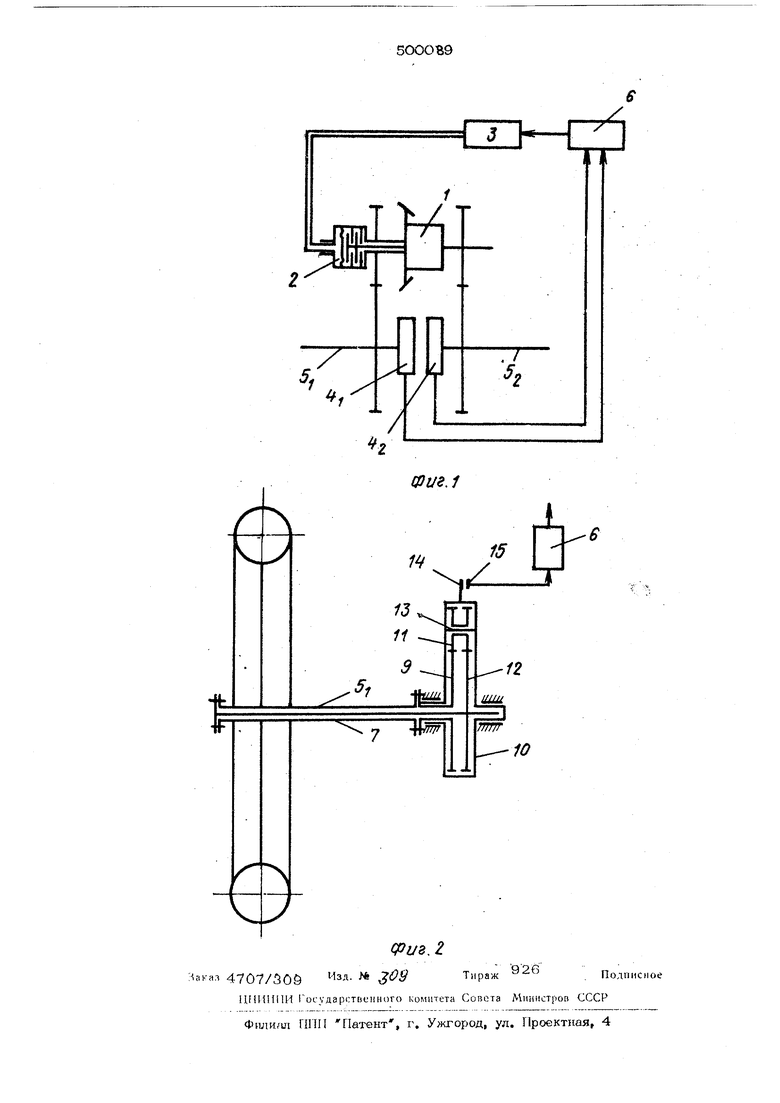
верстии полуоси 5 , соединенной одним концрм Сторцом полуоси, а другим концомс входным звеном дифференциального механизма-шестерней 8. Другое входное звено-шестерня 9 дифференциального механизма жестко соединяется с торцом противоположным наружному торцу полуоси 5. Шестерни 8 и 9 размешаются в корпусе 1О на подшипниках. С шестернями 8 и 9 находится в постоянном зацеплении блок шестерен 11 и 12, вращающихся на оси 13, I соединенной с корпусом 10. Корпус 10,явля 1 щийся выходным звеном дифференциального , механизма, свободно поворачивается на-;ивдш .никах. На корпусе ,10 установлен подвиж ; ный контакт управления 14. Неподвижный контакт 15 соединен с корпусом тргнспррт- него средства. Устройство работает следующим образом При движении транспортного средства с заблокированным дифференциалом по дороге с различными силами сцепления на колесах или при его поворотах полуось 5 испытывает повышенную закрутку. При этом поворачивается передаточный валик 7 относительно одного конца полуоси 5 на угол, равный ее закрутке. Вращающаяся с валиком 7 шестерня 8 дифференциального механизма получает дополнительный поворот (на угол закрутки полуоси) относительно вращающейся вместе с полуосью 5 шестерни 9. В связи стем, что шестерни 8 и 9 находятся -,1 в зацеплении с блоком шествре . ;11 и 12, поворот . шестерни 8 относительно шестерни 9 приводит к некоторому дополнительному обкатыванию шестерни 12 относительно шестерни 8, а следовательно, и шестерни 11 относительно шестерни-9. Поскольку шестерни 11 и 12 сблокированы, а такое обкатывание вызывает поворот на некоторый угол всего конуса 1О .в своих подшипниках. При перегрузках полуоси закрутка достигает значительной величины и поворот корпуса 10 окажется достаточным для замыкания контактов 14 и IS.KoHTaF.TH 14 и 15 датчиков перегрузки левой и правой полуосей ышючены параллельн в электрическую цепь исполнительного механ
6,воздействующего на устройство управления 3, Следовательно, перегрузка любой из осей приводит, к повороту соответствующего пуса 1О и замыканию контактов. При этом 55 происходит срабатывание исполнительнопо механизма 6, который включает устройство управления, и дифференциал разблоки1.)у-. .ется.
2. Система по п. 1, отличаюя с я тем, что устройство управления
ш а о исполнительным механизмом содержит шестеренчатый дифференциал, одно из звеньев . которого соединено с i датчиком перегру; ки, другое - с полуосью, а выходное звено жестко соединено с; подвижнг.гм конттактом управления. При появлении отрицательной закрутки полости 5 корпус 10 дифференциального механизма поворачивается в противоположную сторону и замыкает другую пару контактов, также включенную электрическую цепь исполнительного механизма 6 парал; рльно. И vB этом случае происходит раэI блокиршка;дифференциала. При прямолинейном движении трактора с одинаковыми значениями крутящего момента на полуосях скручивание их будея иметь практически одинаковую величину. Выключение блокировки дифференциала в этом слртае .происходит при появлении перегрузки, одной или одновременно обеих полуосей; Включение блокировки во всех случаях происходит автоматически после исчезнове перегрузок полуосей за счет выравнивания нагрузок действием дифференциала. Компенсация изменения скручиваемости полуосей 5 , вызванной установкой ведущих колес транспортного средства на другую, ширину колеи, осуществляется предваритель«) ным натягом (поворотом) передаточных аликов 7 или корпусов 10 на соответствующий УГОЛ. Формула изобретен ипя Система выключения блокировки дифференциала транспортного средства, содержащая блокирующую дифференциал фрикционную. муфту, датчики перегрузки, управляющие электроконтактным устройством, исполнительный механизм с устройством управления,, отличающаяся тем, что, с целью обеспечения ее автоматической работы при достижении предельно допустимого значения величины. крутящего момента на полуосях ведущего моста транспортногоо средства, датчики перегрузки состоят из валов, прикрепленных одним концом к наружному торцу одной из полуосей ведущего моста, а: другим концом соединенных через полуось , с устройством управления исполнительным механизмом,
cpve.l
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления блокируемым дифференциальным приводом колес транспортного средства и устройство для его осуществления | 1983 |
|
SU1130501A1 |
| Дифференциал транспортного средства | 1979 |
|
SU901092A1 |
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2548237C1 |
| ВЕДУЩИЙ МОСТ СИТКАРЕВА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2280568C2 |
| Ведущий мост транспортного средства | 1990 |
|
SU1701578A2 |
| Ведущий мост транспортного средства | 1984 |
|
SU1220947A1 |
| УНИВЕРСАЛЬНАЯ ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА С ПОСТОЯННОЙ ВЗАИМНОЙ БЛОКИРОВКОЙ | 2002 |
|
RU2236620C2 |
| Система управления блокировкой дифференциала ведущего моста колесного транспортного средства | 1990 |
|
SU1763256A1 |