет шток 7, заканчивающийся роликом S, упирающимся в выступ 8 кронштейна 2. Пространство в цилиндре 4 влево от поршня б сообщается с атмосферой Поршень 9 цилиндра 5 несет полую штангу /О, канал 27 которой с помощью канала в поршне 9 сообщен с каналом 22, подводящим воздух к нижнему окну цилиндра 9. Цилиндры 4 и 5 соединены общим каналом 23 с камерой 24. Часть полого вала 3 является золотником, распределяющим рабочую среду через отверстие 20. Кроме отверстия 20 на валу имеется канавка 26 (показанная пунктиром на фиг. 4 для выпуска рабочей среды, постоянно сообщающаяся с атмосферой. Плоскость ее вращения смещена относитель-но плоскости вращения отверстия 20; вследствие этого она проходит попеременно то над каналом 25 камеры 24, то над отверстием 2/.
Полая поворотная штанга 10 несет захваты, состоящие в первом варианте (фиг. 1) из двух примыкающих одна к другой дугообразных направляющих //, в которых ходят соответственно изогнутые захваты J2, образующие при выходе из направляющих вместе с последними замкнутый кольцевой захват. Захваты /2 гибкими тягами /J соединены с поршнями 4, подпружиненными пружинами 30 и перемещающимися в цилиндрах /5. Тяги J3 помещены в криволинейных каналах 76. Во втором варианте захваты (фиг. 2 и 3) состоят из криволинейных трубок /7, в которых ходят в противоположных направлениях два поршня J8 со щтоками f9, подпружиненные пружинами 29. Трубки /7 соединены с каналами 27.
Схема работы приспособления такова. .На фиг. 3 показан один из органов приспособления в исходним положении, когда его захват выброшен вперед по ходу машины, опущен и сомкнут. Конец периода смыкания захвата совпадает с моментом начала подъема штанги Ю и отвода его вправо к рабочим органам комбайна. Крайнее правое положение показано пунктиром. Приход органа в это положение совпадает с размыканием захвата, после чего он, не опускаясь, в разомкнутом состоянии возвращается к крайнему левому положению и, только не доходя до него на малый угол, быстро опускается. После полного опускания вновь повторяется захват, подъем, отход в крайнее правое положение и т. д.
Полый вал вращается по направлению стрелки и кинематически связан с ходовым колесом. Поэтому движения за-хвата строго периодичнь и соответствуют проходимым машиной расстояниям.
На фиг. 5 показана кинематическая схема, иллюстрирующая работу приспособления.
Работа приспособления протекает сле.дующим образом. Рабочая среда из нашетательного устройства поступает в полость вала 5 и по мере его вращения соответственно распределяется по цилиндрам 4, 5 v( 17 с помощью отверстия 20. Когда последнее открывается в отверстие 21, канавка 26 соединяет камеру 24 с атмосферою помощью канала -25. Следовательно поршень 9 опустится, вытеснив воздух в атмосферу из цилиндра по канавкам 22, 23, 24, 25 и 26.
При определенном соотношении между скоростью вращения вала 3 и давлением рабочей среды поршень заканчивает свое опускание к моменту, когда -отверстие 20 соединяется с камерой 24, отверстие же 2/ остается пока закрытым, что предупреждает поднятие поршня 9. HJ камеры 24 рабочая среда, распространяясь по каналам 23, 22 и 27 и воздействуя на поршни 18, смыкает захват. Так как пружина 29 слабее пружины 31, последняя до конца работы поршней 18 остается сжатой. В конце -смыкания захвата канавка 26 подходит к -отверстию 21 и через канал 25 соединяет полость цилиндра 5 с атмосферой.
что и дает теперь возможность поршню 9 подняться кверху. Теперь рабочая среда, преодолевая силу пружины 57, выталкивает поршень 6, который и отводит вправо весь орган (как показано пунктиром).
Как только последний принимает крайнее правое положение, кчнавка 26 подходит к каналу 25 и сообщает камеру 24 с атмосферою. В то же время, отверстие 21 остается закрытым.
Следовательно поршень 9 не может опуститься и захват остается подтянутым кверху. В то же время, в силу того, что пружина 31 сильнее пружин 29, поршень 6 преодолевает остаточное давление в канале 23 и весь орган приходит с подтянутым захватом в крайнее левое положение.
За весь разобранный период работы отверстие 20, сделав попный оборот, подходит вновь к отверстию 2/, а канавка 26 соединяет камеру 24 через канал 25 с атмосферой. Следовательно, поршень 9 снова опускается, вытесняя воздух из цилиндра 5 по каналам 22, 23, 24, 25 и 26. Цикл вновь повторяется.
Предмет изобретения.
1.Приспособление к комбайнам и другим уборочным машинам для подъема полегшего хлеба, отличающееся применением парных изогнутых захватов 12, присоединенных к поворотным штангам 10, установленным на полом валу 3 с возможностью осевого перемещения при помощи пневматического или ти дравлического привода.
2.Форма выполнения приспособления по п. 1, отличающаяся тем, что захваты 12 прикреплены к подпружиненным поршням 18, помещенным в криволинейных направляющих трубках 77, соединенных с каналами 27 штанг 10 (фиг. 2).
3.Форма выполнения приспособления по п. 1, отличающаяся тем, что захваты 72 прикреплены к поршням 14 с помощью гибких тяг 13, помещенных в криволинейных каналах 16 (фиг. 1).
4.В приспоблении по пп. 1 - 3 гидравлический или пневматический привод для приведения в действие захватов и поворота несущей их штанги, отличающийся тем, что он выполнен в
виде установленной на полом валу 3 коробки 5 с двумя цилиндрами, расположенными перпендикулярно друг к другу и снабженными поршнями б и Р, из коих полый поршень Р одного цилиндра жестко связан со штангой W, в целях ее подъема, а шток 7 поршня 6 другого цилиндра снабжен роликом 8, упирающимся в выступ 8 кронштейна 2, в целях поворота коробки 5 против действия пружины 5/.
5. Форма выполнения привода по п. 4, отличающаяся тем, что полый вал 3, служащий для подачи жидкости или газа в цилиндры, имеет отверстие 20, попеременно сообЬцающееся с отверстием 2/ вертикального цилиндра и камерой 24, соединенной каналами 22 я 23 с. подпоршневым пространством горизонтального цилиндра и полостью поршня 9 вертикального цилиндра.
6. Форма выполнения привода по п. 5, отличающаяся тем, что в целях сообщения подпоршневого пространства поршня 9 вертикального цилиндра с атмосферой при движении поршня 9 вниз, на валу 3 имеется канавка 26, сообщающаяся с атмосферой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для зажигания рабочей смеси в двигателях внутреннего горения | 1937 |
|
SU55382A1 |
| Умывальник | 1935 |
|
SU47418A1 |
| Посадочная машина | 1936 |
|
SU50372A1 |
| Прибор для проверки размеров прямоугольных листовых заготовок | 1933 |
|
SU33690A1 |
| Способ планировки площадок | 1937 |
|
SU60115A1 |
| Устройство для снятия судов с мели | 1935 |
|
SU47559A1 |
| Устройство для снятия судов с мели | 1933 |
|
SU36848A1 |
| Умывальник | 1934 |
|
SU40539A1 |
| Корнерезка центробежного типа | 1933 |
|
SU43235A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНОЙ | 1970 |
|
SU268769A1 |
фиг.1. J/ гЗ- 24 3

