Во всех без исключения съемочных геодезических и маркшейдерских работах требуется привязка снимаемого полигона к пунктам (их должно быть не менее двух), имеющим координаты в известной системе, а следовательно, и направление, т.е. азимут линии, соединяющей привязочные пункты.
Эта привязка, преследующая также цель перенесения или, что то же, передачи азимута, осуществляется путем измерения соответствующих углов соответствующими угломерными инструментами без магнитной стрелки или же, прибором, снабженным магнитной стрелкой.
Вообще же, очевидно, что во многих случаях знать направление линии или плоскости в пространстве совершенно необходимо.
Как уже упоминалось выше, перенос направления (азимута) осуществляется при помощи упомянутых выше инструментов.
Предлагаемый передвижной ориентир позволяет механически, по любому направлению непрерывного для колес пути, переносить-передавать азимут линии.
В процессе перенесения азимута линии, посредством предлагаемого ориентира, не требуется вести измерений углов и длин.
В том же процессе не требуется, следовательно, применения отдельных угломерных инструментов (как с визирным устройством, с магнитной стрелкой, так и без нее).
Все это делается механически.
Названные выше инструменты могут быть использованы как вспомогательные, в момент определения азимута линии, лежащей в передвижном механическом ориентире, но не в процессе перенесения азимута.
При работе требуется непрерывность пути для перемещения передвижного механического ориентира на колесах (вода и т.п. не могут быть путем).
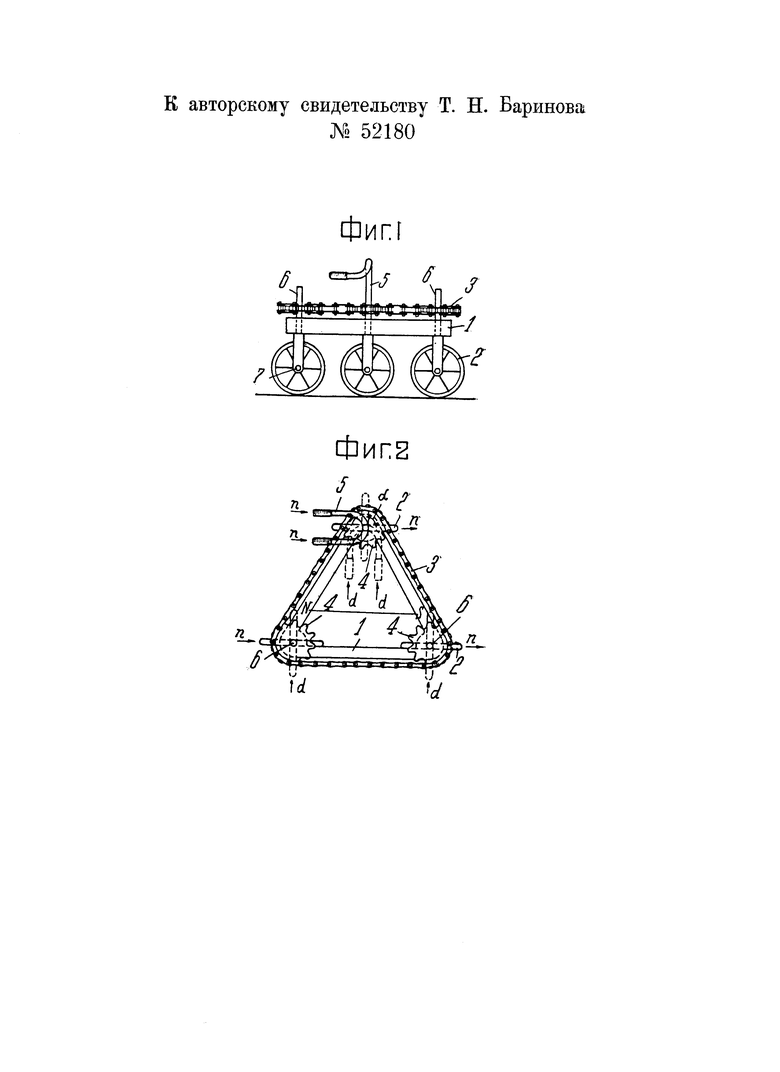
На чертеже фиг. 1 изображает примерный вид сбоку передвижного механического ориентира и фиг. 2 - вид его сверху.
Передвижной механический ориентир представляет собою повозку с рамой, снабженной не менее, чем тремя колесами, и рулем, связанными в одну взаимодействующую систему.
Колеса 2 имеют горизонтальные 7 и вертикальные 6 оси. Вертикальные оси колес вставляются в дыры, специально для этого сделанные, например, в вершинах треугольной рамы 1. Треугольная рама 1 таким образом установлена на трех колесах, из коих каждое может вращаться соответственно вокруг своих вертикальной и горизонтальной осей.
На выступающие из рамы концы вертикальных осей 6 надеваются шестерни 4 и наглухо скрепляются с осями. Шестерни охватываются бесконечной цепью 3 так, чтобы вертикальные плоскости, проведенные вдоль образующих горизонтальной оси каждого колеса, были параллельны между собой. Плоскости колес также будут параллельными между собой.
На одну из вертикальных осей колес, делаемую более длинной, прикрепляется руль 5.
Таким образом, ориентир может передвигаться в любом направлении, т.е., под действием приложенной силы, ориентир может иметь не только поступательное движение по прямой линии, но и менять направление его.
Изменение направления движения ориентира осуществляется при помощи руля 5 силой, к нему приложенной. Передвижной механический ориентир по принципу устройства, при изменении направления его движения, не может изменить направления азимута любой линии, лежащей в нем, но так как ориентир (за исключением особо движущихся его частей - колес с их осями, шестерен и т.д.) можно представить, как взаимодействующую систему, составленную из множества линий, фигур и т.д., также не изменяющих своего азимута во время перемещения его в любом направлении его пути, то ясно, что и самый ориентир не изменяет своего азимута при описанном принципе перемещения его на поверхности во всевозможных направлениях.
Если сила, приложенная к рулю, действует в направлении n, указанном стрелками, то весь ориентир по принципу своего устройства, под влиянием приложенной силы, будет перемещаться в том же направлении.
Пусть в ориентире лежит линия NS, азимут которой совпадает с направлением n действия силы и перемещения ориентира.
Тогда ясно, что при перемещении ориентира в указанном направлении действия силы в том же самом направлении будет перемещаться и линия NS.
Если повернуть на угол α руль (положение, указанное на фиг. 2 пунктиром), то все колеса 2, будучи связаны цепью 3, повернутся на тот же угол α от первоначального своего направления. При перемещении передвижного механического ориентира в направлении α, указанном другими стрелками, т.е. под углом α к только что рассмотренному направлению движения, линия NS будет также перемещаться вместе с ориентиром, поскольку она в нем находится. Совершенно очевидно также, что линия NS, в данном случае, будет перемещаться только параллельно самой себе и никак иначе, но такое перемещение линии NS, в приводимом направлении d действия силы, совершенно не изменяет азимута линии NS, а это и есть то, что требуется сохранить при любых направлениях пути перемещения ориентира. Очевидно, что если поворачивать при движении прибора руль (значит и колеса) на любой угол, то линия NS будет перемещаться только или параллельно самой себе или вдоль своей оси.
Приведенного выше достаточно для доказательства того, что изменения направления пути движения передвижного механического ориентира, под любым углом α к первоначальному направлению, независимы от азимута движущейся вместе с ориентиром, но неподвижной на нем любой линии. Это достигается только при условии особой здесь описанной конструкции ориентира и непрерывности поверхности, по которой передвигается ориентир (переводится азимут).
Описанный принцип действия передвижного механического ориентира будет полностью сохраняться, если даже он конструктивно будет оформлен и иначе. Изложенная в описании конструкция имеет целью показать принцип механического ориентирования инструмента в движении по любому направлению непрерывного пути. Этот принцип (основной) будет сохранен и в случаях, если конструкция передвижного механического ориентира будет отлична от описанной. Так, например, принцип механического ориентирования инструмента не нарушится, если вертикальные поворотные оси колес будут установлены и не на вершинах и даже не на треугольной раме.
Оси можно установить в каком угодно месте рамы любой формы: сплошной плоской, сферической, формы круга, многоугольной и т.д. Их также можно установить в треугольной раме, но не в вершинах ее, а посредине сторон и т.д., но количество колес должно быть не менее трех.
Вместо бесконечной цепи можно поставить в центре рамы центральную шестерню с приделанным к ней рулем так, чтобы она зубьями сцеплялась с шестернями, жестко насаженными на вертикальные оси колес, и тогда поворот руля на некоторый угол вызовет поворот всех колес на тот же угол.
Шестерни и цепь можно заменить жестко насаженными на вертикальные поворотные оси колес роликами, охватив их бесконечным ремнем, или же заменить ролики и ремень, шестерни и цепь рычагами и т.п. - от этого также не изменится принцип механического ориентирования.
Передвижной механический ориентир может быть использован, например, в маркшейдерской практике как для ориентировки съемки, так и для дачи направления.
1. Передвижной механический ориентир, отличающийся тем, что, с целью переноса азимута линий без измерения углов и длин в процессе переноса, он состоит из повозки с одной рамой любой формы, снабженной не менее, чем тремя колесами, имеющими горизонтальные и вертикальные оси вращения, и одним рулем, связанных во взаимодействующую систему, которая, при передвижении в любом направлении по поверхности приложенной к ней силой, не изменяет своего направления в пространстве.
2. Форма выполнения ориентира по п. 1, отличающаяся тем, что вертикальные оси колес, соответственно каждая установленные в специальных для них отверстиях в раме повозки, снабжены жестко насаженными шестернями или глухими роликами, охватываемыми бесконечной цепью или таким же ремнем, с тою целью, чтобы при повороте одного из колес на некоторый угол, все колеса поворачивались на тот же угол, и всякая линия, нанесенная на раме, при этом сохраняла свое направление в пространстве неизменным.
3. В ориентире по пп, 1 и 2 применение на одной из вертикальных осей руля для управления движением ориентира.
