1
Изобретение относится к области весоизмерительной техники.
Известны весодозирующие устройства, содержаш,ие уиругий элемент, преобразователь линейного иеремещения, электромагнитный зажим с упруго деформируемыми рабочими сторонами и вторичный прибор.
Эти устройства не обеспечивают требуемую точность и надежность.
Для повышения точности и надежности в предлагаемом устройстве рабочие стороны магнитопровода электромагнитного зажима выполнены с утонениями, закрытыми оболочками из эластичного материала, а полости между оболочками и магиитопроводом занолнеиы магнитной жидкостью.
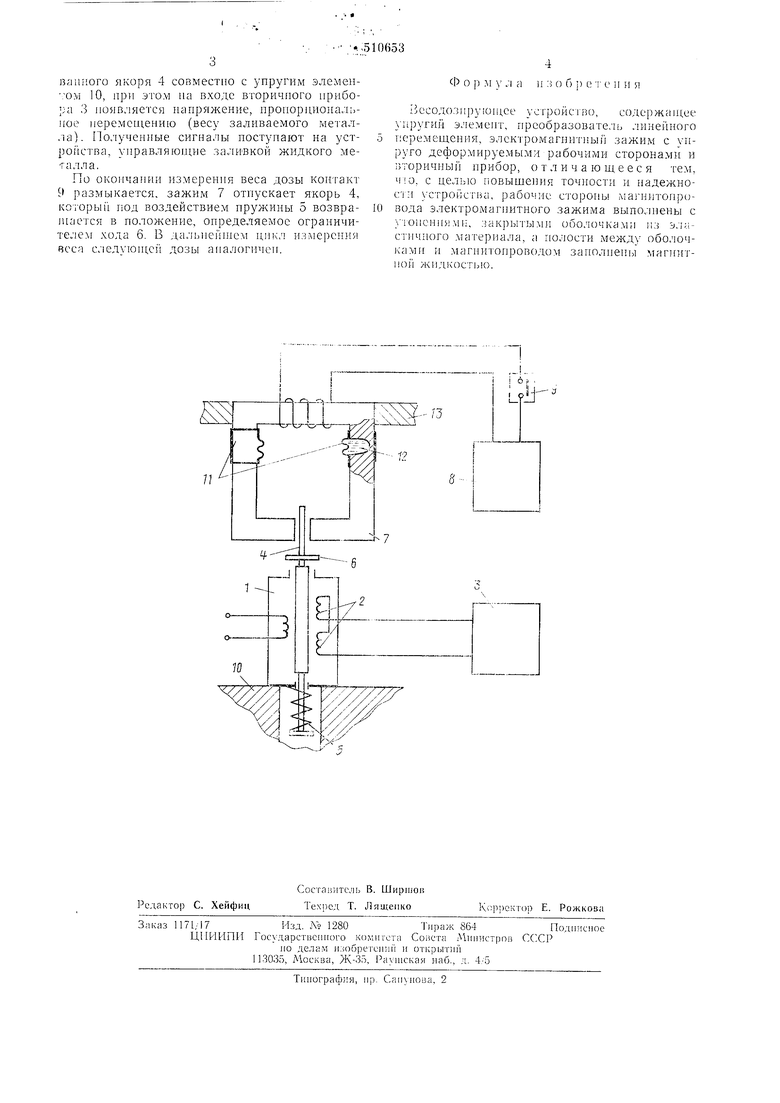
На чертеже показана схема описываемого устройства, содержащего в качестве преобразователя перемендения, например, цилиндрический индуктивный дифференциальный датчик линейного перемещения, включающий основание (статор) 1 с обмотками 2, подключенными к вторичному нрибору 3, и якорь 4, ноднружипепный пружиной 5 и имеющий ограничитель хода 6. Свободный конец якоря 4 установлен между нолюсами электромагнитного зажима 7, который подключается к источнику питання 8, посредством нормального разомкнутого контакта 9. Статор 1 датчика
жестко скреплен с упругнм элементом 10 весового механизма.
Л1агнитопровод зажима 7 выполнен в виде С-образной скобы, имеющей не менее одного утонения, закрытого оболочкой II из эластичного материала, а иолость .между магпитонроводом и оболочкой 11 заполнена магннтной жидкостью 12.
Зажим 7 закрепляется на детали 13, не подверженной деформациям н перемещениям.
Устройство работает следующнм образом. В ;сходно.м состоянии электрохмагнптный зажим 7 отключен от источника питания 8, и якорь 4 под воздействием пружины 5 устанавливается в положение, соответствующее нулевому выходному сигналу. Первоначальная настр011ка положения якоря 4 осуществляется изменением места крепления ограничителя хода якоря 4. Под воздействием веса тары упругий элемепт 10 перемещается относительно зажима 7. Вместе с ним перемещается п преобразователь линейного неремещення - индуктивный датчик со статором 1 и якорем 4. Сигнал на выходе преобразователя соответствует нулевому уровню.
Перед взвещиваннем материала включается контакт 9, и якорь 4 фиксируется электромагнитным зажнмом 7.
Далее статор 1 датчика во время заливки метсч-ла перемещается относительно фиксиро3
п,П1иого якоря 4 совместно с упругим элемен;ом 10, при этом на входе вторичного нрибора 3 появляется напряжение, нронорниональиое перемещению (весу заливаемого металла). Полученные сигналы поступают на устройства, управляюн1,ие заливкой жидкого металла.
По окончании измерения веса дозы контакт 9 размыкается, зажим 7 отпускает якорь 4, которы пол воздействием пружины 5 возвращается в положение, определяемое ограничителем .кода 6. В дальнсГпнем измерения веса с:1едуюн1;е1 1 дозы аналогичен.
Ф о 1 м у ;i а и :s о б р е i е н н л
.Зесодозиру10Н,ее устройство, содержан|,ее иругнй элемент, преобразователь .iHHeiiHoro пе)е.меш,ения, электромагнитны зажим с упруго деформируемыми рабочими сторонами и вторичный нрибор, отличающееся тем, , с целью повышения точности и надежности устройспи, рабочие стороны магиитонровода электромагнитного зажима выполнены с ;/то11СН11ял1и, зак)ытымн оболочками э. ;;стнчного .материала, а полости между обо.чочкамп и .магинтоироводом заполиен, магнитной КНДКОСТ1)К).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1992 |
|
RU2057301C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАШИН УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2454777C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Тензометр | 1990 |
|
SU1719883A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО КОНТРОЛЯ ДИАМЕТРОВ ДЕТАЛЕЙ | 1991 |
|
RU2023580C1 |
| Весоизмерительное устройство | 1983 |
|
SU1114895A1 |
| ЛИНЕЙНЫЙ ЦИЛИНДРИЧЕСКИЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2454778C1 |
| Шаговый двигатель | 1980 |
|
SU920904A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ НА УСТАЛОСТЬ | 2021 |
|
RU2781466C1 |
