Изобретение Относится к области весоизмерительной техники.
Известные микровесы, содержащие корпус, подвижную часть с грузоприемной чашкой, подвес подвижной части, гиренакладной механизм и компенсационный измеритель усилий, состоящий из фотоэлектрического датчика положения подвижной части, включающего в себя осветитель, отражатель и фотоприемник, усилителя и датчика силы плунжерного типа, не обеспечивают требуемой точности.
Для повышения точдости в предлагаемых микровесах отражатель выполнен в виде подвещенной в корпусе на наклонных растяжках многогранной зеркальной призмы, установленной на подвижной части, и плоских зеркал, закрепленных в корпусе параллельно граням нризмы, а подвес подвижной части выполнен в виде вертикальной цилиндрической пружины - торсиона, один конец которой заделан в подвижной части, а второй - через крутильную головку прикреплен к корпусу.
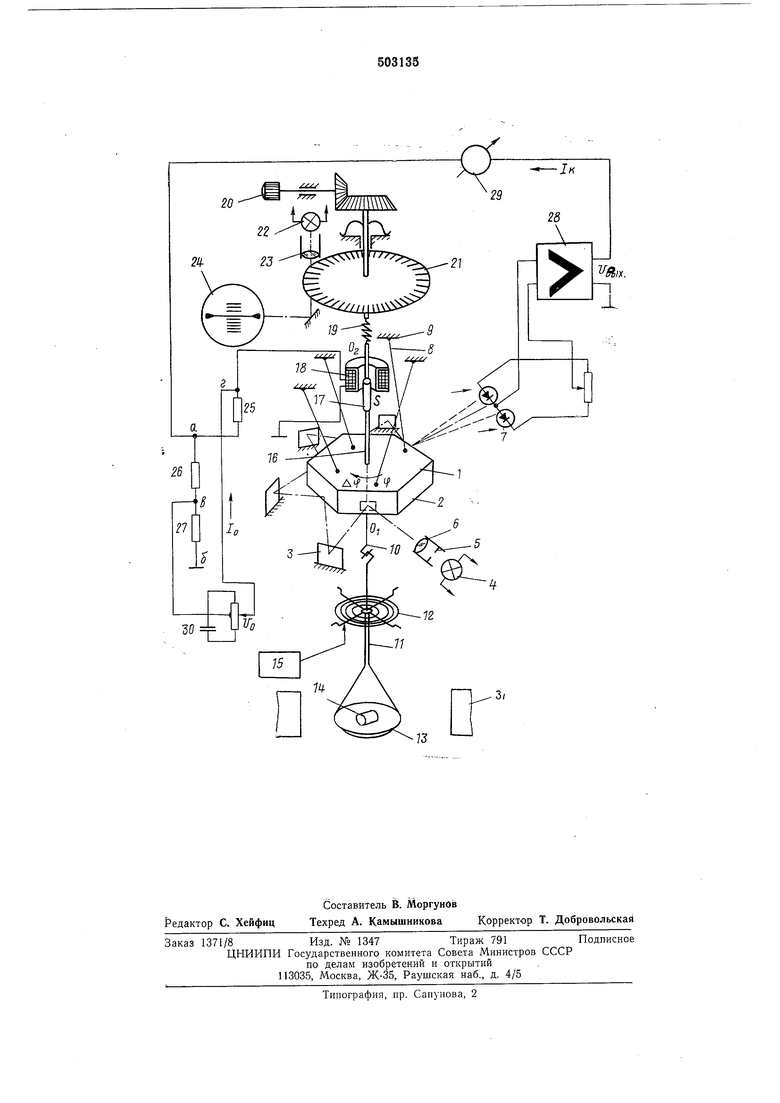
На чертеже представлена схема описываемых микровесов.
Элемент 1, выполненный в виде полого вращающегося многогранника, зеркальные поверхности 2 которого совместно с неподвижными зеркалами 3, лампой 4, диафрагмой 5, линзой 6 и фотопреобразователями 7 образуют систему развертывающего многократного
отражения (2-7), подвешен на наклонных растяжках 8, закрепленных на основании 9. В нижней части элемента 1 установлен крючок 10 для подвески 11 с кольцевыми гирями
12 и чащки 13 с исследуемым грузом 14. Съем и установка гирь 12 производится гиревым механизмом 15. По центральной оси элемента 1 на стержне 16 закренлён магнит 17 силового компенсатора плунжерного типа
(18 - его соленоид), связанный через цилиндрическую пружину - торсион 19 с крутильной головкой 20.
Верхний конец пружины - торсиона 19 жестко связан с микрощкалой 21, деления которой проецируются с помощью оптической системы 22-24 (22-лампа, 23 - оптическое устройство, 24 - экран). Солеиоид 18 включен в плечо мостовой схемы 25-27, к эквипотенциальным точкам а-б и я-г которой, соответственно, подключены выход усилителя 28 (через показывающий прибор 29) и выход источника 30 электрического сигнала t/o установки нулевой точки по току /о. Чашка 13 с грузом 14 находится в пространстве испытательной камеры или печи 31.
Устройство работает следующим образом.
На чашку 13 устанавливают груз 14 массой
Шх. Элемент 1, подвешенный на растяжках 8,
поворачивается, а система 2-7 многократного отражения фиксирует вращение на угол f.
Контроль отклонения элемента 1 ведут по прибору 29, который показывает наличие сигнала некомпенсации t/вых. При яомощи гиревого механизма 15 производят ступенчатый съем гирь 12 с подвески И, приблизительно равных по массе тх, а при помощи крутильной головки 20 путем закручивания пружины-торсиона 19 производят точную установку элемента 1 в начальное положение.
Указатель прибора 29 фиксируется на нулевой отметке.
Отсчет результата измерения массы гпх ведется по формуле:
/Ид. : ОТг + 5Пц,
где /П2 - масса гирь 12, снятых с подвески И;
S - цена деления микрошкалы 21; Лд - число делений, на которое была
закручена микрошкала 21. При включении испытательной камеры или печи 31 масса т изменяется на величину Am.
Чувствительный элемент 1 испытывает закручивание на малый угол относительно исходного положения, и на выходе усилителя 28 появляется компенсационный ток /к, который через мостовую схему поступает в соленоид 18, создавая уравновешивающее воздействие. Отсчет изменения по массе Д/п ведется по формуле:
Д/И k/K,
где К-постоянная компенсатора 17-18, определяемая при градуировке,
Формула изобретения
Микровесы, содержащие корпус, подвижную часть с грузоприемной чашкой, подвес подвижной части, гиренакладной механизм и компенсадионный измеритель усилий, состоящий из фотоэлектрического датчика положения подвижной части, включающего в себя осветитель, отражатель и фотоприемник, усилителя и датчика силы плунжерного типа, отличающиеся тем, что, с целью повышения точности, отражатель выполнен в виде
подвешенной в корпусе на наклонных растяжках многогранной зеркальной призмы, установленной на подвижной части, и плоских зеркал, закрепленных в корпусе параллельно гра-ням призмы, а подвес подвижной части выполней в виде вертикальной цилиндрической пружины - торсиона, один конец которой заделан в подвижной части, а второй - через крутильную головку прикреплен к корпусу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разбраковочные весы | 1979 |
|
SU783593A2 |
| Торсионные микровесы | 1987 |
|
SU1527508A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Устройство для измерения массы | 1977 |
|
SU645034A1 |
| Весы | 1982 |
|
SU1143986A1 |
| Механизм гиреналожениябОльшЕгРузНыХ BECOB | 1978 |
|
SU794394A1 |
| Весы | 1990 |
|
SU1760359A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |