(54) КОНТАКТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Ударовиброустойчивый контактор | 1981 |
|
SU1020882A1 |
| Ударовиброустойчивый контактор | 1981 |
|
SU964778A1 |
| Удароустойчивый контактор прямоходового типа | 1982 |
|
SU1144158A1 |
| ПНЕВМАТИЧЕСКИЙ СОРТИРОВОЧНЫЙ СТОЛ | 2019 |
|
RU2717737C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2006 |
|
RU2331788C2 |
| Многополюсный герметичный контактор | 1977 |
|
SU748563A1 |
| Способ диагностики точности металлорежущего станка под нагрузкой | 2022 |
|
RU2794584C1 |
| ПОЛЯРИЗОВАННОЕ МАЛОГАБАРИТНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2018 |
|
RU2713475C1 |
| Электромагнитный коммутационный аппарат | 1972 |
|
SU519782A1 |
| Многополюсный герметичный контактор | 1989 |
|
SU1709421A2 |
1
; Изобретение относится к электрическим аппаратам в Частности к контакторам переменного тока поворотного тнпа, предназначенным для работы в условнях наклонов, тряски и вибрации.
Известны контакторы, содержащие электромагнит с поворотным якорем, укрепленным на валу, вращающемся в подшипниках, на котором установлены подвижнь1е контакты всех полюсов электромагнита, и жестко связанную с якорем деталь, несущую уравнове1шшающий груз.
В этом контакторе уравновешивающий груз обеспечивает уравновещквание подвижных частей только относительно вертикальной плоскости установки контактора.
С целью повышения надежности работы в условиях наклонов, вибрации и тряски в предложенном контакторе центр массы уравновешивающего груза и несущей его детали расположен на продолжении линии, соединяющей приведенный центр маесы остальных движущихся частей с осью вала, при-i чем уравновешивающий груз закреплен относи ельн несущей его детали с возможностью перемещения в направлении движения по направляющей до упора.
Между грузом и упором установлены пр)ткинь1, а зазор между ними может быть изменен. В этом случае при наличии вибрации плоскости установки контактора (вызванной внешним воздействием), собственная частота колебаний груза отличается от собственной частоты колебаний всей подвижной системы. Такое крепление уравновешивающего груза цозволяет при работе annapata в пределах заданных частот внешней механической вибрации места установки контактора сместить область частот peioнансных колебаний подвижной системы контактора за пределы диапазона гарантированных частот.
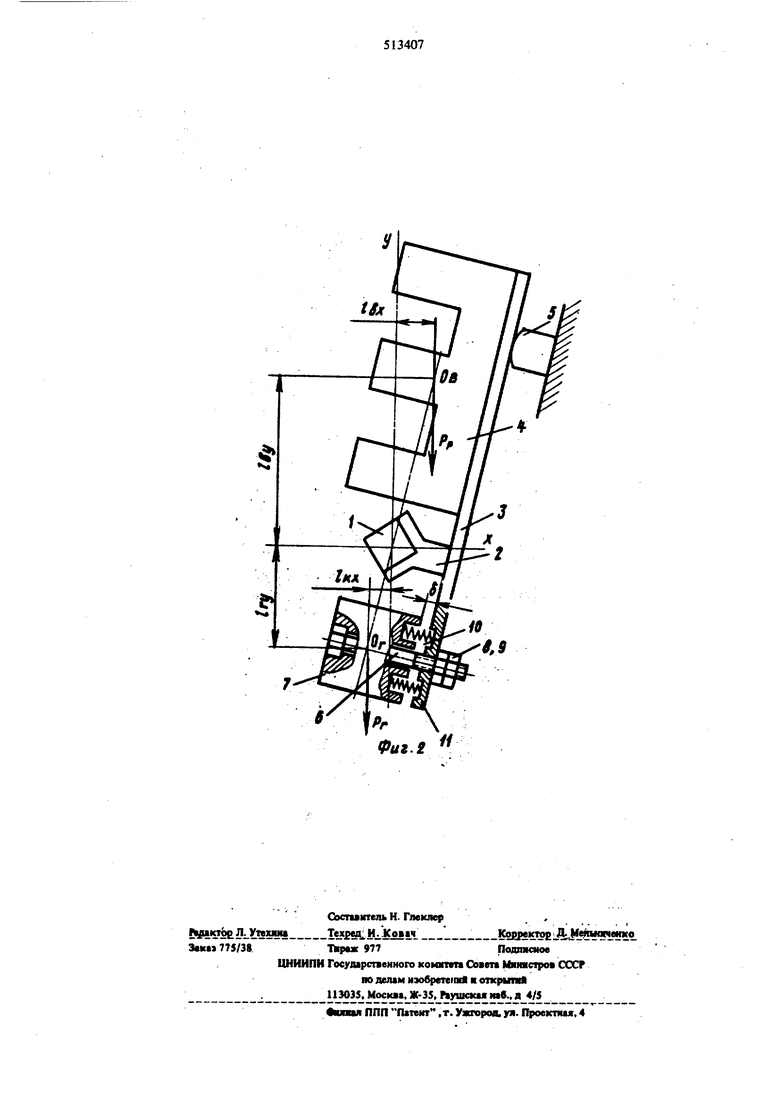
Ш фиг. 1 дана схема устройства; на фиг. 2 магнитная система, вид сбоку.
В предлагаемом устройстве груз расположен так, что его центр массы лежит на прямой, проходящей через центр массы подвижной системы О и центр вращения вала контактора О. В этом с.чучае при обеспечении уравновеитвания в всртикаль;ной плоскости автоматически обеспечивается уривновещивакие и в горилонтальной плоскости.
Р .р
если
В Ъ1 р .р р .в
то в ЗУ г Чу р.. - вес подвижной сиоземы
где
в
В
f.9
Фиг. 2
