(54) ПРИБОР ДЛЯ ИЗ.МЕРЕНИЯ МАССЫ ТЕЛА V В НЕВЕСОМОСТИ
тывает барабан 4 и прикреплена сродней честью к нему, а концы этой ле1гты прикреплены к противоположным кони )М гшпстипы 2. Ось подэавида пружины 4 саяачиа с ротором датчика поворота 6 и ротором двигателя 7. С пластиной 2 жестко связаны ротор датчика поворота 8 и ротор тохогеиератора 9. Подшипниковые опоры 3 закреплены на неправляюших 10, которые прикрепляются к корпусу космического корабля, Статорные обмотки датчиков поворота подсоедийены к усилителю 11, сигнал с которого юступает на управляющие обмотки двигателя 7, Обмотка тахогенератрра 9 подключена ко входу фop.vlиpoвaтeля 12, выход которого соединен со входом счетчиТСа 13. Пусковой зажим 14 установлен на направляющей 10.
Принцип работы прибора зак.-ючается в следующем..
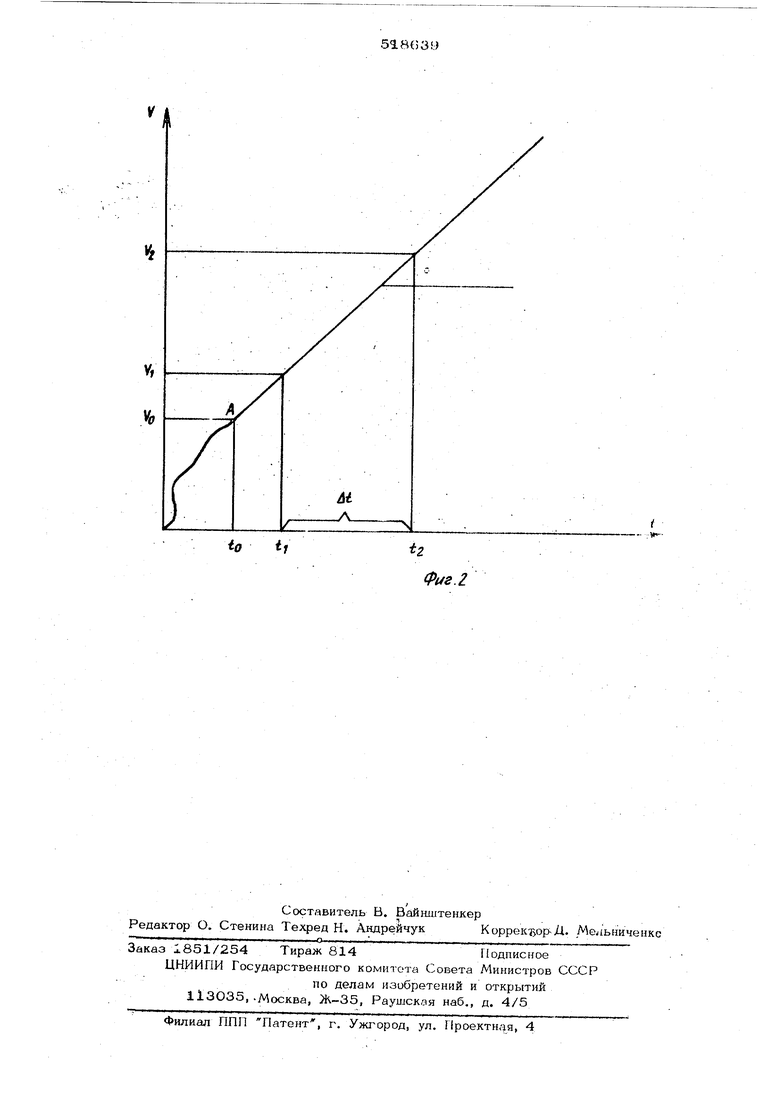
срабатывания пускового зажима 14 под действием момента врашелня барабана 4 со спиральной пружиной, имеющей постоянный натяг, пружинная лента 5, закручиваясь на барабан, поступательно переметает пластину 2| жестко .связанную с креслом 1, на котором закреплено тело, массу котороги измеряем. Мри повороте барабана 4 возникает рассогласование от начального положения между углом поворота осью подзавода пружины 4 и углок поворота барабана 4. Сигнал, пропорциональный этому рассогласованию, измеренный датчиюами 6 и 8, подается на вход усилителя 111, выход :оторбго подключен к управляющим обмоткам двигателя i7. Ротор двигателя 7 поворачивается в направлении, комПенсирующем это рассогласование. После окончания переходного процесса угол закруткк1,Спиральной пружины остается постоянным- :,Следовательно, движение кресла с телом (Происходит под действием постоянной сильь: Процесс измерения массы деформируюшегрся тела, заключается в том, что измеря ;т cKoptxJTb 1 axofenepmopoM О, с которого к/ пряжонио, проггорционгшьноо скорсхгти, поступает на формировптоль 12. При дгх:тижении скорости 1ч формирователь 12 выдает сигнал включения счетчика 13, Значение с,1Орости выбрано таким, чтобы к моменту|. (см. фиг. 2) в объекте и.чмеро.шя закончились переходные процессы, окончание которых пры1сходит к моменту ig , когда скорость движения достигает значения Vg После достижения объектом изм, рения скорости 1 формирователь 12 выключает счетчик 13. При .этом показания табло счетчи:ка 13 пропорциональны величине массы теJna, которая в этом случае однозначно определяется временем, в течение которого происходит заданное приращение скорости.
р - тарированное значение силы; Y,-v, - заданное приращение скорости.
При выборе определяется по фо эмуле -т Ajj -ly .
Формула изобретения
Прибор для измерения массы тела в невесомости, содержащий кресло, пружину, подшипниковые опоры и вычислительное устройство, отличающийся тем, что, с целью повышения точности измерения Классы нежестких тел, поибор снабжен датчиками поворота, двигателем и усилителем, причём статорные обмотки датчиков через усилитель подключены к управляющим обмоткам двигателя, ротор которого соединен с одним концом пружины, а вычисл:;тельное устройство выполнено в виде тахогенератора, ротор-которого связан с другим концом пружины и подсоединен выходными обмотками через формирователь, к счетчику времени, отградуированному в единицах
массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для контроля асинхронного хода синхронного электродвигателя | 1987 |
|
SU1474819A1 |
| Вентильный электропривод | 1988 |
|
SU1791923A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Устройство для стабилизации скорости асинхронного двигателя | 1978 |
|
SU765966A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1330725A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ ТРАЕКТОРИЙ | 1973 |
|
SU397929A1 |
| Система для управления приводами гравиметра | 1977 |
|
SU1141367A1 |
| Устройство для формирования сигнала рассогласования | 1985 |
|
SU1317394A1 |
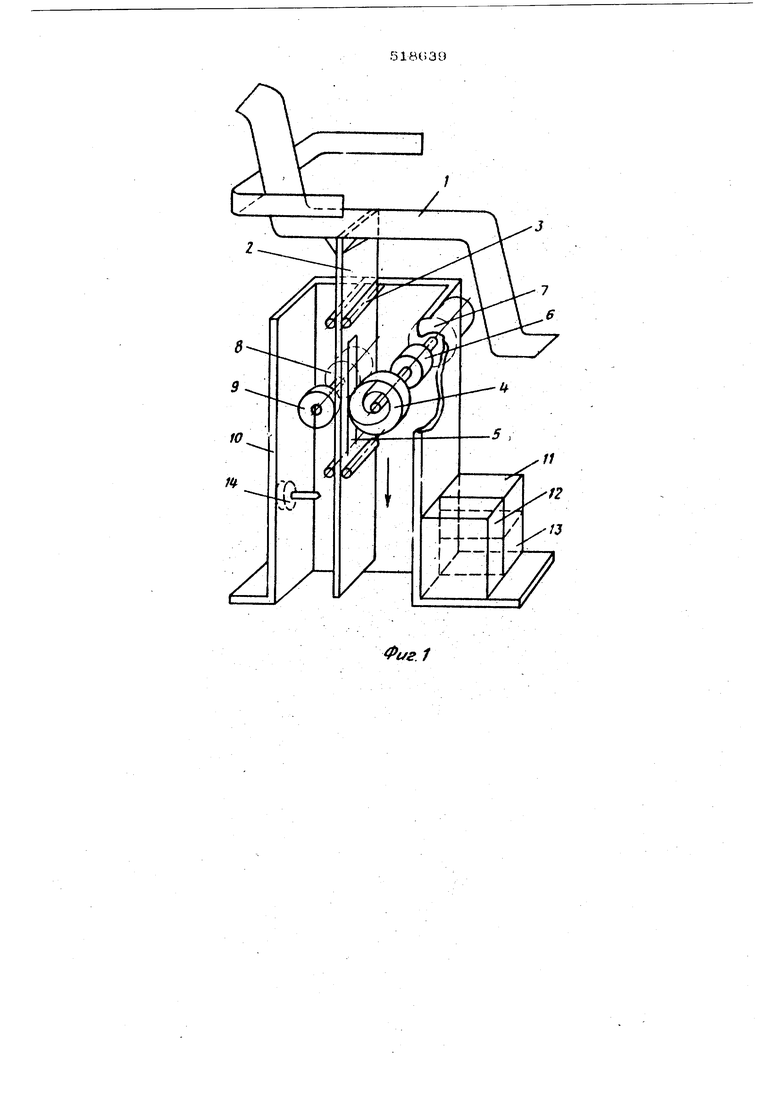
Фиг. 1
V,
0
Ai л
io
i
t2
Фиг. г
