нала преобразователя 6 вызывает появление напряжения соответствующей полярности на выходе частотного дискриминатора 5, настроенного на среднее значение частоты сигнала генератора 9, т. е. на то значение частоты сигнала, которое генерируется генератором 9 нри отсутствии управляющего напряжения на его входе. Выходное напряжение частотного дискриминатора 5 через усилитель мощности 4 поступает на исполнительный двигатель 3, который иачинает перемещать объект управления 2 в заданном направлении.
Выходной сигнал преобразователя 6 принимает вид
5in (
2.-(2::
е - sin (MO + Aw) t - время;
где (Во - среднее значение несущей частоты (частота настройки дискриминатора 5);
Xi - координата положения объекта управления 2 в момент начала движения;
е - период меры датчика перемещения 1; Jf/j-текущее значение координаты
объекта управления 2.
Таким образом, при движении объекта управления 2 частота выходного сигнала преобразователя вал-напряжение уменьшается на величину
г(0. 1
dt гJS
где V - мгновенная скорость объекта управления 2.
Так как датчик перемещения 1, преобразователь вал-напряжение, частотный дискриминатор 5, усилитель мощности 4, исполнительный двигатель 3 и объект управления 2 образуют замкнутый контур статического регулирования, установившаяся скорость перемещения объекта управления 2 поддерл ивается неизменной, при этом величина ее определяется величиной расстройки Асо несущей частоты сигнала генератора 9.
Одновременно фазовый детектор 13 вырабатывает информацию о перемещении объекта управления 2 в виде счетных импульсов, которые поступают в блок управления 14. Величина отработанного перемещения непрерывно сравнивается в блоке управления с заданным перемещением, и при подходе объекта управления к заданной координате величина унравляющего напряжения, поступающего из блока управления через блок суммирования 10 на вход генератора 9, плавно или ступенчато уменьшается, что вызывает соответствующее уменьшение расстройки Асо несущей частоты и, следовательио, уменьшение скорости перемещения объекта управления.
По окончании отработки перемещения управляющее напряжение на выходе блока управления становится равным нулю, и система
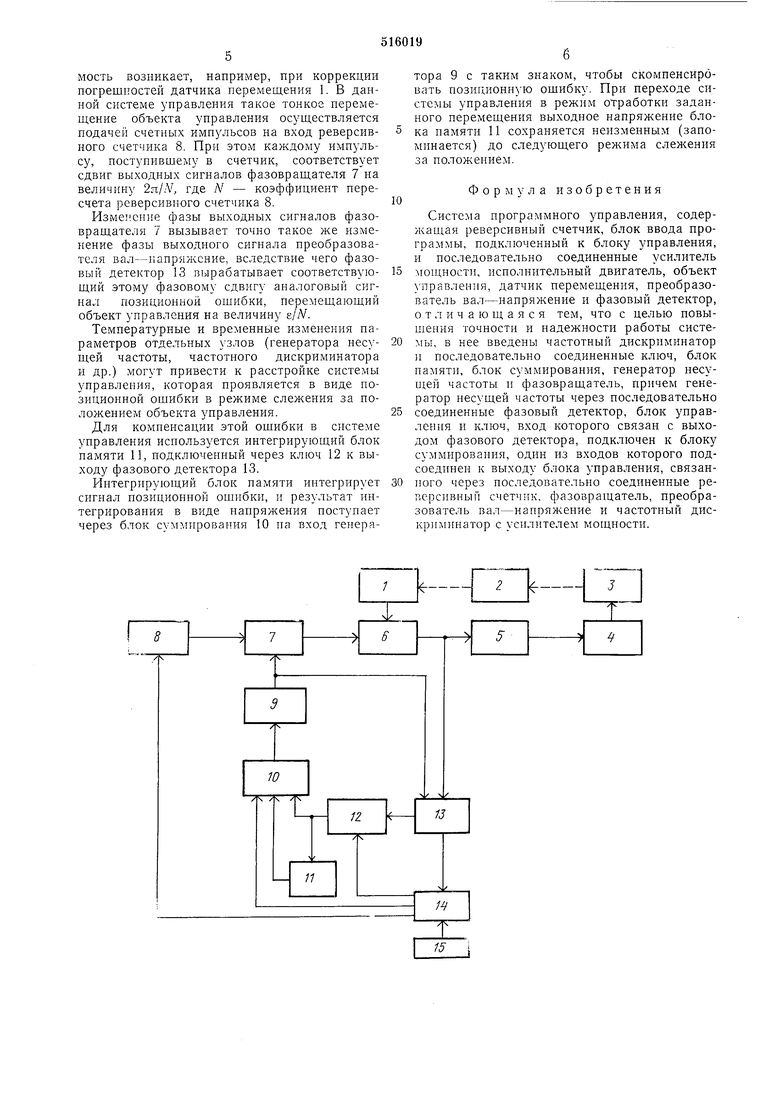
программного управления переходит в режим сложения за положением объекта управления, для чего из блока управления поступает командный сигнал, открывающий ключ 12 и замыкающий контур управления по позиции: фазовый детектор 13, ключ 12, блок суммирования 10, генератор 9 несущей частоты, фазовращатель 7, преобразователь 6 вал-напряжение. При этом на выходе фазового детектора 13, включенном в упомянутый контур, вырабатывается аналоговый сигнал, пропорциональный позиционной ошибке объекта управления. Этот сигнал, ноступая через ключ 12 и блок суммирования 10 на вход генератора 9,
вызывает изменение несущей частоты, что приводит к появлению напряжения на выходе частотного дискриминатора 5, которое через усилитель мощности 4 управляет исполнительным двигателем 3 так, что объект управления начинает перемещаться в направлении уменьшения позиционной ошибки.
Важным достоинством системы нрограммного управления является то, что в режиме сложения, кроме позиционной ошибки, вырабатывается еще и сигнал первой производной позиционной ошибки объекта управления, что существенно повышает качество позиционирования последнего. Формирование сигнала первой производной позиционной ошибки осуществляется частотным дискриминатором 5 из сигнала преобразователя вал-напряжение. Если вследствие каких-либо внешних механических возмущений подвижный элемент объекта управления начинает перемещаться,
частота выходного сигнала преобразователя 6 изменяется и оказывается равной
+ 1
что вызывает появление напряжения на выходе частотного дискриминатора 5. Это напряжение приводит в движение исполнительный двигатель 3 так, чтобы погасить скорость объекта управления.
Таким образом, в режиме слежения за положением объекта управления в системе программного управления действуют два контура управления: контур управления по позиционной ошибке - фазовый детектор 13, ключ 12,
блок суммирования 10, генератор 9 несущей частоты, фазовращатель 7, преобразователь вал-напряжение, частотный дискриминатор 5, усилитель мощности 4, исполнительный двигатель 3, объект управления и датчик перемещения; и контур управления по первой производной позиционной ошибки - преобразователь вал-напряжение, частотный дискриминатор 5, усилитель мощности 4, исполнительный двигатель 3, объект управления 2 и датчик перемещения 1.
Преимуществом предлагаемой системы программного управления является возможность осуществления перемещения объекта управления 2 на величину, меньшую, чем дискретность отсчета перемещения. Такая необходи
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки колебательного контура | 1983 |
|
SU1095359A1 |
| Ультразвуковой генератор | 1983 |
|
SU1102465A1 |
| Система частотно-фазовой синхронизации | 1983 |
|
SU1103356A1 |
| Устройство для измерения скорости | 1977 |
|
SU1034497A1 |
| Следящий фильтр-демодулятор | 1982 |
|
SU1095358A1 |
| Резонансный уровнемер | 1983 |
|
SU1083075A2 |
| ПАССИВНЫЙ КВАНТОВЫЙ СТАНДАРТ ЧАСТОТЫ | 1976 |
|
SU671652A1 |
| Система управления манипулятором | 1977 |
|
SU672613A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| Спектрометр ядерного резонанса | 1980 |
|
SU928209A1 |
