Изобретение относится к микросистемной технике, в частности к микроробототехнике, и может быть использовано в исполнительных устройствах роботов при манипулировании микрообъектами сложных конфигураций и сыпучих материалов, например в космической технике, для забора проб грунта планет, комет и других небесных тел.
Известен схват робота, содержащий корпус и губки, губки выполнены в виде баллона из эластичного тонкостенного материала и снабжены датчиками усилия зажима (захвата) объекта. Схват содержит корпус, губки, датчики с проводами (RU 94000972 [1]). Недостатком данного устройства является необходимость использования внешнего источника избыточного давления. Кроме того, эластичный тонкостенный материал может быть легко поврежден при контакте с заостренными гранями микрообъектов, имеющих сложную конфигурацию.
Известен схват микроманипулятора, который содержит основу схвата, кисть схвата, упругодеформируемые зажимные пальцы, привод и тягу. Привод выполнен в виде линейного электромагнитного двигателя, содержащего якорь из ферромагнитного материала и электромагнит с единственной системой обмоток, обеспечивающих возможность одностороннего прямого рабочего хода привода. Тяга выполнена в виде выдвижного звена с трубчатым концом. Якорь линейного электромагнитного двигателя жестко соединяет основу схвата с кистью, к которой жестко закреплены зажимные пальцы, связанные между собой возвратной пружиной. Система обмоток электромагнита установлена в выдвижном звене, расположенном коаксиально с якорем и кистью. Звено обладает возможностью возвратно-поступательного перемещения. Величина внутреннего диаметра трубчатого конца звена выбирается так, что выдвижное звено и пальцы находятся в постоянном силовом противодействии (RU 2259915 [2]). Недостатками известного устройства являются его ограниченные функциональные возможности из-за того, что зажимные элементы перемещаются в одной плоскости и обеспечивают фиксацию предмета манипулирования сложных конфигураций только в двух точках. Кроме того, высока вероятность электромагнитных наводок от электромагнитного двигателя на объекты микросреды.
Известно захватное устройство, предназначенное для удержания и микропозиционирования миниатюрных механических деталей и электронных компонентов. Пьезоэлектрический схват содержит два пальца, выполненные в виде биморфных пьезоэлектрических актюаторов, закрепленных на корпусе и подключенных к управляющему устройству. Управляющее устройство содержит микроконтроллер, подключенный через порт связи к ЭВМ верхнего уровня, и цифроаналоговые преобразователи, которые подключены к каждому биморфному пьезоэлектрическому актюатору отдельно. Каждый палец содержит емкостной датчик, выполненный в виде закрепленной на корпусе параллельно пальцу диэлектрической пластины с металлизированной поверхностью, разделенной на два равных электрода, подключенных к ЭВМ верхнего уровня через преобразователь сигналов датчиков (RU 2529126 [3]). Недостатками известного устройства являются его ограниченные функциональные возможности из-за того, что зажимные элементы перемещаются в одной плоскости и обеспечивают фиксацию предмета манипулирования сложных конфигураций только в двух точках.
Известно наноструктурное захватное устройство для манипулирования микрообъектами, изготовленными из электропроводящих материалов, содержащее основание, крепежное приспособление, рабочую поверхность из наноструктурного материала, при этом основание выполнено из электропроводящего материала и изолировано от рабочей поверхности диэлектриком (RU 2423223 [4]). Недостатком известного устройства является ограниченность его применения, поскольку в основу принципа действия устройства при реализации операций захвата и удержания микрообъектов заложены межмолекулярные силы Ван-дер-Ваальса, и при этом предполагается, что микрообъекты изготовлены из электропроводящих материалов. Особенно эффективно устройство при работе с микрообъектами, которые полностью или частично (поверхность) изготавливаются из наноструктурных металлических материалов, что не всегда выполняется при работе с материалами естественного, а не искусственного происхождения.
Известно микромеханическое устройство, включающее два плоских элемента, вытянутых вдоль оси устройства, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из сплава с эффектом памяти формы, а другой - из упругого материала, причем слои прочно соединены между собой. Плоские элементы соединены с одного конца устройства, а с другого конца сформирован захват для удержания объекта манипулирования, выполненный в форме прямоугольных призм. При этом в термочувствительном элементе упругий слой выполнен в виде пленки упругого материала, нанесенной на слой сплава с эффектом памяти формы с псевдопластической деформацией растяжения вдоль оси устройства, а захват для удержания объекта сформирован в слое сплава с эффектом памяти формы (RU 2458002 [5]). Недостатками известного устройства являются его ограниченные функциональные возможности из-за того, что зажимные элементы перемещаются в одной плоскости и обеспечивают фиксацию предмета манипулирования сложных конфигураций только в двух точках.
Наиболее близким к заявляемому по своей технической сущности является микромеханическое устройство, включающее упругий элемент двумерной конфигурации и элемент с эффектом памяти формы, термоупругий мартенситный переход которого управляется внешним полем, выполненный в двумерной конфигурации, прочно механически соединенные друг с другом плоской стороной. Упругий элемент выполнен в виде множества отдельных элементов, которые прочно присоединены своей плоской стороной с разных сторон к элементу с эффектом памяти формы. При этом в качестве элемента с эффектом памяти формы использован элемент, имеющий одностороннюю память формы растяжения или сжатия, а соединение упругого элемента и элемента с памятью формы осуществлено при значениях внешних параметров и внешнего поля, отвечающих мартенситному состоянию элемента с памятью формы (RU 2305874 [6]).
Недостатком известного устройства являются его относительно ограниченные функциональные возможности из-за того небольшого набора геометрических форм, которые оно принимает в результате деформации входящих в его состав элементов, а также ограниченный диапазон деформаций.
Заявляемый в качестве изобретения микросистемный захват направлен на расширение функциональных возможностей за счет принятия им разнообразных форм, позволяющих ему при использовании в качестве рабочего органа робота манипулировать микрообъектами сложных конфигураций и сыпучими материалами.
Указанный результат достигается тем, что микросистемный захват содержит двумерную деформируемую структуру и средства управления деформацией, при этом деформируемая структура выполнена в виде гибкой оболочки, снабженной матрицей деформируемых элементов, каждый из которых снабжен индивидуальным средством управления деформацией.
Указанный результат достигается также тем, что деформируемые элементы выполнены в виде биморфных актюаторов, а средства индивидуального управления деформацией в виде нагревательных элементов.
Указанный результат достигается также тем, что биморфные элементы выполнены в виде тепловых микромеханических актюаторов.
Указанный результат достигается также тем, что деформируемые элементы выполнены в виде микромеханических актюаторов из биметаллических элементов.
Указанный результат достигается также тем, что деформируемые элементы выполнены в виде микромеханических актюаторов из материалов с обратимым эффектом памяти формы, а средства индивидуального управления деформацией в виде нагревательных элементов.
Указанный результат достигается также тем, что деформируемые элементы выполнены в виде микромеханических пленочных пьезоэлектрических актюаторов, а средства индивидуального управления деформацией в виде электродов, соединенных с источником напряжения.
Отличительными признаками заявляемого изобретения являются:
- выполнение двумерной деформируемой структуры в виде гибкой оболочки, снабженной матрицей деформируемых элементов, каждый из которых снабжен индивидуальным средством управления деформацией;
- выполнение деформируемых элементов в виде биморфных актюаторов, а средства индивидуального управления деформацией в виде нагревательных элементов;
- выполнение биморфных элементов в виде тепловых микромеханических актюаторов;
- выполнение биморфных элементов в виде микромеханических актюаторов из биметаллических элементов.
- выполнение деформируемых элементов в виде микромеханических актюаторов из материалов с обратимым эффектом памяти формы, а средства индивидуального управления деформацией в виде нагревательных элементов;
- выполнение деформируемых элементов в виде микромеханических пленочных пьезоэлектрических актюаторов, а средства индивидуального управления деформацией в виде электродов, соединенных с источником напряжения.
Выполнение деформируемой структуры в виде гибкой оболочки, снабженной матрицей деформируемых элементов, каждый из которых снабжен индивидуальным средством управления деформацией, позволяет расширить функциональные возможности за счет принятия захватом разнообразных форм, позволяющих ему при использовании в качестве рабочего органа робота манипулировать микрообъектами сложных конфигураций и даже сыпучими материалами.
В данном случае каждый элемент начинает выполнять функцию привода и обеспечивать любое заданное изменение формы оболочки при приложении внешнего воздействия. Таким воздействием может являться нагрев, подведение электрического потенциала, пропускание тока и т.д.
Действительно, если в исходном состоянии предлагаемый захват (рабочий орган) является плоским (может выполнять функцию скребка, лопатки), то при подаче управляющего воздействия на отдельные элементы они будут деформироваться, например, изгибаясь вверх, и рабочий орган примет форму ковша, захвата и может принять любую сложную форму. Все будет зависеть от поставленной задачи и числа деформируемых элементов в матрице.
В частных случаях реализации возможно выполнение каждого деформируемого элемента в виде микромеханических биморфных актюаторов, т.е. составленных из двух элементов, один из которых под внешним воздействием будет расширяться, а другой - сжиматься, что приводит к изгибу такого устройства. Соответственно, в зависимости от поставленных задач и наличия соответствующих комплектующих возможно использование различных биморфных актюаторов - тепловых (например, микромеханических актюаторов, известных из RU 2448896 [5] или биметаллических, известных из RU 2417878).), на основе материалов с обратимым эффектом памяти формы (RU 2259914, 2367573), пьезоэлектрических (RU 2175601).
В случае использования биморфных элементов в виде тепловых микромеханических актюаторов индивидуальным средством управления деформацией будет являться нагрев элемента за счет нагревателя, которым он снабжен. Из-за разности КТР составляющих его элементов будет происходить деформация актюатора (изгиб).
При использовании актюаторов на основе материалов с обратимым эффектом памяти формы индивидуальным средством управления деформацией будет нагрев элемента, который может быть осуществлен с помощью нагревателя, его охватывающего.
При использовании актюаторов в виде биморфных пленочных пьезоэлементов индивидуальным средством управления деформацией будет подаваемое на элемент электрическое напряжение. В этом случае биморфный актюатор представляет собой две пленки диэлектрика, склеенные между собой таким образом, что вектора поляризации каждой из них направлены в противоположные стороны. Если подать напряжение на электроды, то одна из пленок будет расширяться, а другая - сжиматься, что приведет к изгибу всего элемента.
Использование перечисленных выше вариантов реализации актюаторов позволяет существенно снизить вес и размеры захвата, а учитывая, что рабочий диапазон их использования простирается от температур жидкого азота и до 250-350°С, это позволяет использовать манипулятор в составе мобильных роботов при работе в условиях открытого космоса и осуществлении напланетных миссий.
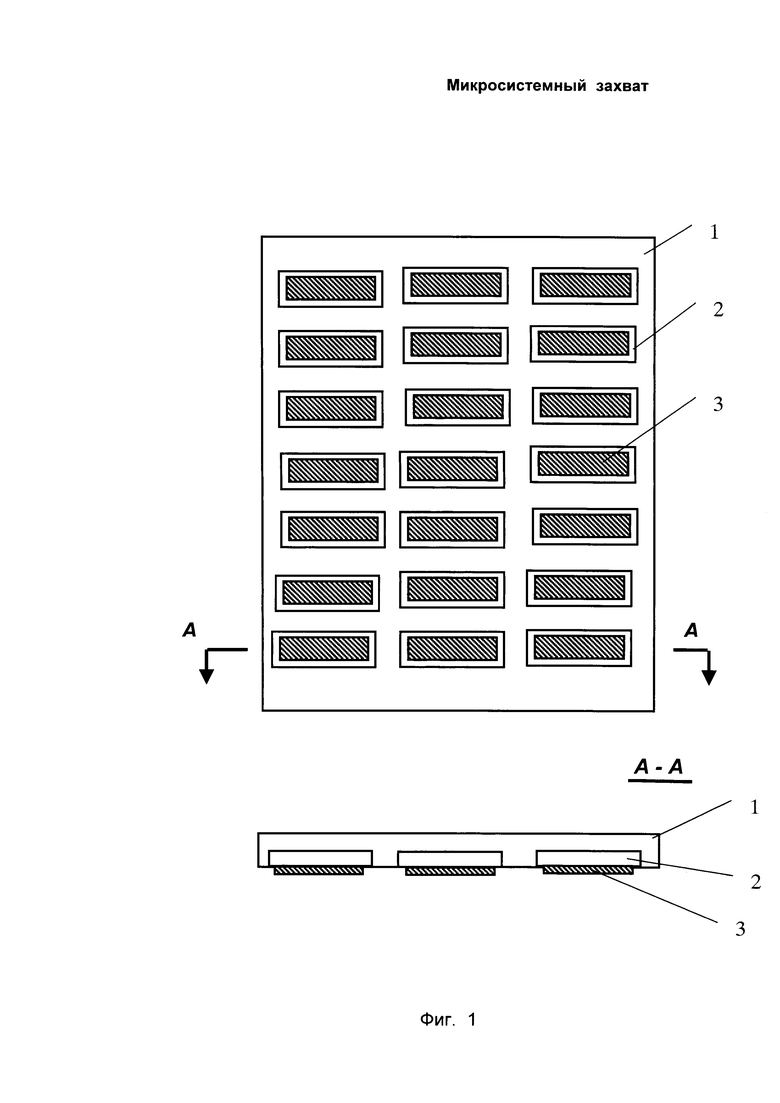
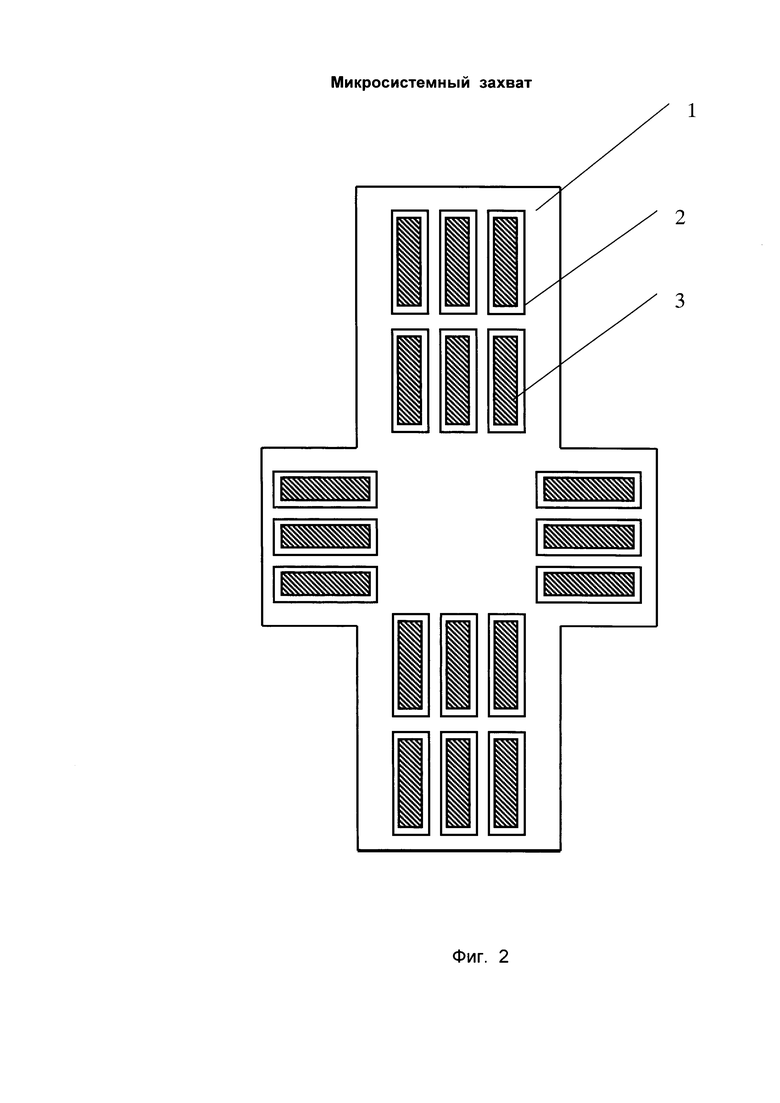
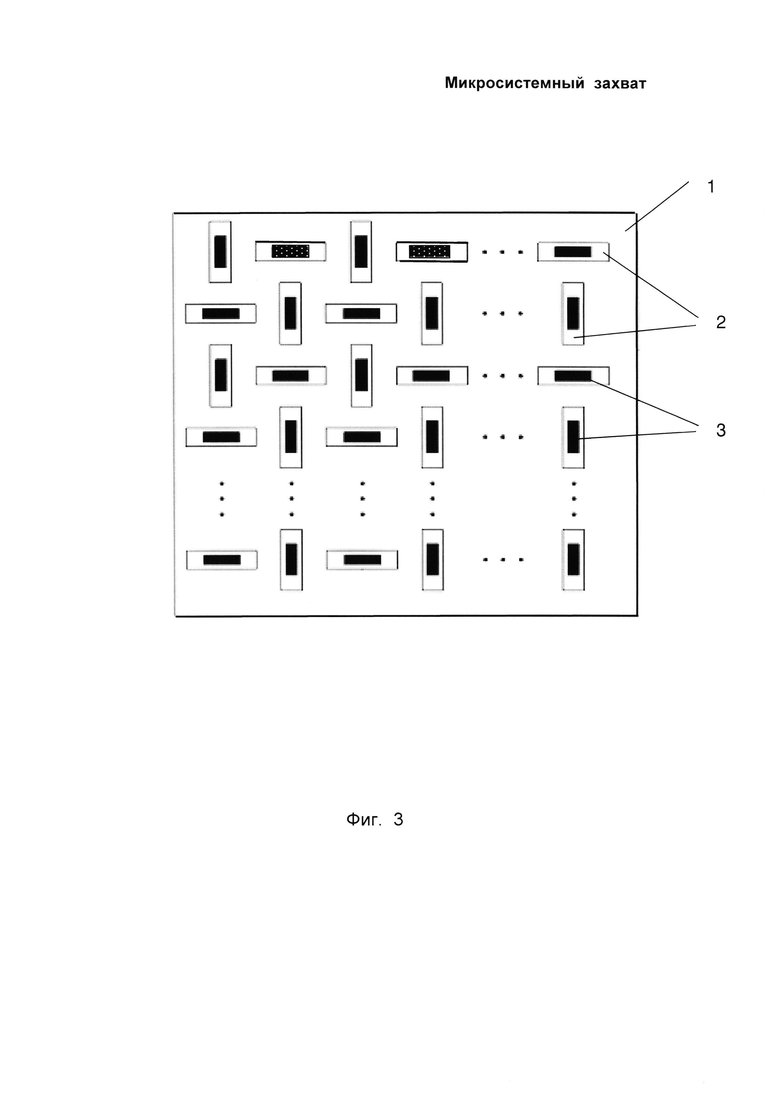
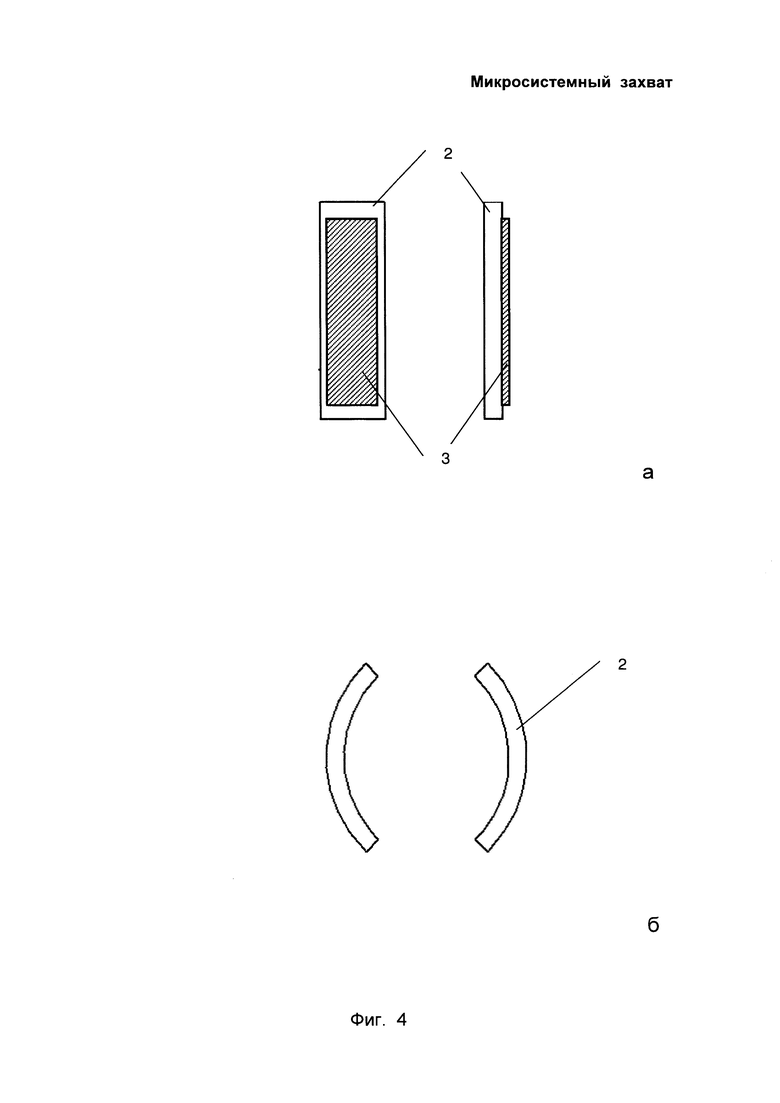
Сущность заявляемого захвата поясняется примером реализации и чертежами, на которых схематично представлено заявляемое устройство. На фиг. 1, 2 и 3 представлены варианты реализации устройства с различной геометрией расположения деформируемых элементов. На фиг. 4 представлено изображение одного отдельно взятого деформируемого элемента в исходном состоянии (а) и подвергшегося деформации (б).
Устройство содержит не показанную на чертежах систему управления, которая может быть выбрана либо из числа известных, либо в качестве таковой может быть использован компьютер, снабженный соответствующим программным обеспечением.
Устройство содержит двумерную (например, плоскую в исходном состоянии), гибкую оболочку 1, снабженную матрицей из деформируемых под внешним воздействием элементов 2, каждый из которых снабжен индивидуальным средством управления деформацией 3. В качестве источника внешнего воздействия могут выступать резистивные нагреватели, соединенные с источниками тока, или электроды, соединенные с источником напряжения, в зависимости от типа используемых биморфных актюаторов.
Гибкая оболочка может быть выполнена из любых известных и подходящих под заданные условия эксплуатации материалов. Деформируемые элементы могут быть закреплены на поверхности оболочки, впрессованы в нее или изготовленными с оболочкой за одно целое. Геометрия расположения деформируемых элементов на оболочке (или в оболочке) определяется задачами, стоящими перед устройством.
Устройство функционирует следующим образом. Захват (рабочий орган) закрепляется на манипуляторе известными методами. При подаче сигнала на один из деформируемых элементов либо на выбранный набор деформируемых элементов происходит их деформация и, как следствие, изменение кривизны всей оболочки, которую они составляют.
Например, вариант, представленный на фиг. 1, может принимать форму схвата, вариант, представленный на фиг. 2, может принимать форму ковша, а на фиг. 3 - любую сложную форму.
Таким образом, возможно локально контролировать форму оболочки путем выборочного воздействия на те или иные деформируемые элементы. Также возможен вариант, когда часть деформируемых элементов выполнены таким образом, что деформация изгиба происходит в противоположном направлении, это значительно расширяет функционал устройства. Контролируя количество деформируемых элементов в рядах и строках матрицы, их размер, а также расстояние между ними, можно задать произвольную форму оболочке и подстроить систему под конкретную область применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ С ФУНКЦИЕЙ ХРАНЕНИЯ | 2018 |
|
RU2678699C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2018 |
|
RU2713527C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2013 |
|
RU2529126C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698570C1 |
| МЕХАТРОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2010 |
|
RU2425747C1 |
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР | 1999 |
|
RU2172239C2 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
Изобретение относится к микросистемной технике, в частности к микроробототехнике, и может быть использовано в исполнительных устройствах роботов при манипулировании микрообъектами сложных конфигураций и сыпучих материалов, например, в космической технике, для забора проб грунта планет, комет и других небесных тел. Микросистемный захват содержит двумерную деформируемую структуру и средства управления деформацией. Деформируемая структура выполнена в виде гибкой оболочки, снабженной матрицей деформируемых элементов в виде актюаторов, каждый из которых снабжен средством для индивидуального управления деформацией. Деформируемые элементы выполнены в виде биморфных актюаторов, а средства для индивидуального управления деформацией - в виде нагревательных элементов. Изобретение направлено на расширение функциональных возможностей за счет принятия микросистемным захватом разнообразных форм, позволяющих ему при использовании в качестве рабочего органа робота манипулировать микрообъектами сложных конфигураций и сыпучими материалами. 5 з.п. ф-лы, 4 ил.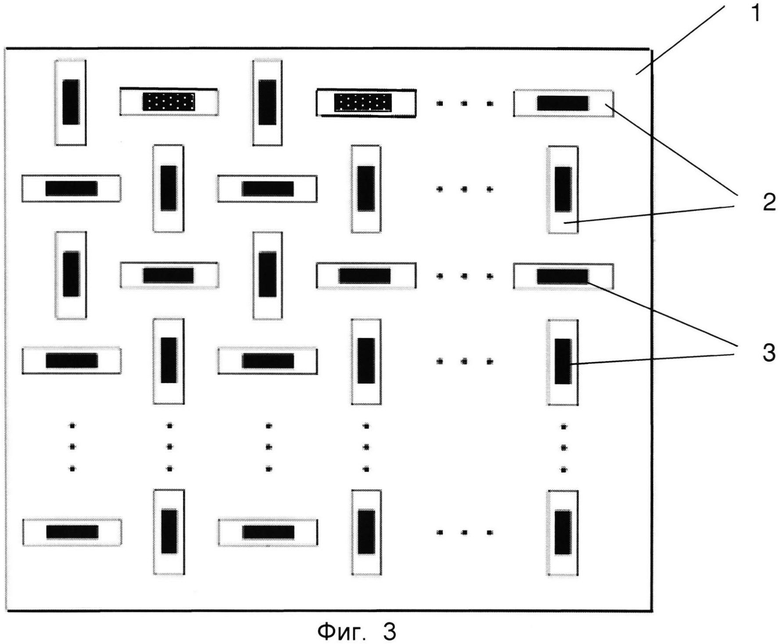
1. Микросистемный захват, содержащий двумерную деформируемую структуру и средства управления деформацией, отличающийся тем, что деформируемая структура выполнена в виде гибкой оболочки, снабженной матрицей деформируемых элементов в виде актюаторов, каждый из которых снабжен средством для индивидуального управления деформацией.
2. Микросистемный захват по п. 1, отличающийся тем, что деформируемые элементы выполнены в виде биморфных актюаторов, а средства для индивидуального управления деформацией - в виде нагревательных элементов.
3. Микросистемный захват по п. 2, отличающийся тем, что биморфные актюаторы выполнены в виде тепловых микромеханических актюаторов.
4. Микросистемный захват по п. 1, отличающийся тем, что деформируемые элементы выполнены в виде микромеханических актюаторов из биметаллических элементов.
5. Микросистемный захват по п. 1, отличающийся тем, что деформируемые элементы выполнены в виде микромеханических актюаторов из материалов с обратимым эффектом памяти формы, а средства для индивидуального управления деформацией - в виде пленочных нагревательных элементов.
6. Микросистемный захват по п. 1, отличающийся тем, что деформируемые элементы выполнены в виде микромеханических пленочных пьезоэлектрических актюаторов, а средства для индивидуального управления деформацией - в виде электродов, соединенных с источником напряжения.
| АКТЮАТОР, СИСТЕМА АКТЮАТОРОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2305874C2 |
| CN 2761377 Y, 01.03.2006. | |||

