цию обмоток электродвигателя производят дважды. Сначала осуществляют коммутацию обмоток, соответствующую отработке целого угла поворота, т. е. поворачивают результирующий вектор намагничивающей силы на }гол фа до положения вектора F, создавая в обмотках намагничивающие силы FI, F. Ротор двигателя, стремясь синхронизироваться с вектором F, начинает поворачиваться. При этом двигатель развивает увеличенный момент, соответствующий отработке целого угла поворота. После поворота ротора на часть требуемого угла производят коммутацию обjMOTOK двигателя, соответствующую отработке уже требуемого угла, создавая в обмотках намагничивающие силы FH, /31, результирующий вектор которых FI повернут относительно исходного 0 на угол фь Ротор двигателя, стремясь синхронизироваться с новым вектором намагничивающей силы FI, поворачивается на угол, несколько меньший требуемого.
Выбором соотношения токов в обмотках, т. е. изменением величины векторов намагничивающих сил обмоток и FZ (например, до значений и fai), можно задать любой угол новорота ротора в цределах от О до 1/2 фо. Если при исходных векторах намагничивающих сил FI, произвести коммутацию обмоток, соответствующую векторам намагничивающих .сил FI, FZ, то изменением соотношения последних (например, до величин FI, ), можно угол поворота ротора регулировать в пределах от 1/2 фо до фо. Форсировка момента двигателя при отработке этих углов производится аналогично описанному.
Изменением токов статора можно получить практически любой угол поворота ротора в диапазоне от О до 180 эл. град, с увеличенным моментом отработки.
Таким образом, описываемый способ благодаря отработке дробных углов в два этапа, позволяет увеличить момент двигателя и, следовательно, повысить жесткость статической механической характеристики и точность отработки по сравнению с известными способами,
Предлагаемый способ применим для управления шаговым режимом не только асинхронных двигателей, но и синхронно-реактивных, шаговых и других двигателей переменного тока с произвольным числом обмоток.
Устройство, реализующее описываемый способ, работает следующим образом.
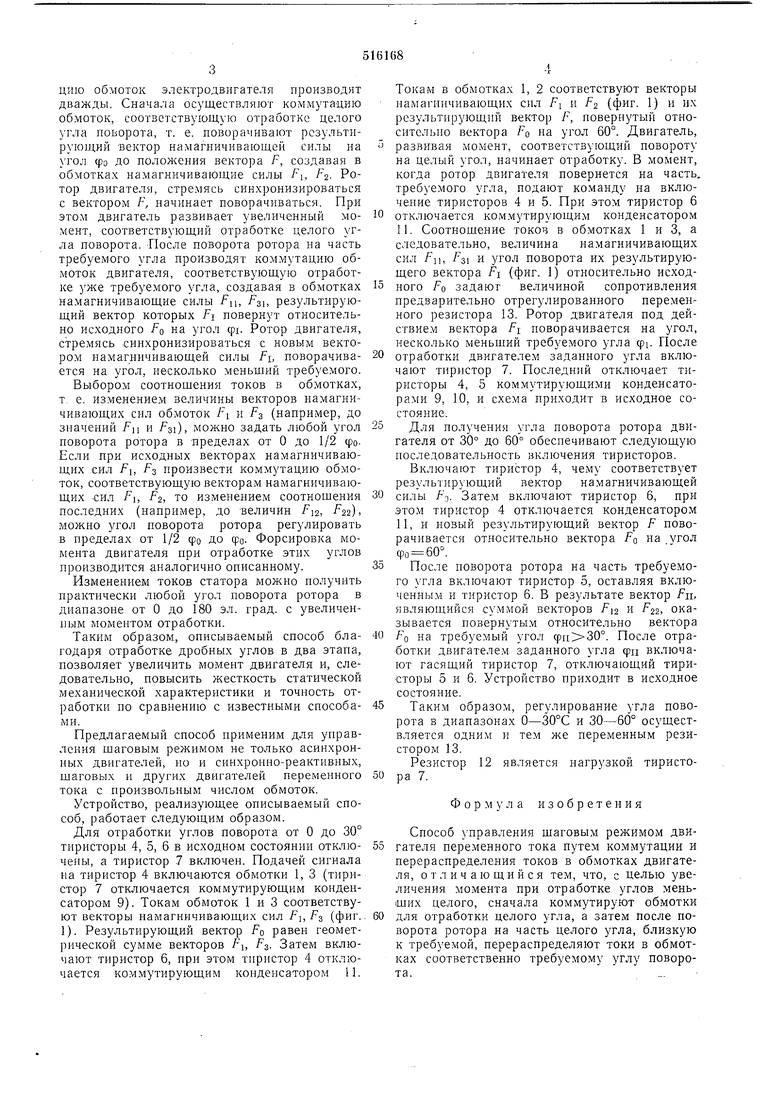
Для отработки углов поворота от О до 30° тиристоры 4, 5, 6 в исходном состоянии отключены, а тиристор 7 включен. Подачей сигнала на тирнстор 4 включаются обмотки 1, 3 (тиристор 7 отключается коммутирующим конденсатором 9). Токам обмоток 1 и 3 соответствуют векторы намагничивающих сил f, з (фиг.. 1). Результирующий вектор FQ равен геометрической сумме векторов F, F. Затем включают тиристор 6, при этом тиристор 4 отключается коммутирующим конденсатором 11.
Токам в обмотках 1, 2 соответствуют векторы намагничивающих сил F и F (фиг. 1) и их результирующий вектор /, новернутый относительно вектора FQ на угол 60°. Двигатель, развивая момент, соответствующий повороту на целый угол, начинает отработку. В момент, когда ротор двигателя повернется на часть, требуемого угла, подают команду на включение тиристоров 4 и 5. При этом тиристор 6 отключается коммутирующим конденсатором II. Соотношение токов в обмотках 1 и 3, а следовательно, величина намагничивающих сил f, 31 и угол поворота их результирующего вектора FI (фиг. 1) относительно исходного FO задают величиной сопротивления предварительно отрегулированного переменного резистора 13. Ротор двигателя под действием вектора FI поворачивается на угол, несколько меньший требуемого угла ф1. После
отработки двигателем заданного угла включают тиристор 7. Последний отключает тиристоры 4, 5 коммутирующими конденсаторами 9, 10, и схема приходит в исходное состояние.
Для получения угла поворота ротора двигателя от 30° до 60° обеспечивают следующую последовательность включения тнристоров.
Включают тиристор 4, чему соответствует результирующий вектор намагничивающей
силы /-п. Затем включают тиристор 6, при этом тиристор 4 отключается конденсатором 11, и новый результирующий вектор F поворачивается относительно вектора FQ на угол фо 60°.
После поворота ротора на часть требуемого угла включают тиристор 5, оставляя включенным и тиристор 6. В результате вектор Fn, являющийся суммой векторов и /22, оказывается повернутым относительно вектора
на требуемый угол . После отработки двигателе.м заданного угла фц включают гасящий тиристор 7, отключающий тиристоры 5 и 6. Устройство приходит в исходное состояние.
Таким образом, регулирование угла поворота в диапазонах О-30°С и 30-60° осуществляется одним и тем же переменным резистором 13.
Резистор 12 является нагрузкой тиристора 7.
Формула изобретения
Способ управления шаговым режимом двигателя переменного тока путем коммутации и перераспределения токов в обмотках двигателя, отличающийся тем, что, с целью увеличения момента при отработке углов меньших целого, сначала коммутируют обмотки для отработки целого угла, а затем после поворота ротора на часть целого утла, близкую к требуемой, перераспределяют токи в обмотках соответственно требуемому углу поворота.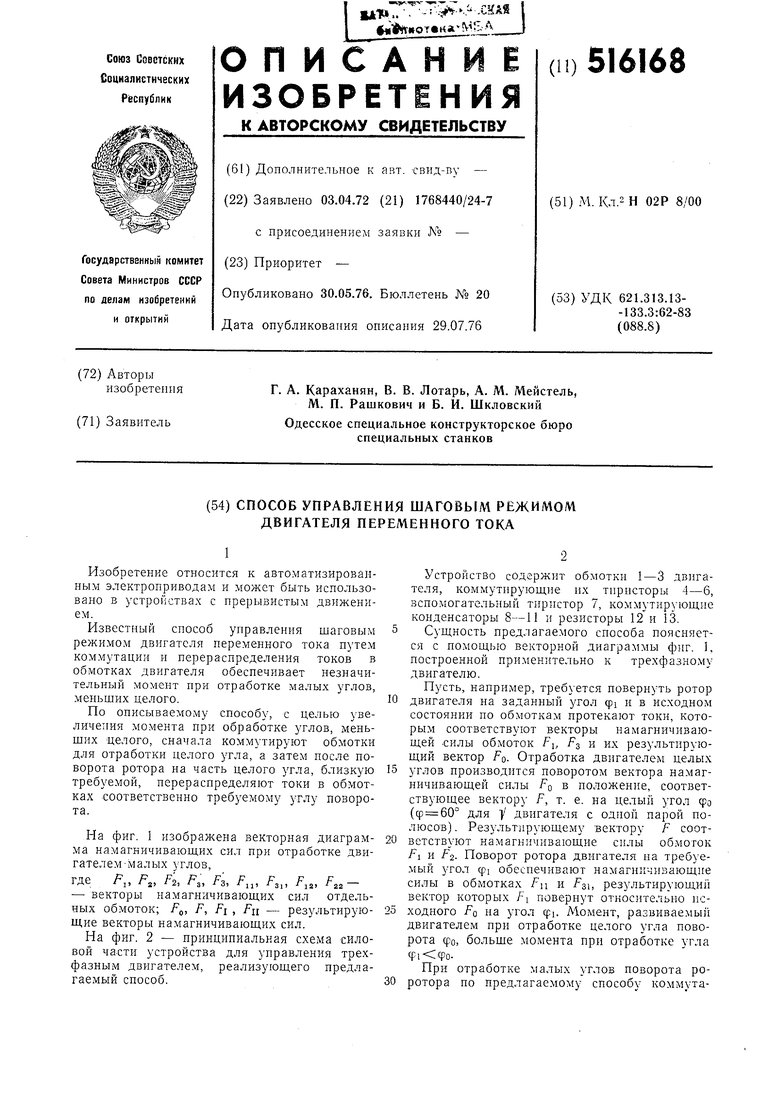
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления трехфазным асинхронным двигателем в режиме шагового движения | 1988 |
|
SU1661962A1 |
| Электропривод | 1979 |
|
SU896734A1 |
| Способ управления многофазным шаговым двигателем | 1986 |
|
SU1361703A1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
| БЕСКОЛЛЕКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО | 1973 |
|
SU392590A1 |
| Способ восьмитактного управления четырехфазным шаговым двигателем | 1981 |
|
SU1001421A1 |
| Привод периодических подач | 1971 |
|
SU474789A1 |
| СПОСОБ ПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ПОТРЕБИТЕЛЕЙпостоянного ТОКА от | 1964 |
|
SU165225A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОЗБУЖДЕНИЯ МНОГОДВИГАТЕЛЬНОГО ГИСТЕРЕЗИСНОГО ЭЛЕКТРОПРИВОДА | 1989 |
|
SU1785405A1 |
| УСТРОЙСТВО для ОГРАНИЧЕНИЯ УДАРНЫХ МОМЕНТОВ ПРИ ПУСКЕ ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 1968 |
|
SU221117A1 |
Фиг. 1
п
(Риг. 2
