плотности корма на пути движения разгрузчика. Под БОЗл ействием сигнала от датчика электромагнит, встроеиный в привод, растормаживает выходной вал привода, а электродвигатель привода поворачивает его и привод включается. В обесточенном состоянии электродвигателя выходной вал привода заторможен.
В случае наклона рабочего органа при работе разгрузчика ролик скатывается вниз вместе со шнеком, что приводит к срабатыванию датчика 7, выдающего команду «запрет на датчик 8 и сигнал на работу привода 1, который посредством параллелограммного механизма .опирается на подпружиненный ролик и поворачивает шнек до горизонтального полол ения, после чего сигнал от датчика 7 исчезает, и привод отключается.
При работе привода от сигнала датчика 7 перемеш;ение пластины 4 в направлении к стенке башни значительно больше, чем ее перемеш;ение при поджатии ролика. Поэтому после многократных включений привода 1 пластина поворачивается до положения, при котором срабатывает датчик 11. Сигнал от последнего включает реле времени 12, выдающее «запрет работы на датчики 7 и 8. При этом включается привод 1, и пластина 4 отводится до вертикального положения, после чего реле
времени отключает привод 1 и снимает «запрет работы с датчиков 7 и 8. Одновременно с поворотом пластины до вертикального положения происходит подъем скатившегося во время работы ролика на прежний уровень.
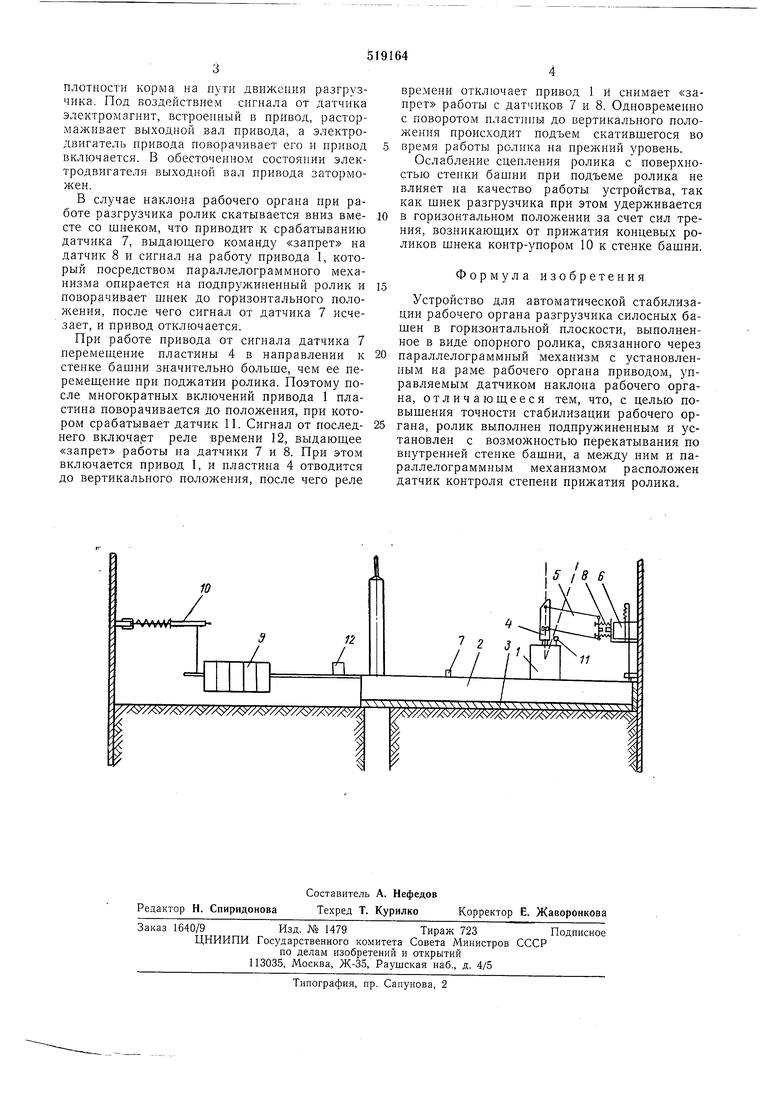
Ослабление сцепления ролика с поверхностью степки башии при подъеме ролика не влияет на качество работы устройства, так как шнек разгрузчика при этом удерживается в горизонтальном положении за счет сил трения, возникающих от прижатия концевых роликов шнека контр-упором 10 к стенке башни.
Формула изобретения
Устройство для автоматической стабилизации рабочего органа разгрузчика силосных башен в горизонтальной плоскости, выполненное в виде опорного ролика, связанного через параллелограммный механизм с установленным на раме рабочего органа приводом, управляемым датчиком наклона рабочего органа, отличающееся тем, что, с целью повышения точности стабилизации рабочего органа, ролик выполнен подпружиненным и установлен с возможностью перекатывания по внутренней стенке башни, а между пим и параллелограммным механизмом расположен датчик контроля степени прижатия ролика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разгрузчик силосных башен | 1969 |
|
SU513667A1 |
| Разгрузчик сенажных башен | 1986 |
|
SU1380669A1 |
| Рабочий орган разгрузчика силосных башен | 1980 |
|
SU854317A1 |
| Механический донный разгрузчик цилиндрических бункеров для слеживающихся и зависающих сыпучих материалов | 1960 |
|
SU139612A1 |
| Разгрузчик грубых кормов из башенных хранилищ | 1980 |
|
SU869667A1 |
| Разгрузчик грубых кормов из башенных хранилищ | 1974 |
|
SU549104A2 |
| Разгрузчик ленточных конвейеров | 1980 |
|
SU874489A1 |
| Рабочий орган разгрузчика сенажных башен | 1986 |
|
SU1407443A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Плавучий док | 1983 |
|
SU1131764A1 |
,// // //y//f)//y
I
.
I
