ныё устройства 19, изолирующие прокладки 20 и регистрирующую электроаппаратуру 21.
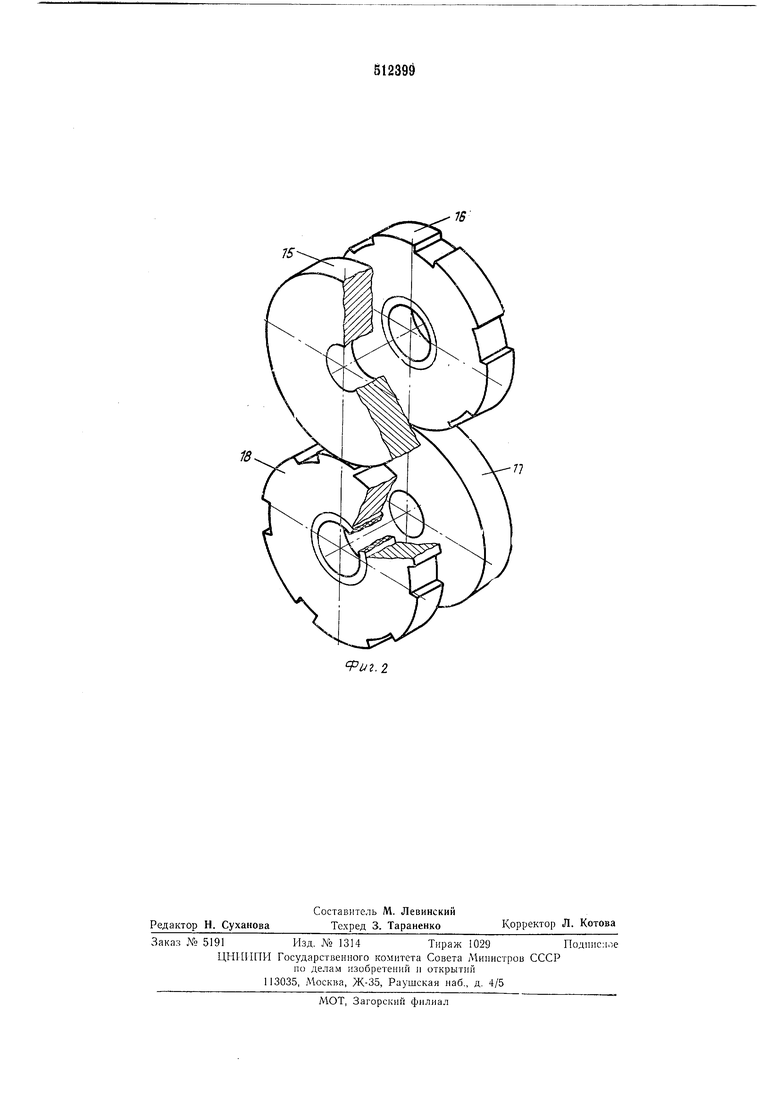
Моделирующие ролики выполнены одинакового диаметра, причем два ролика 16 и 18 - с прерывистыми контактными дорожками. Ролики с прерывистыми контактными дорожками установлены на изолирующих прокладках на валах 14, соосных с водилами.
Ролики 15, 18 и 16, 17 образуют два электрических контура, подключенных к регистрирующей электроаннаратуре.
Предлагаемая роликовая машина работает следующим образом.
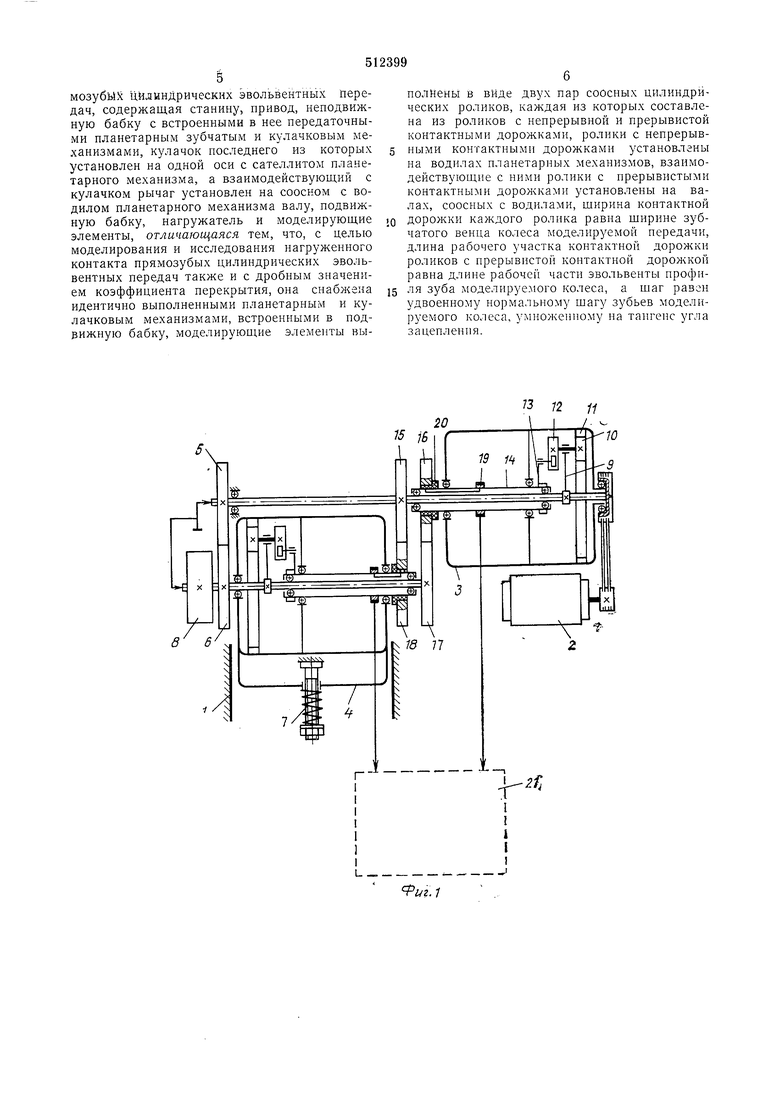
От привода (электродвигателя постоянного тока) через клиноременную передачу вращение передается на водило неподвижной бабки, несущее ролики 15, и через смепные колеса 5 и 6 - на водило подвижной бабки, несущее ролик 17.
Водила, а следовательно, и моделирующие ролики 15 и 17 вращаются с постоянной скоростью, пропорциональной скорости вращения колес моделируемой зубчатой передачи.
При вращении водил установленные на них сателлиты 10 обкатываются по эпициклическим колесам 11. Вместе с сателлитами вращаются и кулачки 12, установленные на одних осях с сателлитами. Кулачки воздействуют на рычаги 13, установленные жестко на валах 14, несущих ролики 16 и 18. Последние в отличие от роликов 15 и 17 вращаются с переменной скоростью. Закон ее изменения задается профилями кулачков и должен обеспечивать относительное перемещение сопряженных роликов 15, 18 и 16, 17 аналогичное относительному перемещению сонряженных зубьев колес моделируемой передачи.
В случае, если радиус - вектор кулачков постоянен, возможно чистое качение моделируемых роликов без относительного проскальзывания, что соответствует контакту зубьев моделируемых колес в полюсе зацепления.
При переменном радиусе-векторе кулачков рычаги перемещают валы 14 относительно водил, т. е. {тмеет место качение роликов со скольжением, что соответствует контакту зубьев моделируемых колес в дополюсной или заполюсной зоне зацепления.
Угол качания рычагов 13 заве11 угловому Hiary рабочих участков контактных дорожек роликов 16 и 18, а число качений за один оборот моделируюпщх роликов равно числу рабочих участков на контактной дорожке ролика 16 или 18.
Усилие прижатия моделируюи1,их роликов устанавливается и регулируется нагружатслем 7, воздействующим на подвижную бабку.
Каждая из нары сопряженных роликов моделирует передачу с коэффициентом перекрытия меньшим единицы, и обе пары при соединении электрических сигналов, ноступающих от каждой нз них, моделируют передачу с коэффициентом перекрытия, большим едипицы.
Усиливая н регистрируя электрические
сигналы, пОступаЮЩ.ие от каждой пары роликов, можно наблюдать продолжительность контакта рабочих участков роликов и регистрировать толщину масляных пленок в зонах
контакта и величину коэффициента перекрытия рабочих участков контактных дорожек.
Для обеснечения повторяемости снимаемых характеристик зацепления на каждый оборот роликовая машина используется для моделирования передач с передаточным отношением, равным единице.
Параметры моделирующих роликов определяются по следующим зависимостям.
Длина рабочего участка контактной дорожки роликов с прерывистой контактной дорожкой:
5 2r(iga,, - tgoo, ),
где а„ - угол профиля эвольвенты в конечной точке рабочего участка эвольветы нрофиля зуба колеса; ам-угол зацепления; Гв - радиус основной окружности. Шаг рабочих участков контактной дорожки моделирующих роликов с прерывистой контактной дорожкой:
Р р 2я m cosa- tga ,
где а -угол профиля зуба делительный; т - модуль зацепления.
Диаметр контактной дорожки ролика:
d ш-г cosa tga « ,
где Z - число зубьев колес моделируемой передачи.
Длина контактной дорожки ролика:
/ л Z cosa tga а.
Число рабочих участков на контактной доожке ролика с прерывистой контактной дорожкой:
2 - - г Рр2
Относительное перемещение сопряженных оликов:
/2 .-г2 -I-2г2 tga .tgftx-2гв
д а Xв ш °
где Гх - радиус окружности ведущего колеса, проходящий через текущую точку 55контакта сопряженных профилей;
а -радиус окружности вершин зубьев
колеса моделируемой передачи; а -угол нрофиля эвольвенты зуба ведущего колеса в текущей точке кон60такта.
Формула изобретения
Роликовая машина для моделирования и 65 исследования нагруженного контакта прямозубь1)( цилиндрических эвольвентных передач, содержащая станину, привод, неподвижную бабку с встроенными в нее передаточными планетарным зубчатым и кулачковым механизмами, кулачок последнего из которых установлен на одной оси с сателлитом планетарного механизма, а взаимодействующий с кулачком рычаг установлен на соосном с водилом планетарного механизма валу, подвижную бабку, нагружатель и моделирующие элементы, отличающаяся тем, что, с целью моделирования и исследования нагруженного контакта прямозубых цилиндрических эвольвентных передач также и с дробным зпачением коэффициента перекрытия, она снабжена идентично выполненными планетарным и кулачковым механизмами, встроенными в подвижную бабку, моделирующие элементы выполнены в виде двух пар соосных цилиндрических роликов, каждая из которых составлена из роликов с непрерывной и прерывистой контактными дорожками, ролики с непрерывными контактными дорожками установлены на воднлах планетарных механизмов, взаимодействующие с ними ролики с прерывистыми контактными дорожками установлены на валах, соосных с водилами, ширина контактной дорожки каждого ролика равна ширине зубчатого венца колеса моделируемой передачи, длина рабочего участка контактной дорожки роликов с прерывистой контактной дорожкой равна длине рабочей части эвольвенты профнля зуба моделируемого колеса, а шаг равен удвоенному нормальному шагу зубьев моделируемого колеса, умноженному на TainxMic угла зацепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликовая машина для моделирования и исследования нагруженного контакта цилиндрических прямозубых эвольвентных передач | 1981 |
|
SU970171A1 |
| Роликовая машина для моделирования и исследования нагруженного контакта цилиндрических прямозубых эвольвентных передач | 1974 |
|
SU534666A2 |
| ЗУБЧАТОЕ ЗАЦЕПЛЕНИЕ ВАХРУШЕВЫХ | 2009 |
|
RU2396473C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОТИВОЗАДИРНОЙ СТОЙКОСТИ ЗУБЬЕВ ЭВОЛЬВЕНТНОЙ ЦИЛИНДРИЧЕСКОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ | 2007 |
|
RU2334210C1 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2005 |
|
RU2298680C2 |
| ЗАЦЕПЛЕНИЕ КОЛЕС С КРИВОЛИНЕЙНЫМИ ЗУБЬЯМИ (ВАРИАНТЫ) И ПЛАНЕТАРНАЯ ПЕРЕДАЧА НА ЕГО ОСНОВЕ | 2007 |
|
RU2338105C1 |
| РЕДУКТОР ВОЗДУШНОГО ВИНТА ДЛЯ ТУРБОВИНТОВОГО АВИАЦИОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2272195C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА | 1995 |
|
RU2108509C1 |
| Безводильная планетарная передача | 1982 |
|
SU1036983A1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
73 72 а
20
75
Риг.2
