(54) СЛЕДЯЩАЯ СИСТЕМА

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий фильтр-демодулятор | 1982 |
|
SU1095358A1 |
| Следящий фильтр-демодулятор | 1980 |
|
SU1020970A1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| ДЕМОДУЛЯТОР ДВУХПОЗИЦИОННЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2018 |
|
RU2699066C1 |
| Устройство дискретной фазовой автоподстройки частоты | 1988 |
|
SU1626380A1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1977 |
|
SU1840880A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2271071C2 |
| Устройство фазирования трактов антенных решеток | 1989 |
|
SU1818598A1 |
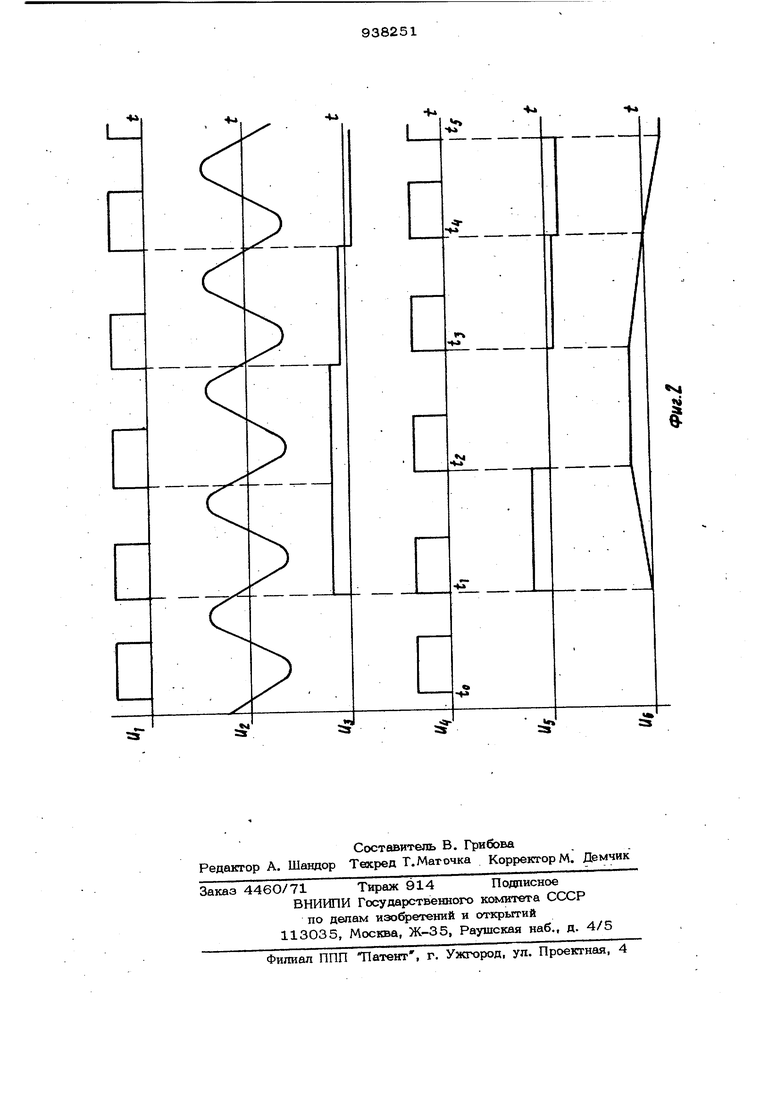
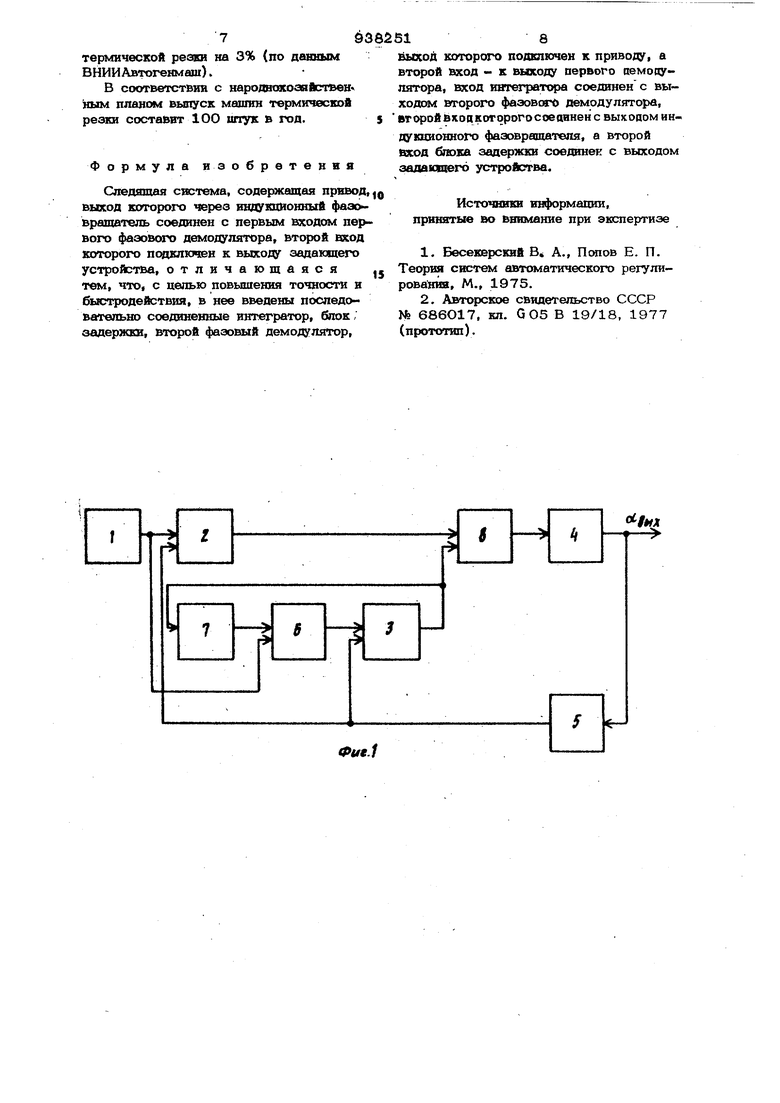
Изобретение относится к aBTOMaTHKt и может быть использовано как электро привод механизмов термической резки металла и станков с программным упра& лением, а также в других позиционных системах.. Известна следящая система, содержащая синусно-косинусные вращакяциеся трансформ аторы, усилители, последовател ное дифференцирующее звено корреигии на RC -элементах, двигатель и редуктор 1 . Однако расщире1ше полосы пропускани системы управления усиливает влияние высокочастотных помех. При болыцом уровне помех в канале регулирования расигарение полосы пропускания ведет к снижению точности работы системы и может сделать ее неработоспособной. Наиболее близкой к предлагаемой является следящая система, содержащая последовательно соединенные задающее устройство, фазовый демодулятор, привод и механически соединенный с ним гашу ционный фазовращатель, выход которого подключен к второму входу фазового демодулятора 2 . Недостатком известного устройства является низкая точность и быстродействие. На выходе фазового демодулятора непрерывный сигнал формируется с помощью экстраполирующей емкости или фильтра, которые предназначены для выделения ПО9ТОЯННОЙ составлякхцей. При STOM появляются высшие гармонические составляющие, их уровень становится небольшим (проценты или доли процента от наибольщего значения постоянной составляющей). В результате сигнал с фазового демодулятора можно представить в виде суммы U(c3)-K W}-vvi(oiJ; где К - 1футизна фазового демодулятора;Cct) - полезная составляющая его выходного сигнала; Y(ci.) - высокочастотные помехи и шумы. При использовании энстрапопирукшего элемента напряжение на нем, кроме того может изменяться скачком в момент Коммутации, Наличие скачкбё и высших гармонических составляющих делает невозможным включение форсирующих (дафференшфующих) корректирующих цепей после фазового демодулятора, так как при дифференцировании efro выходного сигнала помёт подчеркиваются диффере цирующими цепями, полученный сигнал ослабляется неидеальности диффе ренцирующих цеттей, при этом уровень помех в канале регулировании становится недсятустимым. Введение же дополнительных фильтров приводит к ухудшению дибамических свойств следяшей системы. . Цель изобретения - повышение точнос ти и быстродействия при одновременном сохранении высокой помехоустойчивости. Поставленная цель достигается тем, что в следяюшую систему, содержащую привод, выход которого через индукционный фазовращатель соединен с первым входом первого фазового демодуляторе, второй В(ход которого подключен к выхоод , задакщего устройства, введены последовательно соединенные интегратор, блок ; задержки, второй фазовый демодулятор и Сумматор, выход которсхго подключен к приводу, а второй вход - к выходу перво фазового демодулятора, вход интегратора соединен с выходом второго фазового демодулятора, второй вход которого соединен с выходом ин кционного фазовращ теля, а второй 6д бпока задержки соединен с выходом задавшего устройства. На фиг. 1 представлена блок-схема следящей системы; на фиг, 2 - временны диаграммы, поясняющие его работу. Блок-схема следя ей системы содерж задающее устройство 1 (например устрой ство числового программного управления НЗЗ-2М или, например, задающее устро ство на индукционном фазовращателе), фазовые демодуляторы 2 и 3, привод 4 (замкнутая система регулирования скорости вращения двигателя), индукционный фазоврапштель 5 (например, вращающийся трансформатор ВТМ- Г), блок 6 задержки, интегратор 7 , сумматор 8. На фиг. 2 представлены временные диаграммы, гдеи - сигнал на выходе задающего устройства; и 2. - сипшл офатной связи с индакционного фазовра щателя; и. -- напряжение {эассогласования по положению на выходе фазового демодулятора 2; сигнал с выхода блока задержки 6; - сигнал на выходе фазово го демодулятора 3, пропорциональный производной сигнала ошибки по положению; сигнал на выходе интегратора 7; t л моменты начала импулЬ сов на выходе блока задержки 6, Система работает следующим образом. Синусоидальный сигнал О. выхода индукционного фазовращателя 5 поступает на второй вход фазового демодулятора 2, на первый вход которогх с выхода задающего устройства 1 поступает широтно-модулированный сигнал U той же частоты, что и синусоидальный сигнал с фазевращателя 5,.фаза которого определяется синапом задания. На выходе фазового де- модул5Пора 2 вырабатывается сигнал ошибки по положению, который может иэменягь свою величину в момент прихопа импульса с задакщего устройства 1. В исходном состоянии (момент времени tp) фаза импульса U с выхода задакщего устройства 1 совпадает с фазой синусоицального сигнала выхода фазовращателя бис фазой сигнала Ц на выходе управляемого блока 6 задержки. На выходе фазового демодулятора 3, таким образом буцет нулевой сигнал Ug-/ который удерживает нулевой сигнал U/ на выходе интегратора 7. При изменении фазы задающих импульсоч и (моменты времени -t/, , -t, Ъ 4 изменится и фаза илшульсов на выходе управляемого блока 6 задержки, что приведет к появлению ненулевого сигнала U на выходе фазового демодулятора 3. Этот сишал будет интегрироваться интегратором 7 , выходной сигнал (Jg которого изменяться до тех пор, пока управляемый блок 6 задержки под воэдёйствием этого сигнала не сделает нулевым сдвиг фаз между сигналами и (например, момент времени ta). После этого (при неизменной фазе сигнала задания U) на выхо/ю фазового демоцулягора 3 установится нулевой сигнал Of, а на выходе интегратора 7 постоянное напряжение (J пропоргшонапь ное разности фаз сигналов 0/ и U . Таким офазом, интегратор 7 обеспвт чиЬает оптимальное выделение ошибки из помех и формирует управляющий сигнал Ofc на управляемый блок 6 задержки, обеспечивая слежение за фазой фазовр шателя 5. Сигнал U rta выходе шггегра- тора 7 равен разности фаз сигналов с фазовращателя задания Ц т.е. на выходе интегратора 7 сигнал Ur пропорционален первой производной от ошибки и, по положению следящей системы. Сигнал ошибки по положению UJcyмми руется с сигналом U пропорциональнйм первой производной от этой сяшибки на сумматоре 8. Результирующий сигнал управляет приводом 4. Сигналы UT, «1 и проторциональны раз ности фаз сигналов с фазоврашателя U. и задания Ц, т.е. пропорциональны оши ке по положению следящей системы. Считая управляемый блок 6 задержки и фазовый демодулятор 3 безынерционны ми звеньями, можно записать передаточную функцию W(p) введенного корректи рующего контура, состоящего из элементов 6, 7 и 3 следующим образом: и, и, К..Р .«.( u -iv-W где К и Т - коэффициенты, зависящие от настройки контура. Пусть передаточная функция привода 4 имеет вид (настроенный привод с дост точно высокой степенью точности аппроксимируется передаточной функцией второзто порядка): )u.v,Кз - коэффигшент передачи привода (добротность.привода по скорости); Т-1, Тэ - постоянные времени. Тогда передаточная функция разомкнутой системы примет вид fuJLlli-l NJVCP)) ()C1Vrjp Настройка корректирующей цепи долж на быть проведена так, чг.обы вьшолняло соотнощение --т,-к, где Tj. Т Тогда из (4) получим Спт,,Н.т,,, Найдем характеристичесхое уравнение )0. Подстановка выражения (6) н (7) приводит к уравнению VjpHT,4.T).0 Из (8) по условиям устойчивости I-.-i. Т, Ъ Ч. Для системы без коррекции условш устойчивости Отсюда следует, что, изменяй пост6янную времени Т, , при условии выпол,нения соотношения (5), можно получить устойчивость системы при большем значении добротности по сравненщо с н зскорректированной следящей системой, т.е. повысить ее точность и быстродействие. Демпфирование посредством поднятия высоких частот(или соответственно введение упреждения по фазе) позволят; получить требуемый результат прапичео ки при любых передаточных функциях исходной системы. Поднятие высоких частот расширяет полосу пропускания системы, что приводит к увеличению ее быстродействия н динамической точности. Одновременно а повьш1ением точности и быстродействия следящей системы обео печивается высокая помехоустойчивость вследствие того, что для коррекции дифференцируется не сам сигнал ошибки, а параметры сигналов (разность фаз), так как обеспечивается слежение фазы сигнала на выходе управляемого узла задержки 6 за фазой датчика (индукционного фазовращателя) 5. Применение предп 1гаемой следящей системы в маш1гаах термической резки с программным управлением позволяет (за счет повышения точности работы и быстродействия, а также обеспечения высокой помехоустойчивости) снизить процент брака на 2% (по данньпл ВНИИАвтогекмаш) и (за счет возможности повышения скоростей резки при обеспечении заданной точности вырезаемой детали) повысить производительность машины термической резв на 3% (по дашшм ВНИИАвтог«нмаш). В соответствия с народвокоаяйстееи ным планом выпуск машин термической резки составит 100 штук в год. Формула из обретение Следящая система, содержащая привод выход которого через индукционный фаао врашатель соединен с первым входом пер вого фазового демодулятора, второй вход которого подключен к выходу задающего устройства, отличающаяся тем, что, с целью повышения точности и быстродействия, в нее введены последовательно соединенные интегратор, блок, задержки, второй фазо&ый демодулятор, ёьосоД которого подключен к приводу, а второй вскод - к выходу первого пемолулятора, вход интегратора соединенс выходом второгч фазовсяч демодулятора, второйвхоакогорогосоеанненс выходом индукционного фазовращателя, а второй вход бпока задержю соединек с выходом задающего устройства. Источники информашш, пршштые во внимание при экспертизе 1.Бесекерский В А,, Потов Е. П. Теория систем автоматического регулирование, М., 1975. 2.Asrropcisoe свидетельство СССР № 686О17. кл. GO5 В 19/18, 1977 (прототип).
«;i
«%
V4
;:i
:5
