(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсатор квадратурной помехи для следящей системы переменного тока | 1982 |
|
SU1083156A1 |
| Следящая система | 1986 |
|
SU1472871A1 |
| Следящая система | 1983 |
|
SU1120280A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1978 |
|
SU752224A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| Следящая система | 1987 |
|
SU1439529A1 |
| СЛЕДЯЩАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ИНЕРЦИОННОСТИ | 1991 |
|
RU2013796C1 |
| Следящая система | 1982 |
|
SU1109711A1 |
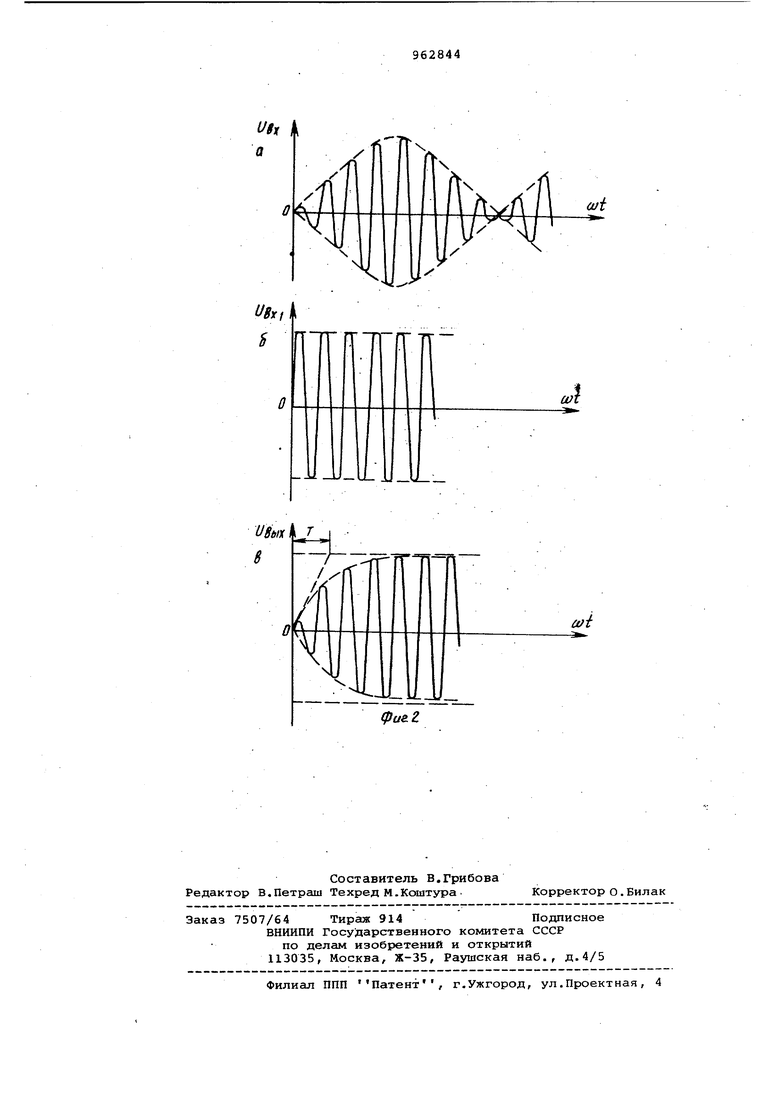
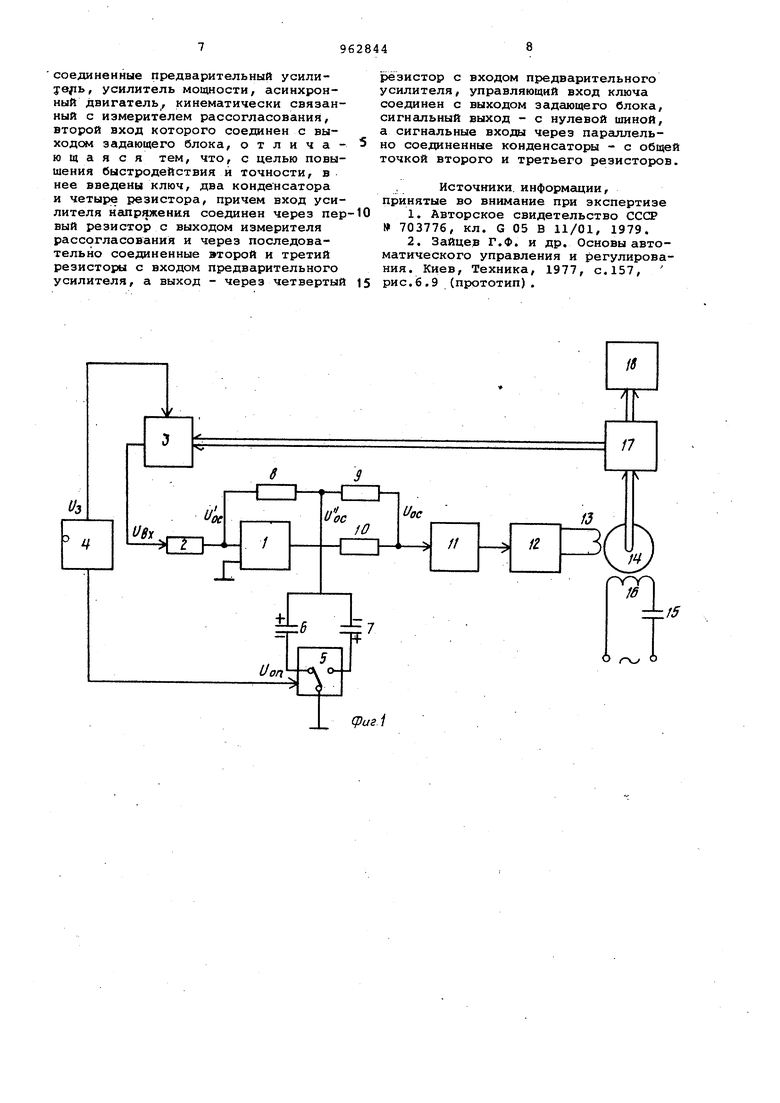
Изобретение относится к следящим системам с асинхронными двухфазными двигателями и может быть использовано в системах автоматического управления различного назначения. Известна следящая система,содержаща блок сравнения,корректирующее устройст во,предназначенное для подавления квад ратурной составляющей сигнала рассогла сования, усилитель напряжения и усилитель мощности, блок корректирующей поло жительной обратной связи,обеспечивающий компенсацию скоростной составляюще ошибки системы, первый масштабирующий блок (делитель напряжения), устанавливающий необходимую глубину жесткой отрицательной обратной связи с выхода тахогенератора, второй масштабирующий блок, устанавливающий величи; ну сигнала положительной обратной связи для компенсации скоростной составляющей ошибки системы, исполнитель ный двигатель, редуктор, тахогенератор, первый блок выделения модуля, предназначенный для выдачи сигнала одной и той же полярности при изменении знака ошибки следящей системы, второй блок выделения, модуля, предназначенный для выдачи сигнала одной и той же полярности при изменении знака скорости отработки, два пороговых устройства и коммутатор 1. Недостатком указанной следящей системы является сложность конструкции, наличие жесткой тахометрической отрицательной обратной связи приводит к увеличению динамической ошибки следящей системы при гармоническом и линейном задании входного сигнала, а применение корректирую,щей положительной обратной связи, представляющей по существу интегрирующее звено в прямом тракте усиления, вносит запаздывание по фазе огибающей амплитудно-модулированного сигнала, что снижает запас устойчивости и ухудшает быстродействие системы .« Наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая измерительное устройство, например, выполненное на индукционных датчиках, работающих в трансформаторном режиме, подключенное к его выходу корректирующее устройство, содержащее последовательно соединенные демодулятор, фильтр,дифференцирующий контур постоянного тока и модулятор, выход которого подключен к входу усилителя мощности, асинкронный двухфазный двигатель, обмотка управления которого подключена к выходу усилителя мощности, а обмотка возбуждения через фазосдвигающий кон денсатор - непосредственно к захшмам источника питания переменного тока, редуктор, обеспечивающий механическую связь между двигателем и 4)трабатывающим датчиком измерительного устройства и нагрузкой 2. Недостатком известной следящей системы является наличие перерегулирования и большая длительность переходного процесса при отработке входных воздействий, обусловленные наличием запаздывания в тракте усилителя вносимого инерционностью фильтров демодулятора и модулятора корректирующего устройства. Кроме того, наличие демодулятора и дифференцирующего контура постоянного тока в трак те усилителя существенно уменьшает отношение полезный сигнал/шум. Указанные недостатки ограничивают, а в некоторых случаях делают невозможным применение известной следящей системы. Цель изобретения --повышение быст родействия и точности, обеспечение отработ:йи рассогласования без перерегулирования и расширение области применения системы. Поставленная цель достигается тем что в систему, содержащую усилитель напряжения и последовательно соединенные предварительный усилитель, усилитель мощности, асинхронный двигатель, кинематически связанный с измерителем рассогласования, второй вход которого соединен с выходом задающего блока, введены ключ, два кон денсатора и четыре резистора, причем вход усилителя.напряжения соединен через первый резистор с выходом изме рителя рассогласования и через после довательно соединенные второй и тре тий резисторы со входом предваритель ного усилителя, а выход - через чет вертый резистор с входом предварительного усилителя, управляющий ,вход ключа соединен с выходом задающего блока, сигнальный выход - с нулевой шиной, а сигнальные входы через параллельно соединенные конденсаторы с общей точкой второго и третьего р зисторов. н4 фиг.1 изображена структурная схема предлагаемой следящей системы на фиг.2 - диаграммы напряжений. Следящая система содержит усилитель 1 напряжения (переменного тока вход которого через первый резистор 2 соединен с выходом измерителя 3 рассогласования, задающий блок 4, ключ 5, управляющий вход которого подключен к задающему блоку 4, конденсаторы 6 и 7, первые выводы кото рых соединены соответственно с первым вторым сигнальными входами (неподвижные контакты ) ключа 5, а вторые выводы подключены к средней точке последовательно соединенных резисторов 8 и 9 отрицательной обратной связи усилителя 1 напряжения, резистор 10, подключенный первым выводом к выходу усилителя 1 напряжения, а вторым к входу предварительного усилителя 11 и к второму выводу резистора 9, усилитель 12 мощности, присоединенный своим входом к выходу предварительного усилителя 11, а выходом к обмотке 13 управления асинхронного (двухфазного) двигателя 14, фазосдвигающий конденсатор 15 в цепи обмотки 16 возбуждения двигателя 14, редуктор 17, обеспечивающий кинематическую связь вала двигателя 14 с нагрузкой 18 и измерителем 3 рассогласования. Следящая система работает следующим образом. Амплитудно-модулированный входной сигнал Uav U,,,sinnt coswt (фиг.2а) с выхода измерителя 3 рассогласования через резистор 2 поступает на вход усилителя 1 напряжения (фиг.1), здесь и sinfJt - гармонический закон изменения огибающей сигнала;57 - угловая частота огибающей сигнала; оинесущая угловая частота. С выхода усилителя 1 напряжения часть усиленного напряжения входного сигнала (UQ,..) , определяемая глубиной отрицательной обратной связи, . через резистор 10 поступает в цепь отрицательной- обратной связи усилителя 1. Далее указанный сигнал разделяется на две части:.первая из них VQ через резисторы 8 и 9 поступает на вход усилителя 1 напряжения, а вторая Ugc через резистор 9 - к общей точке соединения вторых выводов конденсаторов 6 и 7, первые выводы которых подключены соответственно к первому и второму сигнальным входам ключа 5, который управляется опорным напряжением UQJ , -поступающим от задающего блока 4 и совпадающим по фазе с напряжением задания Uj,. е Начальная фаза сигнала (опорного Напряжения) на управляющем входе ключа 5 выбрана так, что первый сигнальный вход подключен к нулевой шине в течение нечетных полупериодов . несущей частоты опорного напряжения, а второй сигнальный вход - в течение четных полупериодов. В результате .сигнал UQ , ответвляющийся в цепь ключа 5, в течение нечетных полупериодов опорного напряжения по цепи выход усилителя 1 напряжения - резистор 10 - резистор 9 цепи отрицательной обратной связи усилителя 1 напряжения прикладывается к второму выводу конденсатора 6, а в течение четных полупериодов по указанной це пи - к второму выводу конденсатора 7. В течение нечетных полупериодов опорного напряжения происходит заря конденсатора 6, а в течение четных конденсатора 7 до амплитудного знач ния огибающей напряжения и, приче полярность заряда конденсаторов неодинакова и в данном случае будет такой, как показано на фиг.1. Поско ку в следующий полупериод несущей частоты напряжение входного сигнала изменит свою полярность, а ключ 5 замкнет цепь через второй сигнальны вход, то полярность напряжения на конденсаторах 6 и 7 не изменится. П размыкании цепи первый (второй) сиг нальный вход - выход ключа 5 разряд конденсаторов 6 и 7 не происходит (пренебрегая утечками). Поэтому напряжение на конденсаторе 6 (7) оста ется равным амплитудному значению UOD огибающей, зарядный ток равен нулю. Следовательно, в установившем ся режиме сигнал и отрицательной обратной связи не ответвляется к общей шине следящей системы через конденсаторы 6 и 7, а практически полностью поступает на вход усипителя 1 напряжения. Вторая часть усиленного усилителем 1 напряжения входного сигнала КUBX (К - коэффициент передачи усилителя 1 напряжения) через резистор 10 поступает на вход предварительного усилителя 11, где происходит дальнейшее усиление сигнала и подавление его квадратурной составл ющей. Окончательное усиление сигнала осуществляется усилителем 12 мощ ности, выход которого подключен к о мотке 13 управления асинхронного дв гателя 14. Обмотка 16 возбуждения двигателя 14 присоединена к сети пе ременного тока последовательно с конденсатором 15, обеспечивающим фа зовый сдвиг 7 90° между токами обмоток управления и возбуждения. Под действием напряжения на выходе усилителя 12 мощности двигатель 14 приходит во вращение и через механи ческий редуктор 17 перемещает нагрузку 18 и вместе с ней измеритель рассогласования,пока не произойдет согласования. При подаче на вход следящей системы скачка напряжения несущей частоты Ug, модулированного прямоуголь ным импульсом частоты Я. (фиг.25), усиленное напряжение сигнала через резистор 9 в течение нечетных полупе риодов опорного напряжения Uon прикладывается к конденсатору 6, а в течение четных - к конденсатору 7, происходит интегрирование напряжения пропорционального входному сигналу. и заряд конденсаторов до амплитудного значения огибающей Upj, . Через некоторое время переходный процесс заканчивается и реакция рассматриваемого корректирующего звена на скачок амплитудно-модулированного сигнала принимает вид, изображенный на .2в. Переходная характеристика корректирующего звена (фиг.2в) с модулированным сигналом эквивалентна для огибающей переходной характеристики апериодического звена первого порядка. Поскольку рассматриваемое звено, имею щее коэффициент усиления (затухания) К и постоянную времени Т, работает в режиме, когда сигнальные входы ключа 5 замыкаются на полупериоды опорного напряжения несущей частоты при начальной фазе несущей частоты относительно моментов коммутации (моментов замыкания сигнальных входов) ключа 5 равной нулю, то оно воздействует на огибающую несущей частоты примерно, так же, как интегрирующее звено постоянного тока, имеющего коэффициент усиления К и постоянную времени Т, на сигнал постоянного тока, совпадающий по форме с огибающей. Операция интегрирования амплитудномодулированного сигнала рассматриваемым корректирующим звеном осущестт. вляется с некоторой погрешностью, которая уменьшается с ростом постоянной времени звена. Таким образом, корректирующее зве)но следящей системы, содержащее два конденсатора и ключ, управляемый опорным напряжением несущей частоты, совпадающим по фазе с входным сигналом следящей системы, представляет собой, по существу, синхронный интегратор. Поскольку синхронный интегратор является интегрирующим звеном в цепи отрицательной обратной связи усилителя напряжения, то обуславливаемое им запаздывание по фазе для огибающей приводит к положительному фазовому сдвигу огибающей амплитудно-модулированного сигнала при прохождении его ерез главный контур регулирования , следящей системы. Таким образом, сочетание синхронного интегратора с усилителем напряжения с резистивной отрицательной обратной связью позволяет исключить из тракта усиления следящей системы сложный дифференцирующий контур и тем самым существенно повысить быстодействие предлагаемой следящей системы, исключить перерегулирование ри отработке входных воздействий, величить отношение сигнал/шум и расирить область ее применения. Формула изобретения Следящая система, содержащая усиитель напряжения и последовательно соединенные предварительный усилиjejib, усилитель мощности, асинхронный двигатель, кинематически связанный с измерителем рассогласования, второй вход которого соединен с выходом задающего блока, отличающаяся тем, что, с целью повышения быстродействия и точности, в нее введены ключ, два конденсатора и четыре резистора, причем вход усилителя напряжения соединен через пер вый резистор с выходом измерителя рассогласования и через последовательно соединенные второй и третий резисторы с входом предварительного усилителя, а выход - через четвертый резистор с входом предварительного усилителя, управляющий вход ключа соединен с выходом задающего блока, сигнальный выход - с нулевой шиной, а сигнальные входы через параллельно соединенные конденсаторы - с общей точкой второго и третьего резисторов. Источники, информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 703776, кл. G 05 В 11/01, 1979. 2.Зайцев Г.Ф. и др. Основы автоматического управления и регулирования. Киев, Техника, 1977, с.157, рис. is ,9 (прототип) .
