Способы питания электрических потребителей постоянного тока от регулируемого одноякорного преобразователя (автодина) известны. Широко применяются с этой целью двигатель-генераторные агрегаты, которые позволяют питать электрические потребители плавно изменяющимся в широких пределах напряжением и могут легко переходить в инверторный режим, обеспечивая при необходимости рекуперацию электроэнергии от потребителя постоянного тока в сеть переменного тока. Такие преобразовательные агрегаты используются, например, в системах электрического привода станков, грузоподъемных механизмов, землеройных машин.
В большинстве подобных установок целесообразно применять вместо двухмашинного двигатель-генераторного агрегата регулируемый одноякорный преобразователь (автодин). В автодине преобразование переменного тока в постоянный осуществляется электрическим путем непосредственно в якорной обмотке машины без промежуточного преобразования электрической энергии в механическую, как в двигатель-генераторном агрегате. Поэтому он имеет меньшие вес, габариты и потери мощности, чем двигатель-генераторный агрегат тех же мощности, напряжения и скорости вращения. Кроме того, автодин обладает свойством электромашинного усилителя мощности, т. е. позволяет получать весьма широкий диапазон регулирования выходного напряжения, при значительно меньшей мощности управления, чем в двигатель-генераторном агрегате.
Предлагаемый способ питания электрических потребителей постоянного тока повышает технико-экономическую эффективность электрических установок, в которых используется регулируемый одноякорный преобразователь (автодин). Это достигается отдачей автодином в сеть переменного тока реактивной мощности при любых режимах рабогы питаемого от него электрического потребителя. В автодине в результате совместного действия статорных обмоток скользящего 13озбуждения и намагничивающей силы постоянного тока якоря между переменным током преобразователя и напряжением сети образуется некоторый угол сдвига фаз, который в зависимости от положения в пространстве магнитного потока автодина, полярности машины и направления постоянного тока, протекающего по ее якорю, может иметь тот или
иной знак. При пуске автодина после вхождения его ротора в синхронизм, до подачи управляющего сигнала, магнитный поток автодина-переводят в такое положение, при котором вектор переменного тока машины оперезаданной полярности и заданном направлении постоянного тока отдает в сеть переменного тока реактивную мощность. В статорную обмотку автодина, расположенную по осн одного из расщепленных полуполюсов, подают от постороннего источника однополярный импульс тока определенного напряжения, который обеспечивает перевод магнитного потока в указанное положение. Для перевода магнитного потока на одном из расщепленных полуполюсов автодина может быть предусмотрена специальная обмотка, подключаемая при пуске к независимому источнику постоянного тока, в которой создается импульс намагничивающей силы определенного пространственного направления. Может быть также использована одна из ветвей обмотки скользящего возбуждения или какая-либо другая статорная обмотка машины, которую временно отключают от щеток автоднна, подключают к независимому источнику и затем после поворота магнитного потока в требуемое положение вновь подключают к щеткам машины.
При питании от автодина электрических потребителей, работающих в условиях изменения полярности питающего напряжения или изменения направления тока нагрузки, например реверсивных электродвигателей, необходимо при каждом изменении полярности напряжения автодина и направления тока нагрузки поворачивать магнитный поток автодина из одного положения в другое (из одного квадранта в другой).
Это производится изменением пространственного направления указанного импульса намагничивающей силы, создаваемого по оси одного или одновременно двух расщепленных полуполюсов, при каждом изменении полярности или направления тока нагрузки.
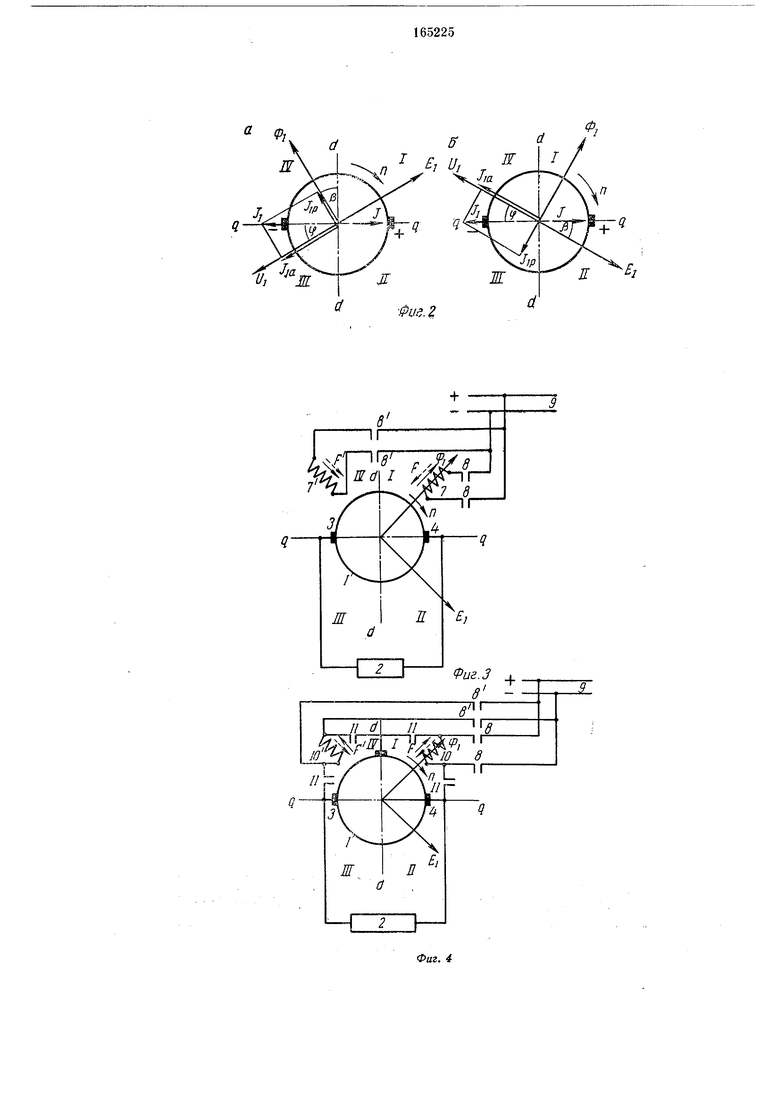
На фиг. 1 изображены принципиальные схемы автодина при некоторой полярности его выходного напряжения и направлении тока нагрузки для двух возможных положений вектора магнитного потока автодина; на фиг. 2- упрощенные векторные диаграммы переменного тока, напряжения и э. д. с. автодина при указанных положениях вектора его магнитного потока; на фиг. 3 и 4 - принципиальные схемы включения статорных обмоток, обеспечивающие работу автодина с отдачей в сеть реактивной мощности при любой полярности и любом направлении тока нагрузки.
В автодине регулирование выходного напряжения и, подаваемого с якоря 1 машины на нагрузку 2, осуществляется поворотом вектора магнитного потока Oi, при этом между поперечными щетками 3 и 4 машины действует напряжение JJ, пропорциональное проекции Eg вектора э. д. с. Е на поперечную ось машины. При изменении угла р между вектором магнитного потока Фх и продольной осью машины изменяются проекция Е вектора э. д. с. EI, а следовательно, и величина выходного напряжения U, подаваемого на нагрузку. Автоматическое регулирование в автодине осуществляется подачей на управляющую обмотку 5 машины непосредственно или через промежуточный усилитель 6 некоторого задающего сигнала и сигнала обратной связи иО.С но управляемому параметру. В качестве такого сигнала могут служить само напряжение U автодина, его ток нагрузки /, скорость вращения питаемого от него электродвигателя или любой другой параметр, регулирование которого должна осуществить электрическая установка с автодином. При наличии рассогласования Д(У между задающим сигналом и Зад и сигналом обратной связи t/o.c в управляющей обмотке 5 усилителя 6 возникает ток AIу, который поворачивает вектор магнитного потока Oi и изменяет выходное напряжение U автодина до ликвидации рассогласования между сигналами t/iad
и о.с . Таким образом автоматически негулируются напряжение автодииа, его ток нагрузки / и другие параметры.
При пуске автодина после окончания процесса синхронизации вектора магнитного потока Ф1 он может занять произвольное положение в пространстве, т. е. находиться в любом квадранте, образованном продольной d-d и поперечной q-q осями машины. Этим определяется полярность рабочих щеток автодина и угол сдвига фаз ф между переменным током и напряжением. Так, например, в положениях вектора магнитного потока 0i на фиг. 1, а и б полярность машины остается одной и той же, но угол сдвига фаз между
векторами переменного тока /i и напряжения Ui имеет разный знак.
Упрощенные векторные диаграммы (фиг. 2, а и 6) построены для положений вектора магнитного потока Фх, показанных на фиг. 1,
о и б (в квадрантах / и IV). На них изображены векторы э. д. с. EI магнитного потока Ф1, напряжения сети Ui, переменного тока/i и его активной Ла и реактивной /ip составляющих при заданной полярности машины и
заданном направлении ее вращения и направлении постоянного по величине тока.
Когда вектор магнитного потока Ф1 находится в квадранте IV (фиг. I, а я 2, а), ток / остается от напряжения Ui, т. е. автодин потребляет ток /i в квадранте / (фиг. 1, б и 2,6), опережает напряжение t/i, иначе говоря, автодин отдает в сеть реактивную мощность. Чтобы автодин работал с отдачей в сеть
реактивной мощности, необходимо после окончания процесса синхронизации перевести вектор его магнитного потока Ф1 из любого положения, которое он может занимать, в положение, в котором вектор /i опережает вектор Ui. Для этой цели на его полуполюсах могут быть предусмотрены специальные обмотки 7 и 7 (фиг. 3), подключаемые контактами 8 или 8 к независимому источнику постоянного тока 9. Так, например, при указанлении тока нагрузки вектор магнитного потока Oi необходимо перевести в квадрант /, для чего в обмотку 7 надо подать импульс тока, создающий намагничивающую силу F, направленную, как показано на фиг. 3 сплошной стрелкой.
После поворота вектора магнитного потока Ф в требуемое положение импульс намагничивающей силы F снимается и вводится в работу- система управления, которая обеспечивает за счет соответствующих обратных связей перемещение вектора магнитного потока Ф1 в пределах данного квадранта при изменении выходного напряжения автодина от максимального значения до нуля. Чем меньше выходное напряжение автодина, тем большую реактивную мощность отдает машина при заданном токе нагрузки.
При изменении полярности машины (что необходимо, например, для изменения вращения питаемого от нее электродвигателя) вектор магнитного потока Ф надо перевести в квадрант ///, для чего в обмотку 7 необходимо подать импульс тока, создающий намагничивающую силу F в направлении, показанном пунктирной стрелкой. При сохранении полярности, показанной на фиг. 1, и изменении направления тока / (что происходит, например, при переводе питаемого от автодина электродвигателя в режим рекуперативного торможения) следует перевести вектор магнитного потока Ф1 в квадрант IV путем создания в обмотке 7 намагничивающей силы F в направлении, показанном сплошной стрелкой. При изменении направления тока и полярности машины по сравнению с фиг. 1 нужно перевести вектор магнитного потока Ф1 в квадрант //, создав в обмотке 7 намагничивающую силу F в направлении, показанном пунктирной стрелкой.
Осуществить перевод вектора магнитного потока Ф1 в требуемый квадрант после запуска и при каждом изменении полярности машины и направления тока нагрузки можно с помощью обмотки возбуждения (или какойлибо другой имеющейся уже в машине статорной обмотки), одна из ветвей которой 10 или 10, расположенная на соответствующем полуполюсе, отключается контактами // (фиг. 4) на короткое время от щеток 5 и 4 автодина и подключается контактами 5 или 8 к источнику постоянного тока 9. Затем после поворота вектора магнитного потока Фх в требуемый квадрант она снова с помощью контактов 8-8 и // подключается к щеткам 3 W. 4 автодина.
Во многих случаях, например при цуске электродвигателей, питаемых от автодина, целесообразно перед подключением к автодину электрического потребителя установить вектор магнитного потока по поперечной оси машины, при этом напряжение на поперечных щетках 3 vi 4 автодина принимает нулевое значение и можно подключать потребитель к автодину без толчка тока нагрузки. Для этого указанные импульсы намагничивающей силы F и F целесообразно подавать одновременно в обмотки 7 и 7 (фиг. 3) или 0 и 10 (фиг. 4), расположенные по осям двух расщепленных полуполюсов так, чтобы результирующая намагничивающая сила действовала по поперечной оси машины и перемещала вектор магнитного потока в положение, при котором ток /1 опережает на 90° напряжение Ui.
При питании от автодина отдельных потребителей, работающих в условиях частых изменений полярности питающего напряжения или направления тока нагрузки, при одном из которых нагрузка автодина значительно больще, чем при другом, например электродвигателей приводов некоторых механизмов возвратно-поступательного движения (электроприводовпродольно-строгальных
станков, долбежных станков и пр.), во многих случаях нецелесообразно поворачивать магнитный поток автодина из одного положения в другое при каждом изменении полярности его выходного напряжения и направления тока нагрузки. В этих случаях импульс
тока подают в соответствующие статорные обмотки только при пуске автодина, перемещая вектор магнитного потока Фх в такой квадрант, чтобы переменный ток /i опережал напряжение сети Ui при полярности автодина
и направлении тока нагрузки, соответствующих наиболее тяжелому режиму работы электрического потребителя, например рабочему ходу в электроприводах указанных механизмов.
SS
Предмет изобретения
1.Способ питания электрических потребителей постоянного тока от регулируемого одноякорного преобразователя (автодина), отличающийся тем, что, с целью максимальной отдачи автодином в сеть реактивной мощности при пуске автодина после вхождения его ротора в синхронизм, до подачи управляющего сигнала, в статорную обмотку, расположенную по оси одного из расщепленных полуполюсов, подают от постороннего источника однополярный импульс тока так, чтобы магнитный поток машины повернулся в положение, при котором автодин получает заданную полярность, а вектор переменного тока опережает вектор напряжения сети.
2.Способ по п. 1, отличающийся тем, что указанный импульс тока создают путем
временного подключения к независимому источнику постоянного тока дополнительной обмотки, расположенной для этой цели на одном из расщепленных полуполюсов автодина.
3.Способ по п. I, отличающийся тем, что указанный импульс тока создают путем
временного подключения одной из ветвей обмотки возбуждения или какой-либо другой статорной обмотки мащины к независимому источнику постоянного тока с последующим переключением ее вновь к щеткам автодина.
4.Способ по п. 1, отличающийся тем, что, с целью поворота магнитного потока при пуске в положение, при котором напряжение иа поперечных щетках принимает нулевое значение, указанный импульс тока создают по осям двух расщепленных полуполюсов так, чтобы результирующая намагничивающая сила этих полуполюсов действовала по поперечной оси машины и имела направление, при котором вектор переменного тока автодина опережает вектор напряжения сети на угол 90°.
5.Способ по по. 1 и 4, отличающийся тем, что при питании потребителей, работа которых происходит в условиях изменения полярности питающего напряжения или направления тока нагрузки при каждом изменении полярности автодина или направления тока нагрузки изменяют и направление указанного импульса тока.
6.Способ по пп. I и 4, отличающийся тем, что при питании электрических потребителей, работа которых происходит в условиях частых изменений полярности питающего напряжения или направления тока нагрузки, при одном из которых нагрузка автодина значительно больще, чем при другом, указанный
импульс тока подают при пуске автодина в таком направлении, чтобы вектор переменного тока опережал вектор напряжения сети при полярности автодина и направлении тока нагрузки, соответствующих наиболее тяжелому режиму работы электрического потребителя.
7.Применение способа по пп. 1-5 для реверсивных электроприводов с относительно длительным временем работы при каждом направлении вращения, например электроприводов токарных, карусельных и буровых станков.
8.Применение способа по пп. 1-5 для реверсивных электроприводов с относительно
5 длительным временем работы в силовом и тормозном режимах, например электроприводов грузоподъемных механизмов (кранов, лифтов), шахтных подъемных машин и экскаваторов.
0 9. Применение способов по пп. 1-4 и 6 для реверсивных электроприводов механизмов и станков с возвратно-поступательным движением рабочего органа, например строгальных и долбежных станков, а также прокатных
5 станов.


| название | год | авторы | номер документа |
|---|---|---|---|
| Сварочный одноякорный преобразователь, переменного тока в постоянный | 1955 |
|
SU108886A1 |
| Способ управления автодином | 1959 |
|
SU132709A1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2002 |
|
RU2243572C2 |
| Электрическая установка для генерирования электрической энергии | 1940 |
|
SU62075A1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2178228C2 |
| Устройство для регулирования скорости асинхронного двигателя | 1944 |
|
SU68207A1 |
| Установка для энергоснабжения пассажирских вагонов и способ управления ею | 1958 |
|
SU117423A1 |
| Устройство для автоматического регулирования напряжения тяговых подстанций | 1957 |
|
SU132270A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU245889A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ У ПОТРЕБИТЕЛЯ | 1973 |
|
SU382215A1 |

4/я 6
/ .. X аЗ
fu
Фиг 1
В -a&Jy 5
I,
Л i
Фи.. Z
