Изобретение относится к электрическим аппаратам, в частности к электромагнитным контакторам поворотного типа, предназначенным для работы в условиях ударных нагрузок и вибраций.
Известны контакторы,- содержатцие электромагнит с поворотным якорем, укрепленным на вращающемся в подшипниках валу, на котором установлены подвижные контактные узлы полюсов контактора и детали, несущие уравновешивающий .груз. Причем груз расположен так, что его центр массы лежит на прямой, проходящей через центр массы подвижной системы контактора и центр вращения вала 1 .
Однако в таких конструкциях уда- роустойчивость обеспечивается только в тех случаях, когда ударные воздействия создают поступательные ускот рения (в горизонтальной, вертикальной или продольной плоскости). Если же ударные воздействия вызывают кроме того угловые ускорения, происходит ложное срабатывание контактора, что недопустимо.
Наиболее близким к изобретению по технической сущности является устройство с подвижной системой поворотного типа, воздействующейхна контакты, содержащее основание, в подшипниках которого закреплены на ваЛах два элемента, статически сбалансированные относительно их осей вращения и связанные между собой непроскальзывающей передачей с отношением радиусов зацепления передачи, равным отношению моментов инерции
10 этих элементов.
В качестве статически сбалансированных относительно их осей вращения элементов использованы два сбалансированных ротора, оси которых
15 располагаются на одной прямой с осью вращения подвижной части аппарата. Такие устройства обеспечивают ударостойкость как при поступательных, так и вращательных ускорениях, воз20никающих при ударном воздействии на аппарат 2.
Однако необходимость иметь два дополнительных сбалансированных ротора, связан-иых между собой зубчатым 25 зацеплением (непосредственно или через передаточную шестерню), усложняет конструкцию аппарата, делает непригодным такое решение для существующих контакторов с подвижной
30 системой поворотного типа.
Целью изобретения является упрощение конструкции устройства.
Поставленнач цель достигается тем, что в удароустойчивом контакторе с подвижной системой поворотного типа, воздействующей на контакты, содержащем основание, в подшипниках которого на валах закреплены два элемента, статически сбалансированные относительно их осей вращения и связанные между собой непроскальзывающей передачей, с отношением радиусов зацепления передачи, равным отношению моментов инерции этих элементов, одним из указанных элементов служит сама подвижная статически сбалансиррванная система контактора, закрепленная на одном из валов, а другой элемент выполнен в виде статически сба.лансированной системы грузов, закрепленных на другом валу, параллельном валу подвиж- ной системы контактора и вращающемся в подшипниках основания контактора, причем указанные элементы соединены между собой возвратной пружиной со свободно расположенной в ней дистанционной втулкой, ограничивающей возвратный ход указанных элементов.
Причем в качестве статически сбалансированной системы грузов использована статически уравновешенная поворотная подвижная система другого электрического аппарата или другая подвижная система, идентичная первой и установленная в тйм же корпусе.
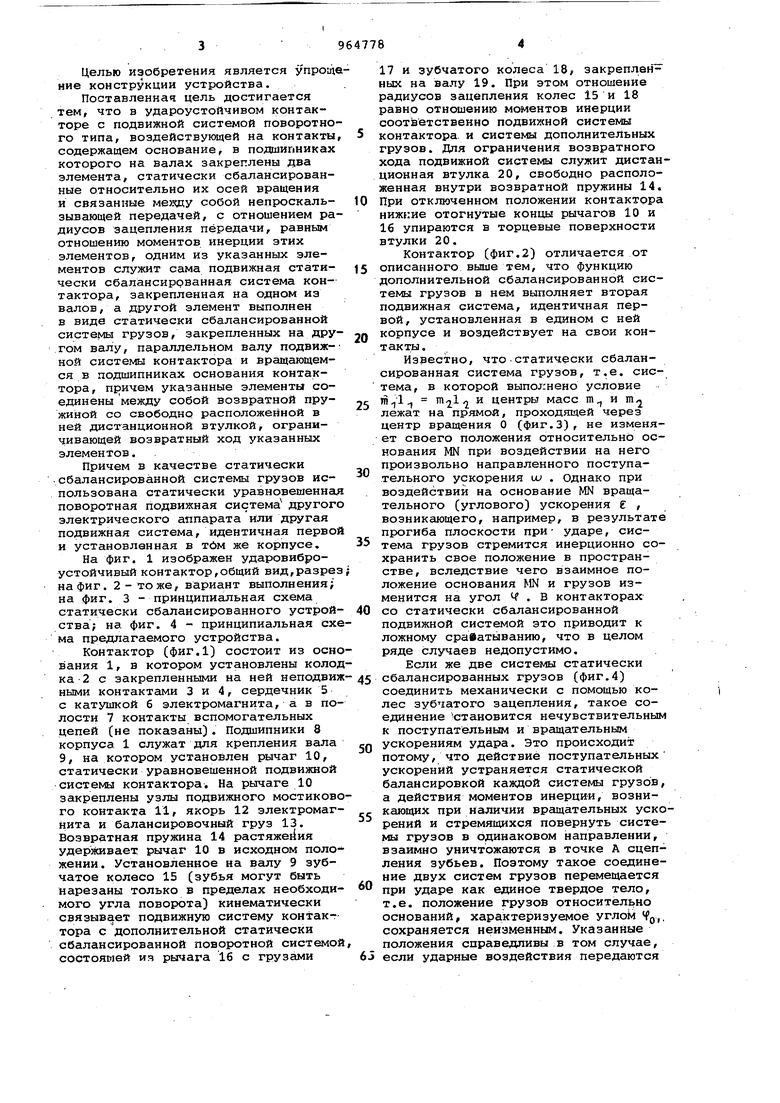
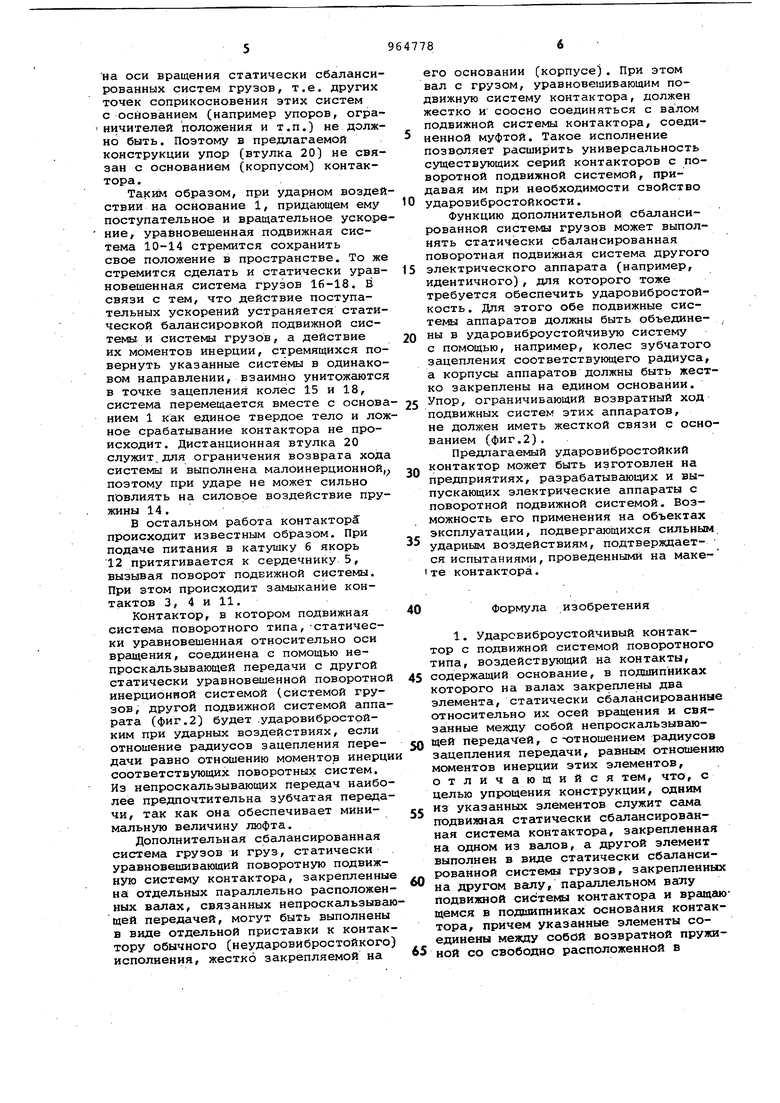
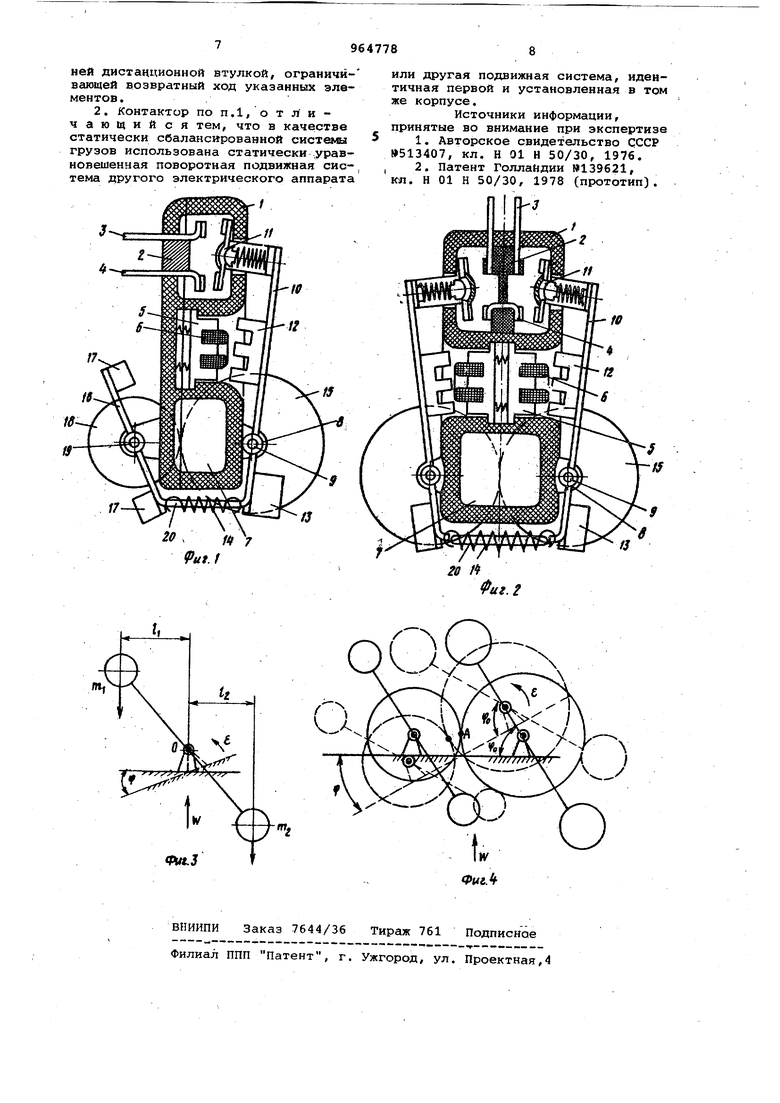
На фиг. 1 изображен ударовиброустойчивый контактор,общий вид,разрез на фиг. 2-то же, вариант выполнения; на фиг. 3 - принципиальная схема статически сбалансированного устройства; на фиг. 4 - принципиальная схема предлагаемого устройства.
Контактор (фиг.1) состоит из основания 1, в котором установлены колодка -2 с закрепленными на ней неподвижными контактами 3 и 4, сердечник 5 с катушкой 6 электромагнита, а в полости 7 контакты вспомогательных цепей (не показаны). Подшипники 8 корпуса 1 служат для крепления вала 9, на котором установлен рычаг 10, статически уравновешенной подвижной системы контактора. На рычаге 10 закреплены узлы подвижного мостикового контакта 11, якорь 12 электромагнита и балансировочный груз 13. Возвратная пружина 14 растяжег ия удерживает рычаг 10 в исходном положении. Установленное на валу 9 зубчатое колесо 15 (зубья могут быть нарезаны только в пределах необходимого угла поворота) кинематически связывает подвижную систему контактора с дополнительной статически сбалансированной поворотной системой состоямей из рычага 16 с грузами
17 и зубчатого колеса 18, закрепленных на валу 19. При этом отношение радиусов зацепления колес 15 и 18 равно отношению моментов инерции соответственно подвихсной системы контактора, и системы дополнительных грузов. Для ограничения возвратного хода подвижной системы служит дистанционная втулка 20, свободно расположенная внутри возвратной пружины 14. При отключенном положении контактора нижние отогнутые концы рычагов 10 и 16 упираются в торцевые поверхности втулки 20.
Контактор (фиг,2) отличается от описанного выше тем, что функцию дополнительной сбалансированной системы грузов в нем выполняет вторая подвижная система, идентичная первой, установленная в едином с ней корпусе и воздействует на свои контакты.
Известно, чтостатически сбалансированная система грузов, т.е. система, в которой выполнено условие и центры масс т и т лежат на прямой, проходящей через центр вращения О (фмг.З), не изменяет своего положения относительно основания MN при воздействии на него произвольно направленного поступательного ускорения ио . Однако при воздействии на основание MN вращательного (углового) ускорения g , возникающего, например, в результате прогиба плоскости при - ударе, система грузов стремится инерционно сохранить свое положение в пространстве, вследствие чего взаимное положение основания MN и грузов изменится на угол Ч . В контакторах со статически сбалансированной подвижной системой это приводит к ложному срабатыванию, что в целом ряде случаев недопустимо.
Если же две системы статически сбалансированных грузов (фиг.4) соединить механически с помощью колес зубчатого зацепления, такое соединение :становится нечувствительным к поступательным и вращательным ускорениям удара. Это происходит потому, что действие поступательных ускорений устраняется статической балансировкой каждой системы грузов, а действия моментов инерции, возникающих при наличии вращательных ускорений и стремящихся повернуть системы грузов в одинаковом направлении, взаимно уничтожаются в точке А сцепления зубьев. Поэтому такое соединение двух систем грузов перемещается при ударе как единое твердое тело, т.е. положение грузов относител1 но оснований, характеризуемое углом VQ,, сохраняется неизменным. Указанные положения справедливы в том случае, если ударные воздействия передаются
на оси вращения статически сбалансированных систем грузов, т.е. других точек соприкосновения этих систем с основанием (например упоров, ограI ничителей положения и т.п.) не должно быть. Поэтому в предлагаемой конструкции упор (втулка 20) не связан с основанием (корпусом) контактора.
Такит. образом, при ударном воздействии на основание 1, придающем ему поступательное и вращательное ускорение, уравновешенная подвижная система 10-14 стремится сохранить свое положение в пространстве. То же стремится сделать и статически уравновешенная система грузов 16-18. В связи с тем, что действие поступательных ускорений устраняется статической балансировкой подвижной системы и системы грузов, а действие их моментов инерции, стремящихся повернуть указанные системы в одинаковом направлении, взаимно унитожаются в точке зацепления колес 15 и 18, система перемещается вместе с основанием 1 как единое твердое тело и ложное срабатывание контактора не происходит. Дистанционная втулка 20 служит, для ограничения возврата хода системы и выполнена малбинерционной, поэтому при ударе не может сильно повлиять на силовое воздействие пружины 14.
В остальном работа контакторЗ происходит известным образом. При подаче питания в катушку 6 якорь 12 притягивается к сердечнику 5, вызывая поворот подвижной системы. При этом происходит замыкание контактов 3, 4 и 11.
Контактор, в котором подвижная система поворотного типа, статически уравновешенная относительно оси вращения, соединена с помощью непроскальзывающей передачи с другой статически уравновешенной поворотной инерционной системой (системой грузов, другой подвижной системой аппарата (фиг.2) будет .ударовибростойким при ударных воздействиях, если отношение радиусов зацепления передачи равно отношению моментов инерци соответствующих поворотных систем. Из непроскальзывающих передач наиболее предпочтительна зубчатая передачи, так как она обеспечивает минимальную величину люфта.
Дополнительная сбалансированная система грузов и груз, статически . уравновешивающий поворотную подвижную систему контактора, закрепленные на отдельных параллельно расположенных валах, связанных непроскальзывающей передачей, могут быть выполнены в виде отдельной приставки к контактору обычного (неударовибростойкого) исполнения, жестко закрепляемой на
его основании (корпусе). При этом вал с грузом, уравновешивающим подвижную систему контактора, должен жестко и соосно соединяться с валом подвижной системы контактора, соединенной муфтой. Такое исполнение позволяет расширить универсальность существующих серий контакторов с поворотной подвижной системой, придавая им при необходимости свойство
0 ударовибростойкости.
Функцию дополнительной сбалансированной системы грузов может выполнять статически сбалансированная поворотная подвижная система другого
5 электрического аппарата (например, идентичного), для которого тоже требуется обеспечить ударовибростойкость. Для этого обе подвижные системы аппаратов должны быть объединены в ударовиброустойчивую систему с помощью, например, колес зубчатого зацепления соответствующего радиуса, а корпусы аппаратов должны быть жестко закреплены на едином основании.
5 Упор, ограничивающий возвратный ход подвижных систем этих аппаратов, не должен иметь жесткой связи с основанием (фит.2).
Предлагаемый ударовибростойкий
Q контактор может быть изготовлен на предприятиях, разрабатываю1дих и выпускающих электрические аппараты с поворотной подвижной системой. Возможность его применения на объектах эксплуатации, подвергающихся сильным
5 ударным воздействиям, подтверждается испытаниями, проведенными на макете контактора.
Формула изобретения
40
1. Ударовиброустойчивый контактор с подвижной системой поворотного типа, воздействующий на контакты,
содержащий основание, в подшипниках которого на валах закреплены два элемента, статически сбалансированные относительно их осей вращения и связанные между собой непроскальзывгиощей передачей, с-отношением радиусов зацепления передачи, равным отношению моментов инерции этих элементов, отличающийся тем, что, с целью упрощения конструкции, одним
из указанных элементов служит сама подвижная статически сбалансированная система контактора, закрепленная на одном из валов, а другой элемент выполнен в виде статически сбалансированной системы грузов, закрепленных
на другом валу, параллельном валу
подвижной системы контактора и вращающемся в подшипниках основания контактора, причем указанные элементы соединены меясду собой возвратной пружиной со свободно расположенной в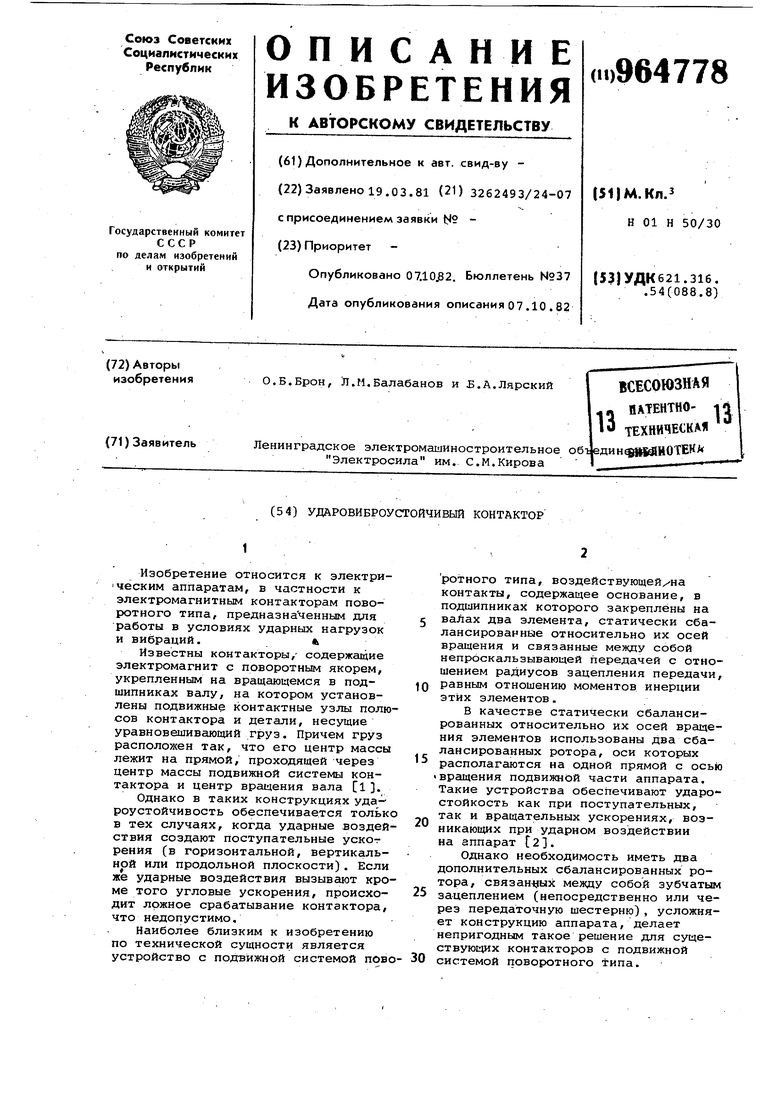
| название | год | авторы | номер документа |
|---|---|---|---|
| Ударовиброустойчивый контактор | 1981 |
|
SU1020882A1 |
| Ударовиброустойчивый контактор | 1989 |
|
SU1737549A1 |
| Удароустойчивый контактор прямоходового типа | 1982 |
|
SU1144158A1 |
| Устройство для защиты от токов короткого замыкания | 1990 |
|
SU1753501A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2279374C1 |
| Устройство для защиты от токов короткого замыкания | 1984 |
|
SU1238172A1 |
| Удароустойчивый контактор прямоходового типа | 1986 |
|
SU1336133A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
