Изобретение относится к области геофизики, астрономии и астрофизики, к способам измерения гравитационных полей, обнаружению скрытых масс или объектов.
Известен способ определения скорости распространения гравитационного взаимодействия тел, согласно которому определяют параметр, характеризующий гравитационное взаимодействие, по величине которого судят о скорости распространения гравитационного взаимодействия (патент Российской Федерации N 2124743, МПК6 G 01 V 7/00, 1999).
Указанный способ имеет недостаток, заключающийся в сложности создания движущейся массы, у которой центр масс должен совпадать с геометрическим центром тела.
Известен способ измерения изменения состояния вращающегося волчка, установленного на технических весах, на стойку которых передают колебательное механическое воздействие, при этом устройство для измерения изменения состояния вращающегося волчка содержит волчок, систему регистрации, систему запуска и вибрации (Козырев Н.А. Избранные труды, Л. Издат, Ленинградского Университета, 1991 г., С.341-345).
Указанный способ, принятый за прототип, имеет существенный недостаток - низкую повторяемость результатов измерений из-за отсутствия синхронизации внесения механического воздействия на волчок с частотой вращения самого волчка.
Данное изобретение устраняет недостатки и аналога, и прототипа.
Техническим результатом изобретения является возможность регистрации положения и взаиморасположения в пространстве и во времени естественных космических тел (Луны, Солнца и др.).
Технический результат достигается тем, что в способе измерения изменения состояния вращающегося волчка, на который передают колебательное механическое воздействие, измерения проводят индукционным датчиком, с которого регистрируют основную возбужденную гармонику, равную частоте вращения волчка, причем на волчок накладывают тормозящий импульс, синхронизированный с частотой вращения; синхронизированный импульс получают за счет отраженного света от светоотражающего сектора, нанесенного на поверхности волчка, и регистрируют время изменения состояния волчка, а в устройстве для измерения изменения состояния волчка, содержащем волчок, систему регистрации, систему запуска и вибрации, волчок выполнен в виде цилиндра, насаженного на ось двигателя, на внешней поверхности волчка нанесен светоотражающий сектор, волчок с двигателем установлен на платформе из постоянных магнитов, платформа насажена на ось, которая закреплена на стационарном постоянном магните, магниты платформы и магнит стационарный установлены друг к другу навстречу одноименными полюсами, система регистрации выполнена в виде индукционного датчика, расположенного между магнитами платформы и магнитом стационарным, причем выход датчика соединен со входом селективного вольтметра, выход которого соединен с самописцем и одним из выходов двухлучевого осциллографа, на второй вход которого введен синхроимпульс, а система вибрации содержит источник света, оптоволоконные световоды, фотоприемник и тормозящую систему, при этом тормозящая система выполнена в виде постоянного магнита, расположенного на регулировочном винте и стальной пластины, расположенной на боковой поверхности волчка со смещением по азимуту относительно светоотражающего сектора, при этом в нее введен электронный усилитель светового импульса, электронный ключ, стабилизированный источник постоянного напряжения, выходы которого соединены с двигателем волчка или в виде последовательно соединенных электронного импульсного усилителя, ждущего мультивибратора, дополнительного электронного импульсного усилителя, дифференцирующего каскада, второго ждущего мультивибратора, стабилизированного источника постоянного напряжения, соединенного с драйвером, при этом ждущие мультивибраторы и электронный импульсный усилитель соединены с собственным источником питания.
Сущность изобретения поясняется на фиг. 1-24.
На фиг. 1 представлена схема выполнения динамической системы на магнитной подвеске (подушке), где 1 - волчок, выполненный из латуни, имеет массу 265 г. Внешняя поверхность 2 покрыта светопоглощающей краской с микрошероховатостью, кроме светоотражающего сектора 3. Волчок 1 через оловянное уплотнение 4 насажен на ось микродвигателя 5. Волчок 1 с двигателем 5 через кронштейн 6 крепится к платформе 7, выполненной из постоянных магнитов. В центральное отверстие платформы плотно посажена втулка 8 из фторопласта. Все это насажено на ось 9, выполненную из отполированного фторопласта для уменьшения коэффициента трения. Ось 9, в свою очередь, укреплена в стационарно установленном постоянном магните - 10, где 11 - общая установочная платформа из толстостенного дюраля
Направленность друг к другу одноименных полюсов магнита 7 и 10 "N-N" позволяет всей динамической системе находиться на магнитной подвеске (подушке). Сигнал о состоянии всей подвесной системы поступает с индукционного датчика 12, установленного между магнитами 7 и 10. Чувствительность определяется юстировкой и балансировкой с помощью винтов 13 и латунных дисков 14, а также специально установленного в верхней части устройства, подвижного магнита 15 на немагнитной платформе 16. Дюралевый диск 17 с укрепленным на нем кронштейном 18 с оптоволоконными световодами 19 может плавно вращаться на фторопластовой оси 20 и шайбе 21, меняя азимутальное положение относительно поверхности, а точнее - светоотражающего сектора 4. Таким образом, вся эта система выполняет функцию механического фазовращателя.
Испытания показали высокую чувствительность устройства, временную надежность и удобство при эксплуатации. Индукционный датчик 12 устройства не должен иметь механический контакт со стержнем 9, а весь крепеж индукционного датчика 12 и установочные элементы должны быть развязаны от основного устройства.
На фиг. 2 представлены индукционный датчик и схема регистрации (записи) сигнала, где 12 - индукционный датчик, 7 - верхняя плавущая платформа, 10 - стационарно установленные постоянные магниты, пунктиром указаны силовые линии встречнонаправленных магнитных полюсов, 22 - селективный вольтметр (в нашем случае B6-2), 23 - самописец (622.01. endim), 24 - двухлучевой осциллограф, 25 - вход контрольного импульса, 26 - вход сигнала основной гармоники, поданный с тормозящей системы.
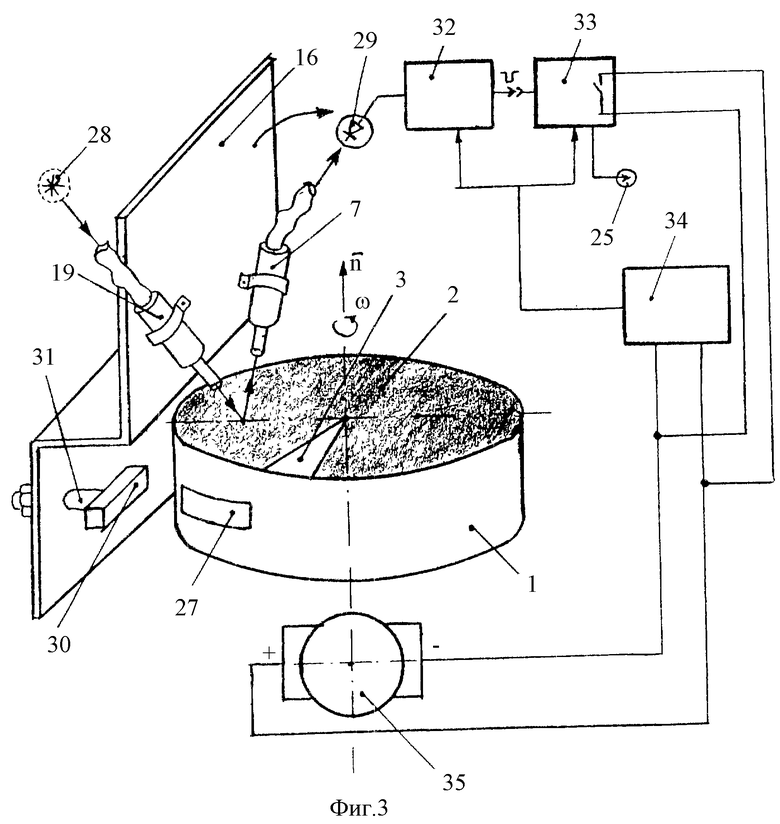
На фиг. 3 представлена тормозящая система, выполненная на основе внешнего механического воздействия, где 1 - волчок, 2 - светопоглощающая поверхность, 3 - светоотражающий сектор, 27 - тонкая стальная фольга (или пластина, в случае пластины необходимо центрировать волчок, чтобы не было биений), 28 - источник света, 19 - оптоволоконные световоды, 29 - фотоприемник, 16 - кронштейн, установленный на вращающемся диске 17 (на данной фигуре не показан), 30 - постоянный магнит, 31 - регулировочный винт, 32 - электронный усилитель светового импульса, 33 - электронный ключ, 34 - стабилизированный источник постоянного напряжения, 35 - электродвигатель, 25 - контрольный импульс.
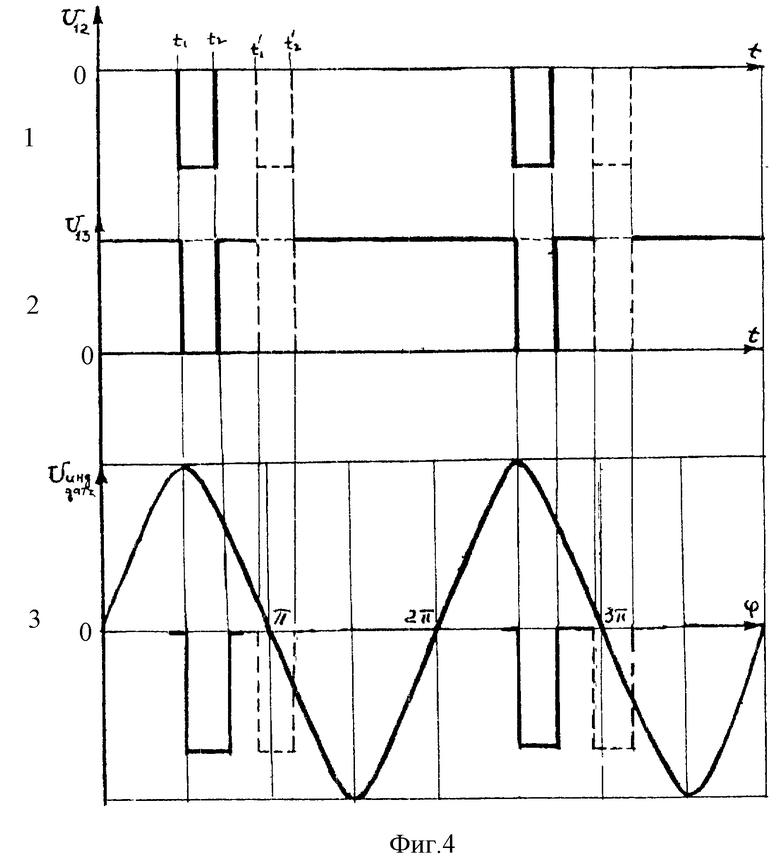
На фиг. 4 представлены временные диаграммы процесса торможения при внешнем воздействии магнитным поле.
График 1. Импульс напряжения U12 на выходе усилителя 32 длительностью (t2-t1), равная длительности светового импульса. (Пунктиром показано новое положение импульса (t2-t1).
График 2. Импульс напряжения U13 на электронном ключе 33 в момент закорачивания источника питания 34.
Временное расположение импульса U13 и есть практически начало действия тормозящего импульса от постоянного магнита 30.
График 3. Гармонический сигнал возбужденных волчком колебаний с индуктивного датчика Uинд.дат. с наложенным на него сигналом тормозящего импульса на вход осциллографа 25.
График 3 представляет картину на экране двухлучевого осциллографа 24. Пунктиром на диаграмме показано новое положение импульса (t2-t1) на временной оси, которое достигается поворотом кронштейна 16 по азимуту (направление поворота показано на фиг. 3 стрелкой) с установленным на нем оптоволоконными световодами 19 и постоянным магнитом 30. Такой поворот кронштейна 16 выполняет роль механического фазовращателя, благодаря которому можно тормозящий импульс установить в любой фазе гармонического колебания. Импульс изображен на графике 3 (фиг. 4).
На фиг. 5 представлена тормозящая система, выполненная на основе исполнения внутреннего механического воздействия на волчок, где 1 - волчок, 2 - светопоглощающая поверхность, 3 - светоотражающий сектор, 19 - световоды (оптоволоконные), 29 - фотоприемник, 28 - источник света, 16 - кронштейн для крепежа световодов, 32 - электронный усилитель, 36 - ждущий мультивибратор, 37 - второй электронный импульсный усилитель, 38 - дифференцирующий каскад, 39 - дополнительный ждущий мультивибратор, 40 - стабилизированный источник постоянного тока, от которого запитаны электронный усилитель 32, ждущий мультивибратор 36, второй электронный импульсный усилитель 37 и дополнительный ждущий мультивибратор. 41 - стабилизированный источник постоянного напряжения для драйвера 42. Электродвигатель - 35 и контрольный импульс - 25.
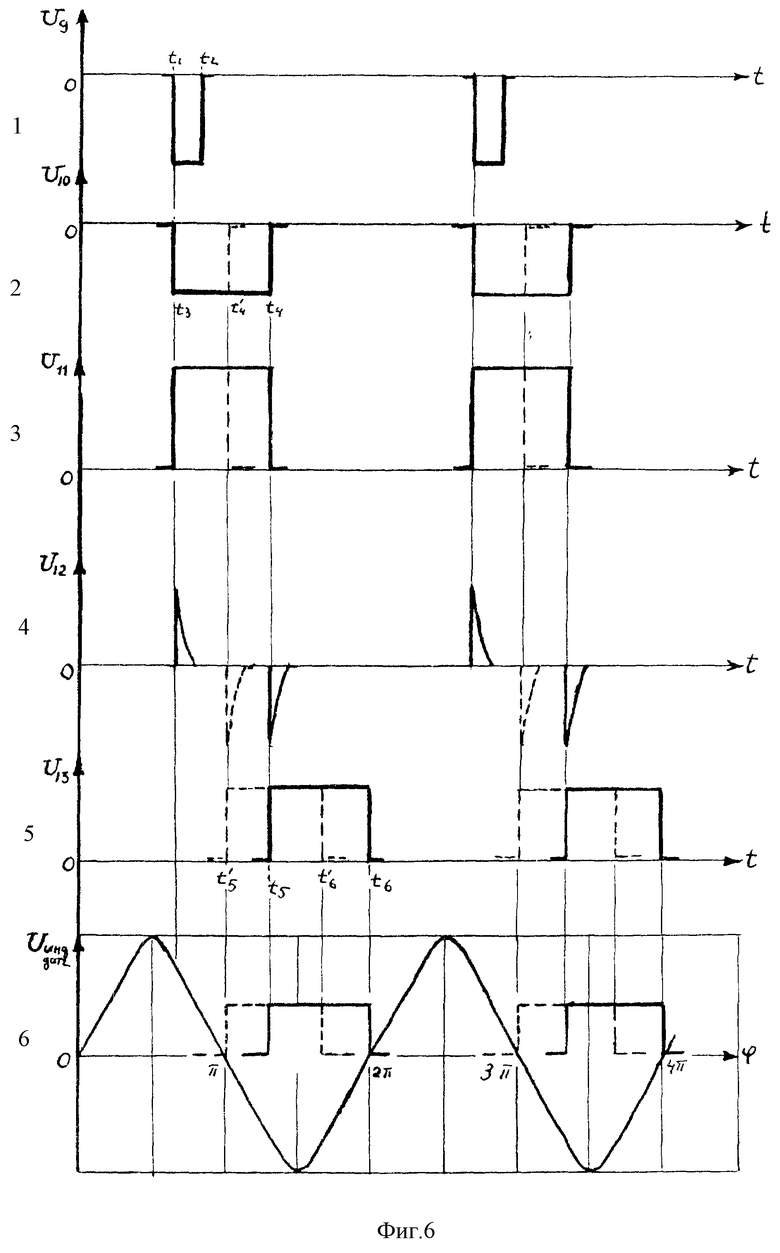
На фиг. 6 представлены диаграммы процесса по внутреннему тормозящему воздействию:
График 1. Импульс напряжения U9 длительностью (t2-t1) на выходе усилителя.
График 2. Импульс напряжения U10 ждущего мультивибратора длительностью (t4-t3), (пунктиром показана новая длительность регулируемого импульса (t4-t3)).
График 3. Импульс напряжения U11 на выходе усилителя 37 (пунктиром здесь показано аналогичное изменение импульса).
График 4. Продифференцированный импульс U12 на каскаде 38 (пунктиром показано новое положение отрицательной производной - уменьшение времени задержки).
График 5. Импульс напряжения U13 на выходе дополнительного ждущего мультивибратора 39 длительностью (t6-t5) (пунктиром показано новое положение импульса (t6-t5)).
График 6. Гармонический сигнал возбужденных волчком колебаний с индукционного датчика Uинд.дат.. с наложенным на него сигналом тормозящего импульса (контрольный импульс с выхода 25). Положение тормозящего импульса на фазе колебания показаны сплошной и пунктирной линией.
Используемый волчок 1 выполнен из латуни диаметром 6,0 см и весом ~ 265 г плотно насажен на ось микродвигателя MMI-62S2RA. Плоская внешняя поверхность волчка покрыта черной светопоглощающей краской, кроме небольшого отражающего сектора 3. Над этой затемненной поверхностью располагаются два оптоволоконных световода 19. По одному световоду подается сфокусированный луч света, а по второму - отраженный от сектора свет (при вращении волчка) поступает в фотоприемник 32 в виде импульса ОН и является синхронизирующим сигналом.
Волчок 1 с электродвигателем 35 установлен на кронштейне 6, который укреплен на платформе 7, выполненной из плоских постоянных магнитов, собранных в брикет. Размеры магнитов 12 см х 8 см х 1,6 см с магнитной индукцией B=0,1 Тл. Под данной платформой 7 располагается брикет из нескольких аналогичных магнитов 10, но уже установленных стационарно на технологической панели 11. Используя силу отталкивания одноименных полюсов, получаем магнитную подвеску волчка. Электропитание к микродвигателю подается по двум отожженным проводам диаметром 0,09 мм, чтобы исключить их механическое сопротивление на чувствительность всей подвесной системы.
Работа устройства и способ измерения заключаются в том, что в первом варианте возбужденные вращающимся волчком 1 механические колебания изменяют магнитное поле между магнитами 7 и 15. Наведенная в индукционном датчике 12 ЭДС подается на вход селективного вольтметра 22, где и выделяется основная гармоника колебания, связанная с частотой вращения волчка. Продетектированный сигнал с вольтметра 22 подается на вход самописца 23, а непродетектированный - на вход осциллографа 24, где на вход осциллографа 25 поступает сигнал синхроимпульса. В результате можно наблюдать в какой фазе основной гармоники располагается синхроимпульс.
Во втором варианте световой импульс, отраженный от сектора 3 вращающегося волчка 1, по световоду 19 попадает на фотоприемник 29 и усиливается импульсным электронным усилителем 32. Этот импульс отрицательной полярности запускает ждущий мультивибратор 36, у которого выходной импульс отрицательной полярности регулируется в пределах 1,0•10-3с•6,0•10-3с. Электронный усилитель 37 переворачивает полярность импульса мультивибратора 36, а каскад 38 дифференцирует данный положительный импульс. Отрицательная производная в этом случае всегда оказывается задержанной относительно положительной производной, а само время задержки определяется длиной импульса с мультивибратора 36, которая изменяется от 1,0•10-3с•-6,0•10-3 с. Следующий ждущий мультивибратор 39 с регулируемой длительностью 1,0•10-3с•-3,5•10-3 с запускается амплитудой отрицательной производной предыдущего каскада и его выходной импульс на временной оси оказывается задержанным относительно светового импульса. Плавность задержки определяется мультивибратором 36. В дальнейшем положительный выходной импульс с мультивибратора 39 подается на вход драйвера 42. Драйвер 42, который запитан от самостоятельного источника постоянного напряжения 41, в отсутствии внешнего импульса с мультивибратора 39 подает непрерывно питание на двигатель волчка (полярность показана в кружках фиг. 5), но с приходом импульса он переворачивает полярность на все время действия импульса с мультивибратора 39 (полярность изображена без кружков). Таким образом, тормозящий импульс волчка расположен внутри самой динамической системы и, кроме того, что он может "перемещаться" по фазе гармонических колебаний за счет задержки (дополнением является механический фазовращатель), длительность его воздействия на волчок 1 также регулируется. Фактически все это осуществляется по двум тонким медным отожженным проводам диаметром 0,09 мм, проходящих на питание двигателя 35.
Стальная фольга 27, наклеенная на боковую поверхность волчка 1, несколько смещена по азимуту относительно отражающего сектора 3 и световода 19. На такой же угол смещен постоянный магнит 30. Это позволяет отраженному импульсу света появиться на фотоприемнике чуть раньше, чем фольга 27 попадет в поле действия магнита 30.
Светоотражающий сектор 3 по своей протяженности равен длине фольги 27 и магниту 30. Импульс света по световоду 19 попадает на фотоприемник 29, с него - на электронный ключ 33, который в течение времени действия импульса закорачивает источник питания 34 электродвигателя 35. Волчок в этот момент, вместе с фольгой, движется по инерции в поле действия постоянного магнита, чем усиливается связь между волчком и магнитом, которая также может регулироваться длиной винта 31. При этом способе полезный сигнал напрямую связан с пространственно-временным расположением космических объектов, в основном Луны и Солнца. Устройство, созданное на этом способе, зарегистрировало моменты восхода и захода Луны и Солнца, точек их кульминации на небосводе, наступление полнолуния, лунные и солнечные затмения, а также прохождение Луной перигея и Землей точек солнцестояния и др.
Все астрономические данные были взяты из Астрономического календаря (Ежегодник. Переменная часть, 1997-1999 г. М. Космоинформ).
В заключение описания следует выделить два ключевых момента. Первый момент заключается в том, что длительность тормозящего импульса перекрывает значительную часть фазы гармонических колебаний ~90o и расположен на вершине полуволны. Характер регистрации сигналов графопостроителем носит вид огибающей низкочастотных биений. Второй момент - длительность тормозящего импульса расположена вблизи вершины полуволны и имеет несколько меньшую длительность. В этом случае характер регистрации сигналов имеет амплитудный вид. Как для первого, так и для второго момента важным является соответствующий подбор частоты вращения волчка и чувствительность всей системы (настройка).
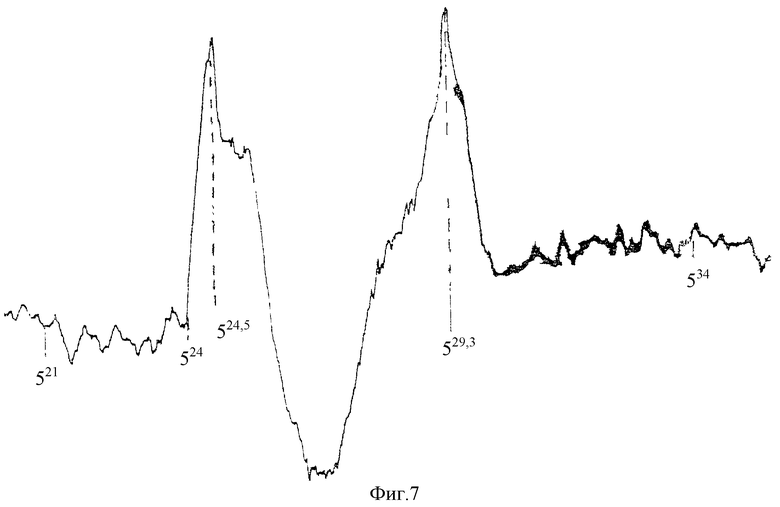
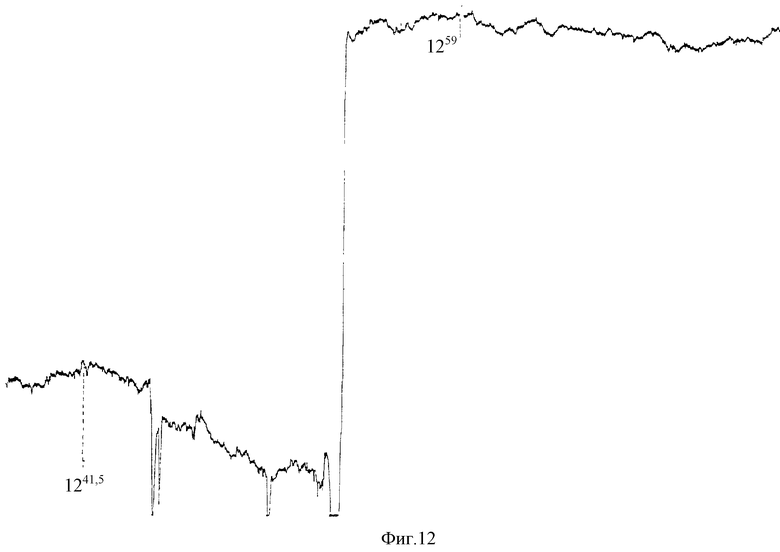
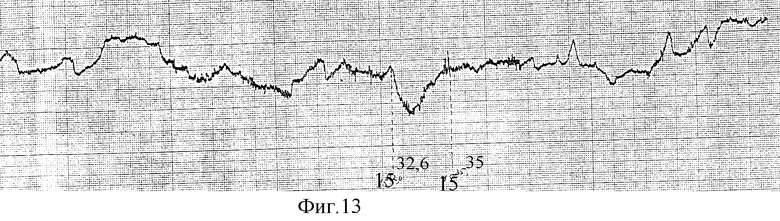
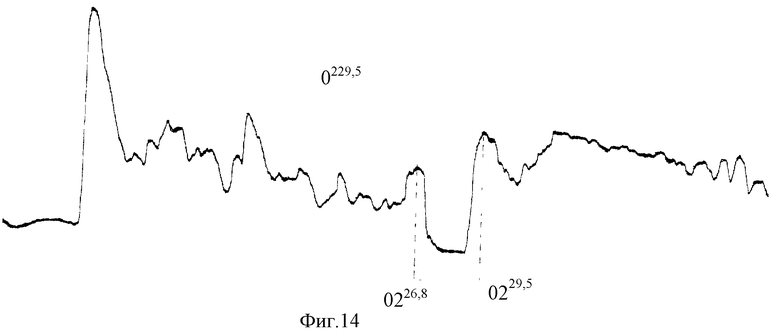
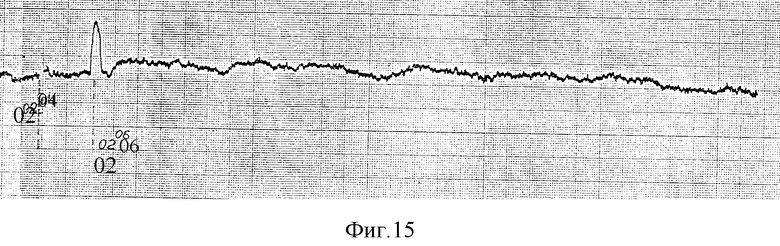
При работе устройства фиксировалось время изменения состояния волчка. В общем случае записывалась фоновая кривая (почти прямая). При восходе (заходе) Луны или Солнца, при прохождении ими перигея или апогея и других моментов, на записи регистрировался всплеск (изменения), при этом время записи результатов фиксировалось постоянно и изменение состояния волчка соответствовало какому-либо явлению.
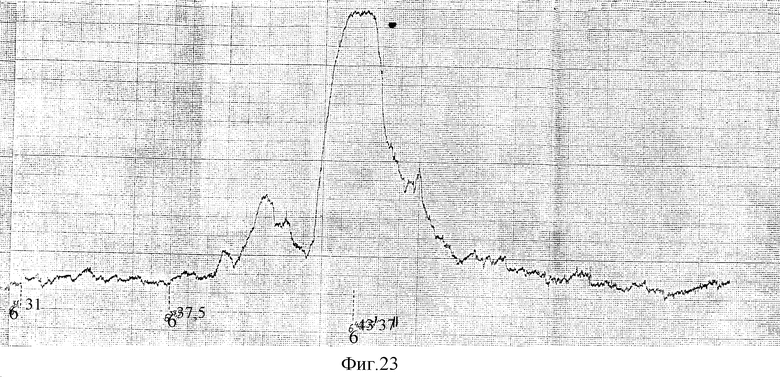
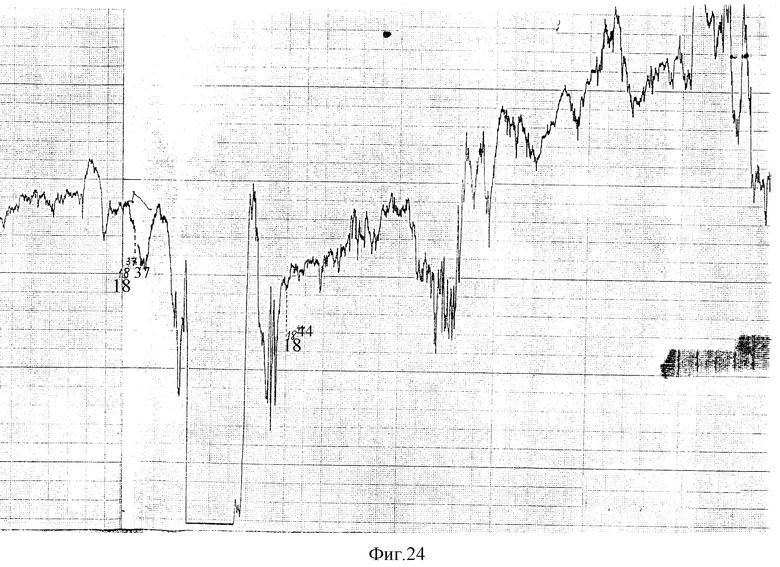
Результаты измерения приводятся на фиг. 7-24 (конкретные записи фиксации изменения состояния волчка, привязанные к Московскому времени). Время указано Московское, координаты: широта 55o 47,69'N, долгота: 37o23,66'E, высота ~ 130 м над уровнем моря, скорость развертки самописца 50/см.
Фиг. 7. Восход Солнца 01.08.96 - в 5 ч. 24 м.
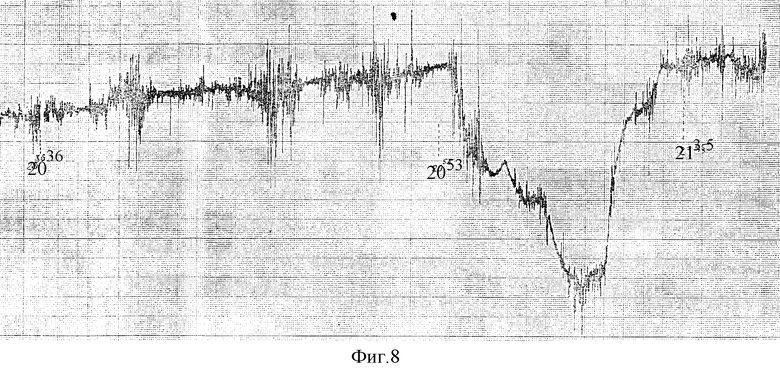
Фиг. 8 Заход Солнца 15.08.98 - в 21 ч. 5 м. 51,5 с.
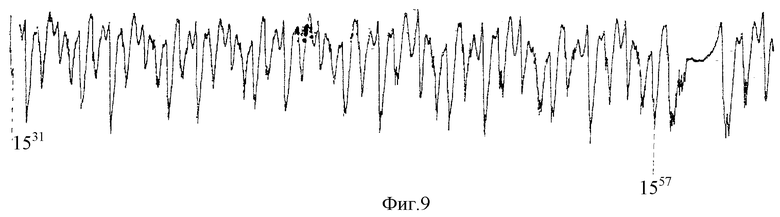
Фиг. 9. Заход Солнца (частотное изображение) 07.12.98 - в 16 ч.55 м. 39 с.
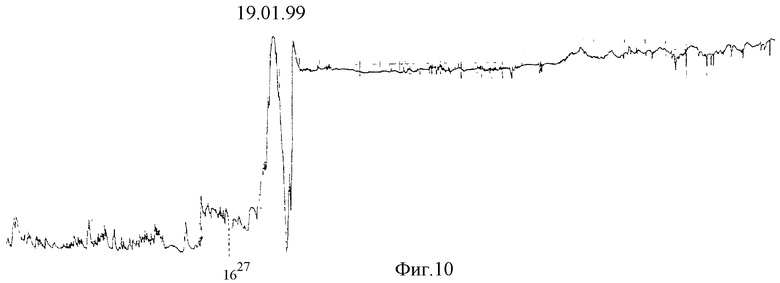
Фиг. 10. Заход Солнца 19.01.99 - в 16 ч. 33 м. 23 с.
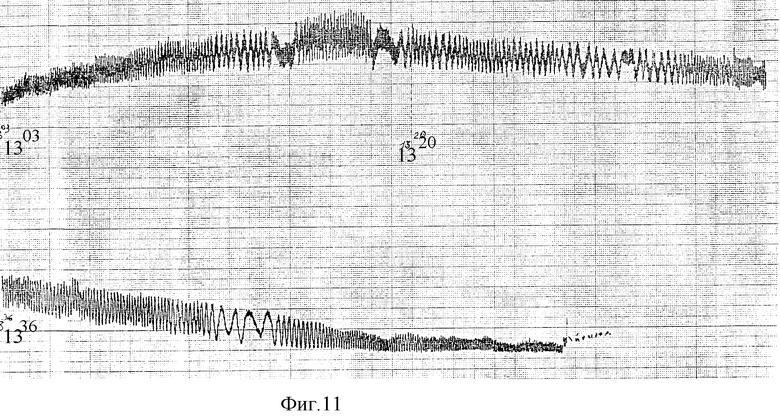
Фиг. 11. Кульминация Солнца 25.06.98 - в 13 ч. 32 м. 32,7 с.
Фиг. 12. Кульминация Солнца 17.01.99 - в 12 ч. 40 м. 1,7 с.
Фиг. 13. Летнее солнцестояние 21.06.98 - в 15 ч. 34 м. 8 с.
Фиг. 14. Зимнее солнцестояние 22.12.98 - в 2 ч. 25 м. 0,57 с.
Фиг. 15. Весеннее равноденствие 21.03.99 - в 2 ч. 17 м.
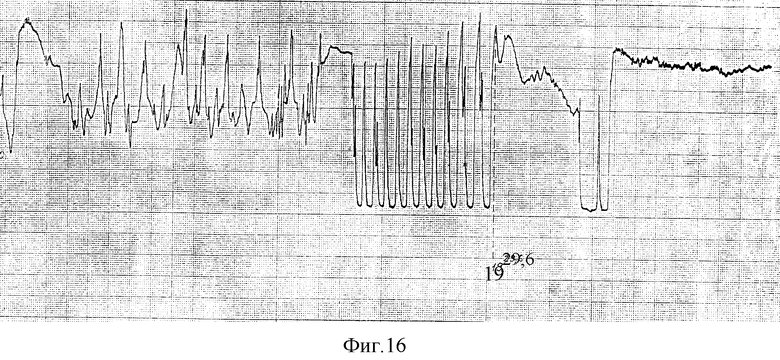
Фиг. 16. Заход Луны (амплитудно-частотный вариант) 13.03.99 - в 19 ч. 29 м. 39,5 с.
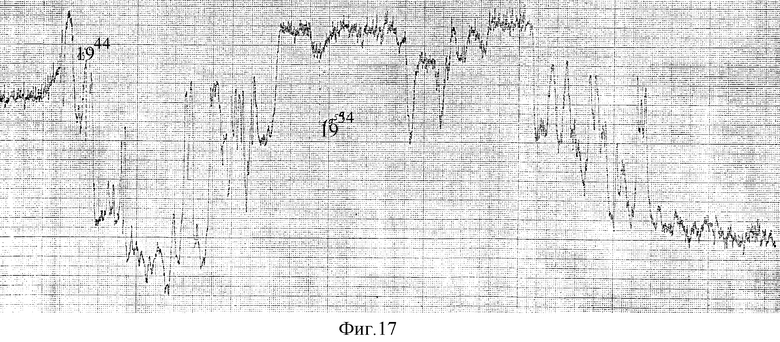
Фиг. 17. Восход Луны 15.01.98 - в 19 ч. 58 м.
Фиг. 18. Заход Луны 17.12.97 - в 10 ч. 47 м.
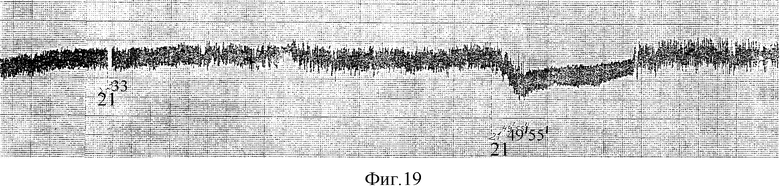
Фиг. 19. Кульминация Луны 03.08.98 - в 21 ч. 49 м. 58 с.
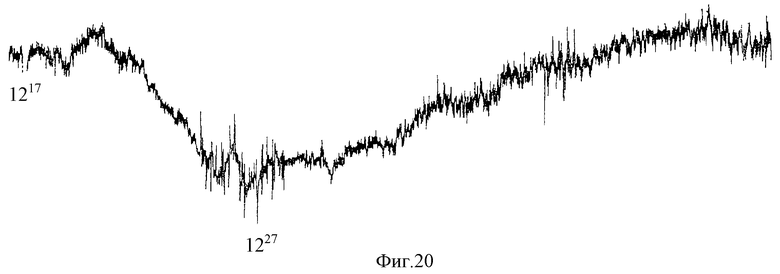
Фиг. 20. Перигей Луны 02.12.98 - в 12 ч. 23 м. 1,6 с.
Фиг. 21. Наступление полнолуния 09.07.98 - в 17 ч. 27 м. 50,5 с.
Фиг. 22. Кольцеобразное солнечное затмение 22.08.98. Геоцентрическое соединение в точке с координатами 147o15,2' восточной долготы и 4o00,2' южной широты в 3 ч. 38 м. 23 с.
Фиг. 23. Кольцеобразное солнечное затмение 22.08.98 (последний контакт) в точке с координатами 155o03,1' западной долготы и 28o46,1' южной широты - в 6 ч. 43 м.
Фиг. 24. Полутеневое лунное затмение 31.01.99 (выход из полутени) - в 18 ч. 54 м. 39,5 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1994 |
|
RU2100777C1 |
| Электронно-оптический шариковый расходомер жидкости | 2024 |
|
RU2826379C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2698106C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661674C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| Оптический датчик перемещений | 1990 |
|
SU1767327A1 |
| ЭЛЕКТРОННЫЙ СПИДОМЕТР | 2000 |
|
RU2183836C2 |
| ОПТОВОЛОКОННЫЙ ПЬЕЗОРЕЗОНАНСНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1996 |
|
RU2098784C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИНТЕРВАЛОВ ВРЕМЕНИ В БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467368C2 |





Использование: в геофизике, астрофизике для измерения гравитационных полей, обнаружения скрытых масс или объектов. Сущность: фиксируют момент изменения состояния вращающегося волчка и по этому времени определяют момент восхода (захода) космических тел, моменты прохождения апогея и перигея, начало затмения и других природных явлений. Технический результат: возможность регистрации положения и взаиморасположения в пространстве и во времени естественных космических тел (Луны, Солнца и др). 2 с. и 2 з.п. ф-лы, 24 ил.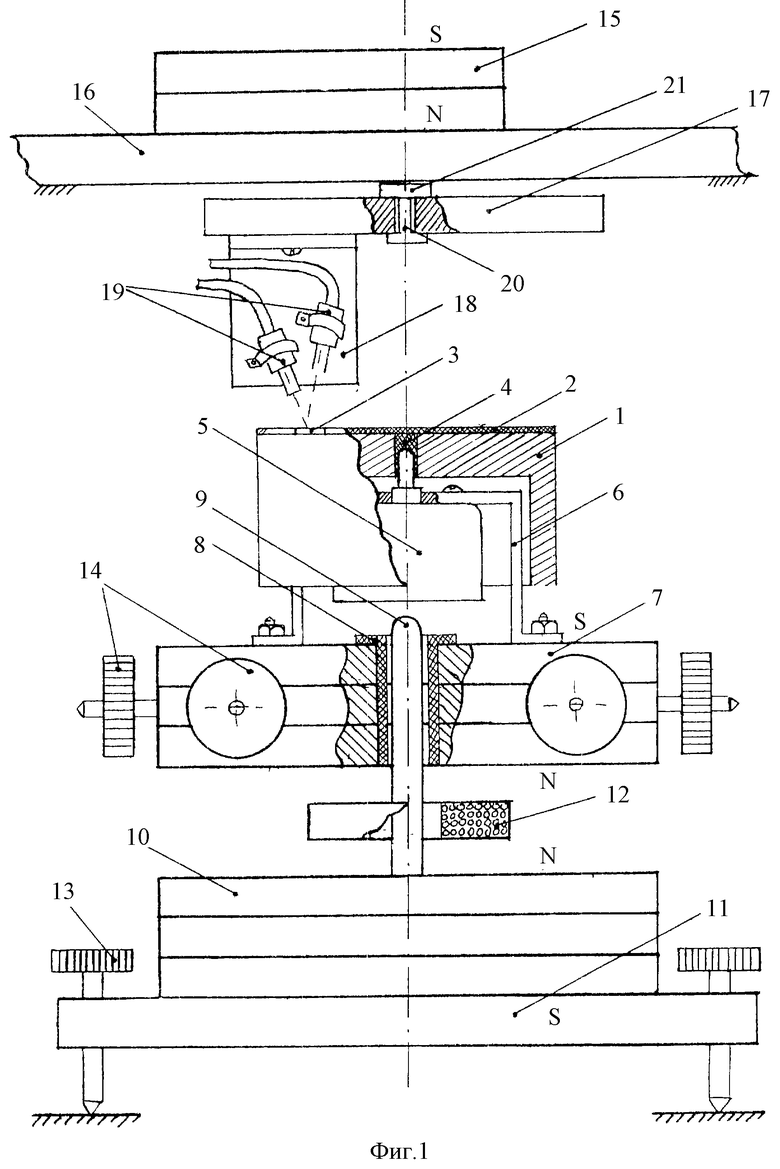
| Козырев Н.А | |||
| Избранные труды | |||
| - Л.: из-во Ленинградского университета, 1991, с.341 - 345 | |||
| DE 1250138, 14.09.1967 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ГРАВИТАЦИОННОГО ВЗАИМОДЕЙСТВИЯ ТЕЛ | 1998 |
|
RU2124743C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| БЕЗЗАЗОРНАЯ ПЕРЕДАЧА | 1995 |
|
RU2085793C1 |
| EP 0675375 A2, 04.10.1994. | |||

