1
Изобре-гение относится к области измерительной техники и может быть использовано для измерения параметров вращательного движения и для выработки сигналов коррекции в системах управления и регулирования.
Наиболее простым методом получения сигнала, пропорционального угловому ускорению вращающегося вала, является метод однородного дифференцирования сигнала скорости с тахогенератора или двойного дифференцирования сигнала датчика положения 1, 21.
Известные датчики угловых ускорений, содержащие индукционный фазовращатель, фа зочувстви-тельный выпрямитель и дифферен- цирующие цепи, имеют в выходном сигнале значительные помехи ГЗ. Это объясняется тем, что остаточные напряжения фазовращателя, фазочувс-твительного выпрямителя и их фоновые составляющие подчеркиваются дифференцирующими цепями, а полезный сигнал ослабляется из-за неидеальности дифферецирующих цепей. Введение дополнительных фильтров приводит к ухудщению динамически свойств датчика углового ускорения,
Цель изобретения - повышение точности дифференцирования и помехозащищенности.
Зго достигается тем, что в предлагаемое устройство дополнительно введено множительное устройство, входы которого подключены к выходам индукционного фазовращателя и фазосдвигадащей цепи, а выход - к входу элемента сравнения, при этом второй вход фазосдвигаюшей цепи подключен к выходу цепи обратной связи дифференцирующего устройства.
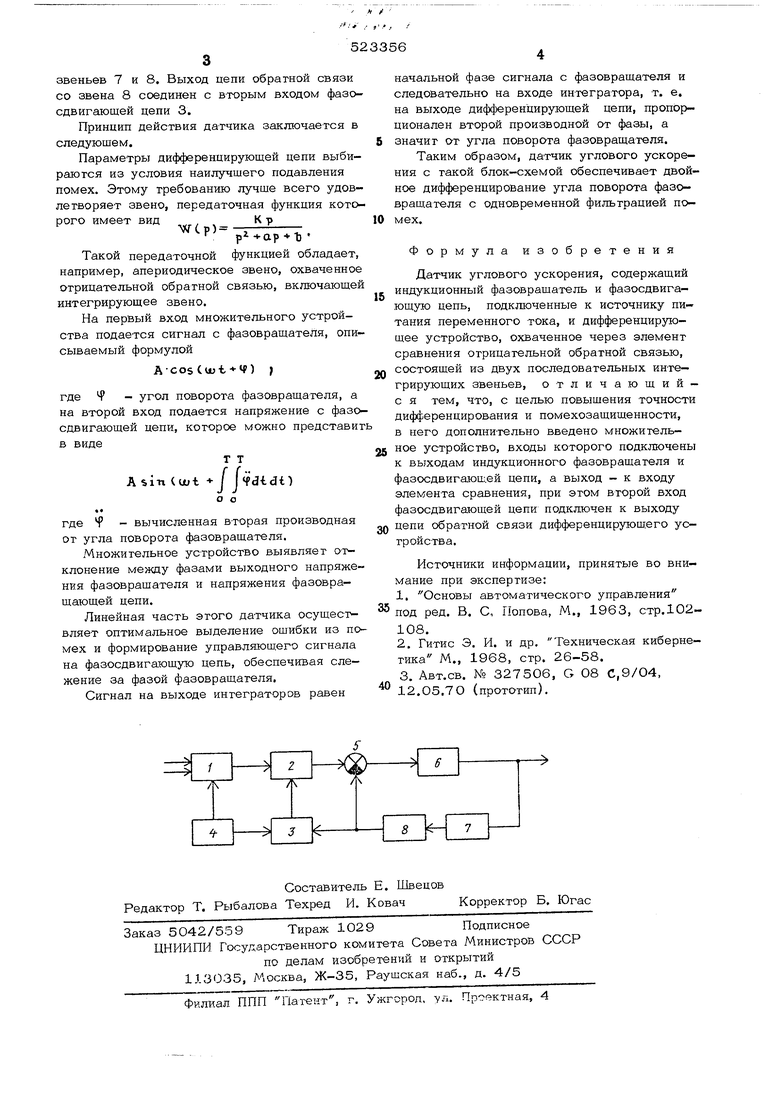
На чертеже показана блок-схема датчика угловых ускорений.
Датчик состоит из индукционного фазовраща-теля 1, множительного звена 2, входы кот-орого подключены к фазовращателю и фа- &осдвигающей цепи 3, и источника 4 питани переменного тока, подключенного к фазовращателю и фазосдвигающей цепи. Выход множительного звена через элемент сравнения 5 подключен к дифференцирующему устройству. Дифференцирующее устройство состоит из дифференцирующей цепи 6, охваченной отрица-тельной обратной связью, состоящей из последовательно включенных интегрирующих звеньев 7 и 8. Выход цепи обратной связ со звена 8 соединен с вторым входом фаз сдвигающей цепи 3. Принцип действия датчика заключается следующем. Параметры дифференцирующей цепи выби раются из условия наилучшего подавления помех. Этому требованию лучше всего удо летворяет звено, передаточная функция кот рого имеет видК р WC р) -; р -t-ap + t) Такой передаточной функцией обладает например, апериодическое звено, охваченно отрицательной обратной связью, включающе интегрирующее звено. На первый вход множительного устройства подается сигнал с фазовращателя, опи сываемый формулой Acos Cujt+ 4) ) где Ч - угол поворота фазовращателя, а на второй вход подается напряжение с фаз сдвигающей цепи, которое можно представи в виде А sin (uit + J j fdtdt) о о « где Н - вычисленная вторая производная от угла поворота фазовраща-теля. Множительное устройство выявляет о-т- клонение между фазами выходного напряже ния фазоврашателя и напряжения фазовращающей цепи. Линейная часть этого датчика осущест вляет оптимальное выделение ощибки из по мех и формирование управляющего сигнала на фазосдвигающую цепь, обеспечивая слежение за фазой фазовращателя. Сигнал на выходе интеграторов равен начальной фазе сигнала с фазовращателя и следовательно на входе интегратора, т. е. на выходе дифференцирующей цепи, пропорционален второй производной от фазы, а значит от угла поворота фазовращателя. Таким образом, датчик углового ускорения с такой блок-схемой обеспечивает двойное дифференцирование угла поворота фазовращателя с одновременной фильтрацией помех. Формула изобретения Датчик углового ускорения, содержащий индукционный фазовраща-тель и фазосдвигающую цепь, подключенные к источнику питания переменного тока, и дифференцирующее устройство, охваченное через элемент сравнения отрицательной обратной связью, состоящей из двух последовательных интегрирующих звеньев, отличаюшийс я тем, что, с целью повышения точности дифференцирования и помехозащищенности, в него дополнительно введено множительное устройство, входы которого подключены к выходам индукционного фазовращателя и фазосдвигающей цепи, а выход - к входу элемента сравнения, при этом второй вход фазосдвигающей цепи подключен к выходу цепи обратной связи дифференцирующего устройства. Источники информации, принятые во внимание при экспертизе; 1. Основы автоматического управления од ред. В. С, Попова, М., 1963, стр.102108. 2.Гитис Э. И. и др. Техническая кибернетика М., 1968, стр. 26-58. 3.Авт.св. № 327506, G 08 С,9/04, 12.05.70 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНЫЙ ДАТЧИК | 1966 |
|
SU223151A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2189047C1 |
| Следящая система | 1980 |
|
SU938251A1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| Следящая система | 1981 |
|
SU962844A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2010 |
|
RU2444018C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2008 |
|
RU2393428C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2006 |
|
RU2301970C1 |
| Способ поддержания резонансных колебаний механической системы и устройство для его осуществления | 1989 |
|
SU1726055A1 |
