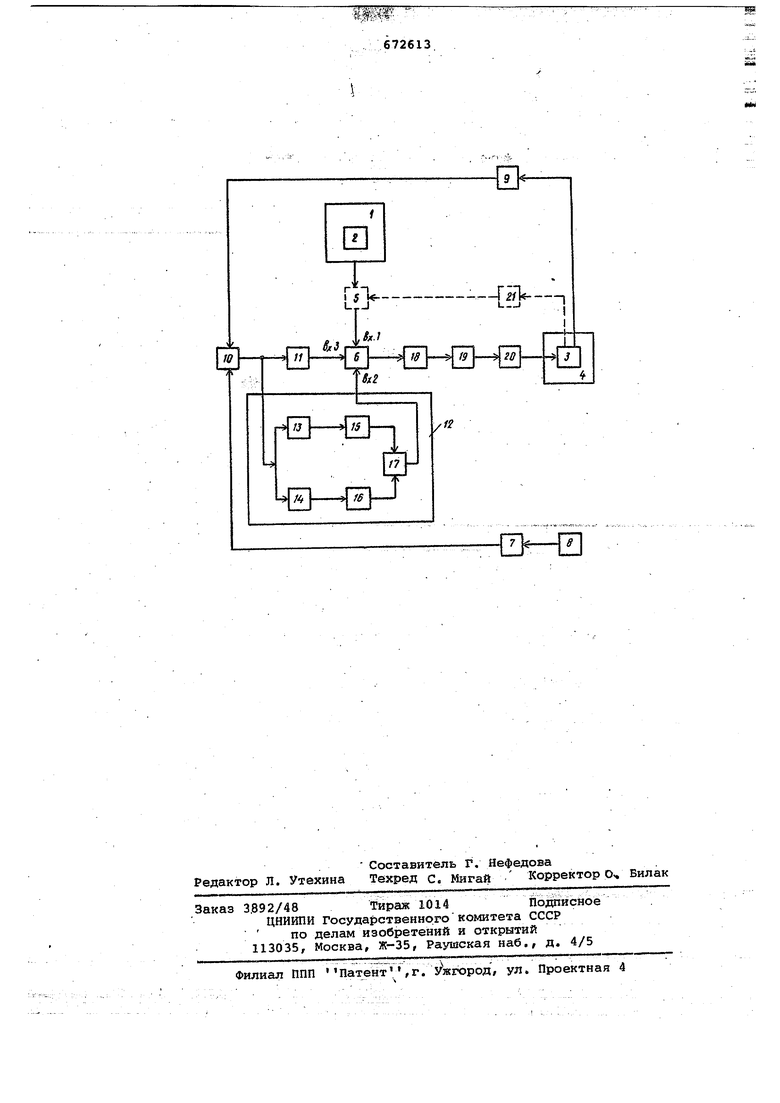
Изобретение может быть использовано при создании систем управления программным движением .манипуляторов, работающих синхронно с непрерывно дви жущимся объектом. Известна система управления манипулятором I, содержашая блок контроля положения, элемент сравнения, устройство синхронизации, блок памяти и исполнительный механизм. Однако она не учитывает изменение параметров движения объекта, в результате чего возникает ошибка в поступающем задающем сигнале, что снижает точност работы системы, Наиболее близ,ким техническим решением к изобретению является система (2), содержащая последовательно соединенные задатчик положения, элемент сравнения, сумматор, блок коррекции, усилитель мощности и привод, связанный через звено исполнительного орган с датчиком положения, выход которозг-о подключен ко второму входу элемента сравнения. Такая система не обеспечивает синхронности движения отдельных звеньев манипулятора относительно непрерывно движущегося объекта и связь упра влеНИИ во всех режимах работы с. задающим органом.. Целью изобретения является расширение функциональных возможностей системы. С этой целью предложенная, система содержит датчик вращения звена исполнительного органа, последовательно соединенные датчик вращения объекта манипулирования, преобразователь раз-ность частот-напряжение и фильтр низкой частоты и последовательно соединенные первыйуправляющий элемент и первый автогенератор и последовательно соединенные втррой управляющий .. элемент, второй автогенератор и фазовый детектор, второй вход которого подключен к выходу первого автогенератора, а выход - ко второму входу сумматора, третий вход которого соединен с выходом-фильтра низкой частоты, выход датчика вращения звена исполнительного органа подключен ко второму входу преобразователя разность частот-напряжение, выход которого соединен со входом первого и второго управляющих элементов. Структурная схема системы представлена на чертеже, где обозначены пульт управления 1, задатчик положения 2,
звено 3 исполнительного органа 4, элемент сравнения 5, сумматор 6, датчик 7 вращения объекта, объект манипулирования 8/ датчик 9 вргицения звена исполнительного органа, преобразователь 10 разность частот-напряжение, фильтр низкой частоты 11, дополнитель ный контур управления 12, содержащий Первый 13 и второй 14 управлякнцие эАе менты, первый 15 и второй 16 автогенераторы и фазовый детектор 17, блок коррекции 18, усилитель мощности 19, привод 20 и датчик положения 21.
Система управления манипулятором работает следующим образом.
Для обеспечения синхронного вращения объекта и звена 3 исполни TeJibного органа 4 сигналы датчиков BtJeiaieния 7 и 9 поступают на преобразователь 10, напряжение на выходе которого меняется с частотой, равной разности- частот вращения объекта 8 и звена 3, поступает на фильтр 11 и на контур управления 12, который обеспечивает астатический режим регулирования. Контур управления 12 полностыб устраняет зависимость фазы (частбты) вращения звена 3 от его расстройки . относительно фазы (частоты) вращения объекта 8. Сигнал рассогласования, поступак)щий с выхода преобразователя 10 через элементы 13 и 14 в противофазе, управляет частотой автогенераторов 15 и 16, колебания которых сравниваются в детекторе 17. Вьрсодйое напряжение детектора 17 опрёдёйяётся разностью фаз напряжений, действующйх на его входах. Этим завершается йн гегрйрование -сигнала рассогласования преобразователя 10. Напряжение с выхода детектора 17 через сумматор 6, блок коррекции 18 и усилитель мощности 19 поступает на вход привода .20 звена 3. Привод 20 отрабатывает входной сигнал рассогласования. При этом звено 3 поворачивается таким образом, чтобы ликвидировать отклонение пофазе (частоте) двйженйя/(вращёнйя) b6i екта 8.Для расширения рабочей зоны обслу жйвания манипулятора,установки заданного угла рассогласования между объектом 8 и звеном 3 манипулятора ситема содержит задатчик положения 2 на пульте управления 1, а между приводом 20 и cyis taTopoM 6 имеется контур обраной связи по углу через датчик положения 21.
В заШнутоЙ системе управления выходное напряжение детектора 17 обеспечивает компенсацию взаимной расстройки движения звена 3 и объекта 8, а вьрсодное напряжение преобразователя 10 компенсацию начальной расстройки генераторов 15 и 16, поэтому в резуль расстройки звена 3 относительно Опорного сигнала объекта 8 изйенйется напряжение только на выходе детектора 17, что эквивалентно введению в систему точного астатизма по фазе (частоте). Полоса синхронизации (максимально допустимой расстройки) звена 3 определяемся крутизной характеристики усилителя мощности 19 и максимальным выходным напряжением детектора 17, При необходимости Ьператор поворачивает рукоятку задатчика положения 2 звена 3 на пульте управления 1. Задатчик положения 2 выдает через первый вход сумматора 6 управляющий сигнал на вход привода 20 звена 3. Привод 20 отрабатывает входной сигнал. При этом звено 3 рассогласовывается относительно вращающегося объета 8 на заданный угол. Рабочая зона звена 3 смещается относительно вращающегося объекта 8, чем увеличивается (изменяется) зона обслуживания манипулятора.
Применение изобретения позволит расширить функциональные возможности системы управления манипулятором за счет обеспечения синхронного с заданным рассогласованием перемещения звена исполнительного органа относительно объекта манипулирования.
Формула изобретения
Система управления манипулятором, содержащая последовательно соединенные эадатчик положения, элемент сравнения, сумматор, блок, коррекции, усилитель-, мощности и привод, связанный через звеноисполнительного органа с датчиком положения, выход которого подключен ко второму входу элемента сравнения, о т л и ч а ю щ а я с .я тем, что, с целью расширения функциональных возможностей, она содержит датчик вращения звена исполнительногр органа, последовательно соединенные датчик вращения объекта манипулй эйвания, преобразователь разность частот-напряжение и фильтр низкой чатоты, пойлёдбвательно соединенный первый упра вляющий элемент и первый автогенератор и последовательно соединенные второй управляющий Элемент, второй автогенератор и фазовый детектор, второй Вход -которого подключен к выходу первого автогенератора, а выход - ко второму входу сумматора, третий вход которого соединен с выходом фильтра низкой частоты., выход датчика вращения звена исполнительного органа подключён ко второму входу преобразователя разность частот-напржение, выход которого соединен со входом первого и Второго управляющих элементов.
Источники информации, принятые во внйМайие при экспертизе
1.Патент Японии 49-48206, М.кл. В 25 J 9/00, 1974.
2.Авторское свидетельство СССР
499108, кл. В 25 Т 9/00, 25.02.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Система управления | 1983 |
|
SU1120283A1 |
| ЙДТЕЙТИС- <л*^ теХНЕЧЕСКдй ^^ЕИБЛЙОТЕКАВ. М, Сафонов | 1970 |
|
SU283316A1 |
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Цифровая система для программного управления | 1984 |
|
SU1228075A1 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Релейный регулятор | 1976 |
|
SU697971A1 |