Изобретение относится к автоматизации измерений с гравиметрами, предназначенными для дискретных наблюдений.
Известны гравиметры, предназначенные для дискретных наблюдений на дне моря, которые требуют участия оператора в процессе измерений, управляющего на расстоянии приводами компенсационного и диапазонного устройств гравиметра 1 .
Недостатком таких гравиметров является наличие кабельной связи с судном и, следовательно, ограничение глубины погружения длиной кабеля.
Известна фотоэлектрическая следящая система, содержащая в качестве источника сигнальных импульсов фотоэлектрический датчик, представляющий собой совокупность источника света, оптико-механической системы и фотоэлемента, предварительный четырехкаскадный усилитель, тиратронный усилитель мощности и потенциометрический формирователь напряжения рассогласования, электромашинные усилитель мощности и два исполнительных двигателя. В основу системы заложен фазоимпульсный метод определения отклонения маятника 2.
Однако в этой системе поступление информации рассчитано только от фотоэлектрического датчика, а поэтому программное управление приводами в системе отсутствует и она не может быть использована для управления приводами гравиметра.
Известна система для управления приводами гравиметра, которая сод.ержит фотоэлектрический датчик положения маятника, предварительный усилитель, потенциометрический датчик угла поворота микрометрического винта, усилитель 1мощности, два двигателя, валы которых механически соединены с фотоэлектрическим датчиком положения маятника, а вал пер ВОРС двигателя - с потенциометрическим датчиком угла поворота микрометрического винта и двумя концевыми выключателями, логические элементы ИЛИ, ЗАПРЕТ, два триггера, два реле, три логических элемента И, нуль-орган Сз J.
Система работает в соответствии с таблицей истинности логики с автоматической перестройкой диапазона измерений и совершенно исключает оператора из процесса измерений.
Однако логическая схема требует подачи таких сигналов с нуль-органа, длительность которых должна быть на порядок меньше времени, необходимого на переключение логических элементов. В противном случае могут появиться ложные срабатывания системы.
Целью изобретения является увеличение надежности.
Поставленная цель достигается тем, что в системе установлен тиристорный счетчик со входами счетным, пусковым и Сброс и тремя выходами причем счетный вход соединен с выходом нуль-органа, пусковой вход с концевыми переключателями, первый выход - с обмоткой первого реле, второй выход - с обмоткой второго реле, третий вькод - с входом Сброс а выходы фотоэлектрического и потенциометрического датчиков посредством контактов первого реле подключены к входу предварительного усилителя, выход которого соединен с входами усилителя мощности и нуль-органа.
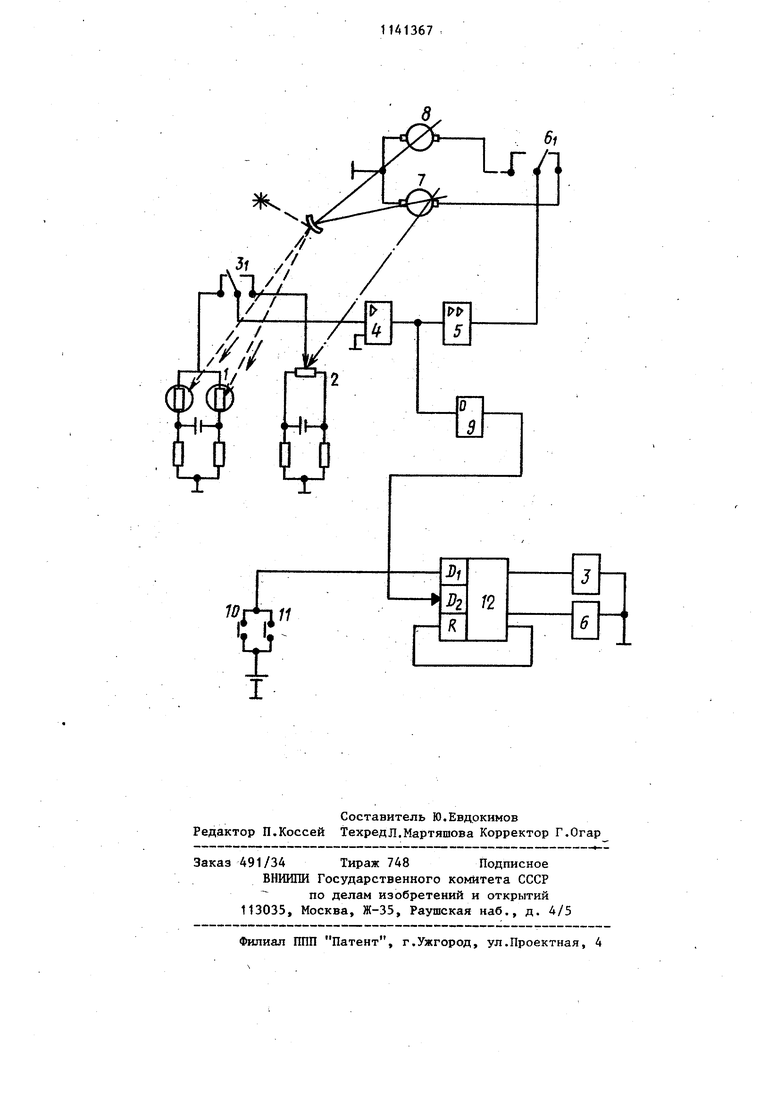
На чертеже изображена система для управления приводами гравиметра.
Система содержит фотоэлектрический датчик 1 положения маятника, например фоторезистор, включенный по мостовой схеме с источником света, потенциометрический датчик 2 угла поворота микрометрического винта, например многооборотный потенциометр включенный по мостовой схеме. Выходы фотоэлектрического и потенциометрического датчиков через контакты 3 и реле 3 подключены ко входу предусилителя 4, выполненного на микросхемах 140-й серии. Выход предусилителя 4 подключен на вход усилителя 5 мощности, вьрсод которого через контакты 6, реле 6 подключен к исполнительным двигателям 7 и 8, установленным на приводах компенсационного и диапазонного устройств. Кроме того, выход предусилителя 4 подключен на вход нуль-органа 9. Система содержит концевые переключатели 10 и 11, установленные на приводе компенсационного устройства и подключенные к пусковому входу D тиристор ного счетчика 12 с тремя счетными выходами. К счетному входу D2 счет-, чика 12 подключен выход нуль-органа 9. 3 Первый счетный выход счетчика 12 соединен с обмоткой реле 3. Второй счетный выход счетчика 12 соединен с обмоткой реле 6. Третий счетньй выход соединен с входом Сброс сче чика 12. Система для управления приводами гравиметра работает следующим образом. В исходном положении компенсацио мое устройство гравиметра находится в рабочем диапазоне, концевые переключатели 10 и 11 разомкнуты, реле и 6 обесточены. Сигналы рассогласования с фотоэлектрического датчика через нормально замкнутые контакты 3 реле 3 поступают на предусили тель 4, затем на нуль-орган 9 и уси литель 5 мощности. С выхода усилителя 5 мощности сигнал рассогласования через нормально замкнутые контакты 6, реле 6 поступает на исполнительный двигатель 7, установ ленный на приводе компенсационного устройства. Таким образом, маятник выводится в исходное положение и удерживается в нем до окончания регистрации. Если компенсационное устройство выпадает из рабочего диа пазона, то замыкается один из концевых переключателей 10 или 11. При этом на пусковой вход счетчика 12 подается разрешающий импульс, происходит сдвиг единицы в первую счетную ячейку и срабатывает реле 3 Ко входу предусилителя 4 через контакты реле 3 подключается потен;циометрический датчик 2, сигнал рас согласования с которого усиливается предусилителем 4 и подается на нуль оргаи 9 и усилитель 5 мощности. С выхода усилителя 5 мощности сигна рассогласования через нормально замкнутые контакты 6 реле 6 поступает на исполнительный двигатель 7. В момент компенсации сигнала рассогласования нуль-орган 9 выдает импульс, поступающий на счетный вход счетчика 12 и сдвигающий единицу 7Л во вторую счетную ячейку. Срабатыва ет реле 6, реле 3 возвращается в исходное положение. Поскольку после компенсации сигнала рассогласования с датчика 2 компенсационное устройство находится в середине рабочего диапазона, то концевые переключатели 10 и 11 разомкнуты. Сигнал рассогласования с фотоэлектрического датчика 1 через нормально-замкнутые контакты 3,, реле 3 поступает на вход предуснлителя 4, а также на вход нуль-органа 9 и на вход усилителя 5 мощности. С выхода усилителя 5 мощности сигнал рассогласования через контакты 6 реле 6 подается на исполнительный двигатель 8, установленный на приводе диапазонногр устройства. При компенсации сигнала рассогласования через диапазонное устройство с выхода нуль-органа 9 на счетчный вход счетчика 12 подается сдвигающий импульс, происходит сдвиг единицы в третью счетную ячейку, и реле 6 возвращается в исходное положение. С третьего счетного выхода счетчика 12 поступает сигнал на вход Сброс счетчика 12, возвращая всю систему в исходное положение. При этом концевые переключатели 8 и 9 разомкнуты, реле 3 и 6 обесточены, т.е. система снова нахо дится в рабочем положении. Экономическая эффективность от внедрения автоматического морского донного гравиметра с системой для управления приводами гравиметра как в области шельфа, так и в области континентального склона за щестимесячный морской период работ с одним экземпляром автоматического морского донного гравиметра составляет около 215 тыс. руб. Наличие в гравиметре предлагаемой спстемы исключает оператора из процесса измерений, обеспечивает надежность повьшает экономичность и упрощает ее конструкцию.
ч
5;
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления и контроля привода гравиметра | 1980 |
|
SU954924A1 |
| Устройство для управления приводами гравиметра | 1977 |
|
SU947819A1 |
| Система для управления приводами гравиметра | 1975 |
|
SU658403A1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| ДОННЫЙ ГРАВИМЕТР | 1967 |
|
SU201680A1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ В ДВИЖЕНИИ | 1965 |
|
SU175257A1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| Телеуправляемый кварцевый гравиметр | 1982 |
|
SU1092455A1 |
| Гравиметр для съемки в движении | 1984 |
|
SU1182465A1 |
СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ rPABIiMETFA, содержащая фотоэлектрический датчик положения маятника , включенный по мостовой схеме, потенциометрический датчик угла поворота микрометрического винта, два двигателя,, первое и второе реле. нуль-орган, предварительный усилитель, усилитель мощности, выход которого через контакты второго реле подключен к двигателям, валы которых механически соединены с фотоэлектрическим датчиком положения маятника, а вал первого двигателя - с потенциометрическим датчиком угла поворота микрометрического винта и двумя концевыми переключателями, о т л ичающаяся тем, что, с целью увеличения надежности, в ней установлен тиристорный сметчик с входами счетным, пусковым и Сброс и тремя выходами, причем счетный вход соединен с выходом нуль-органа, пусковой вход - с концевыми переключателяьм, W первый выход - с обмоткой первого реле, второй выход - с обмоткой вторрго реле, третий выход - с входом Сброс, а выходы фотоэлектрического и потенциометрического датчиков посредством контактов первого реле подключены к входу предварительного усилителя, выход которого соединен с входами усилителя мощности и нульсо органа . Од 
у
2
Г2
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веселов К.Е., Согитов М.У | |||
| Гравиметрическая разведка | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фотоэлектрические следящие системы, 1%9, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| S | |||
