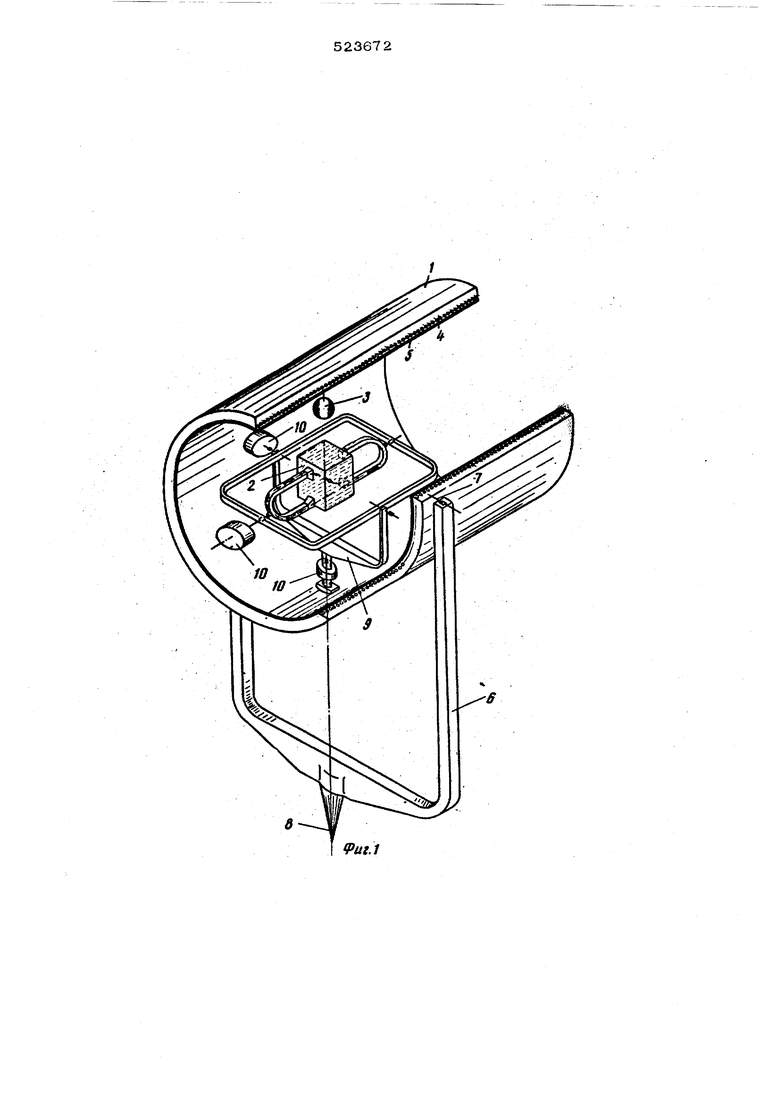
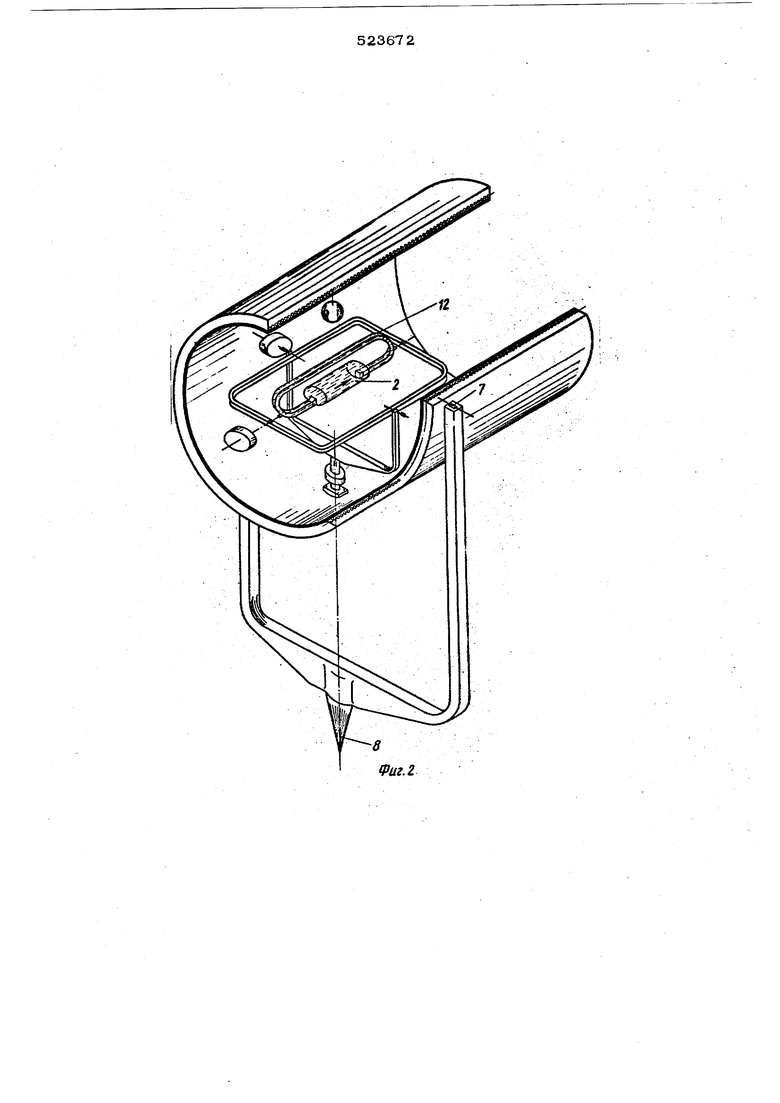
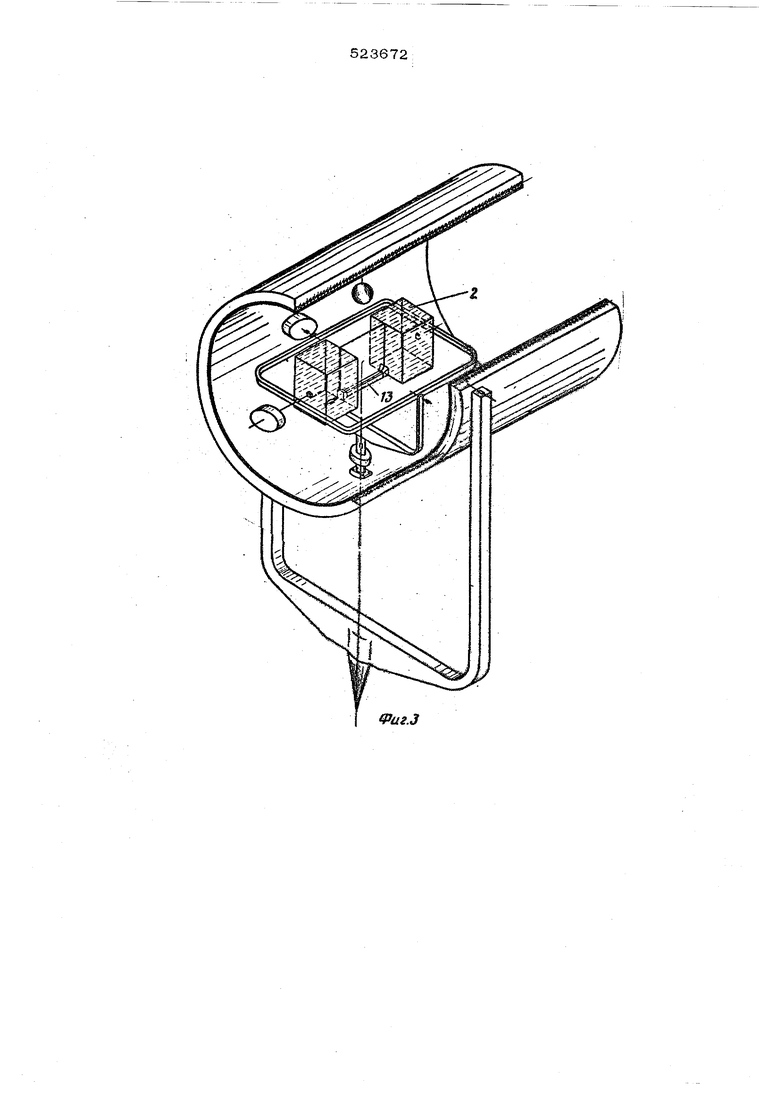
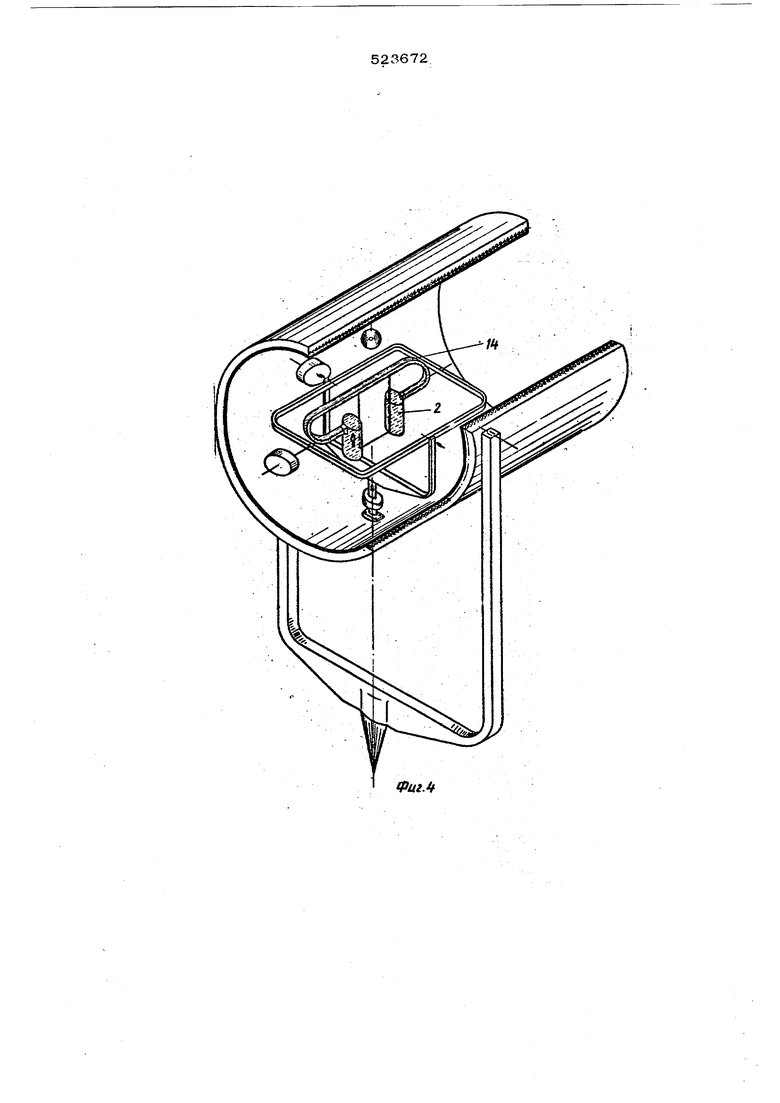
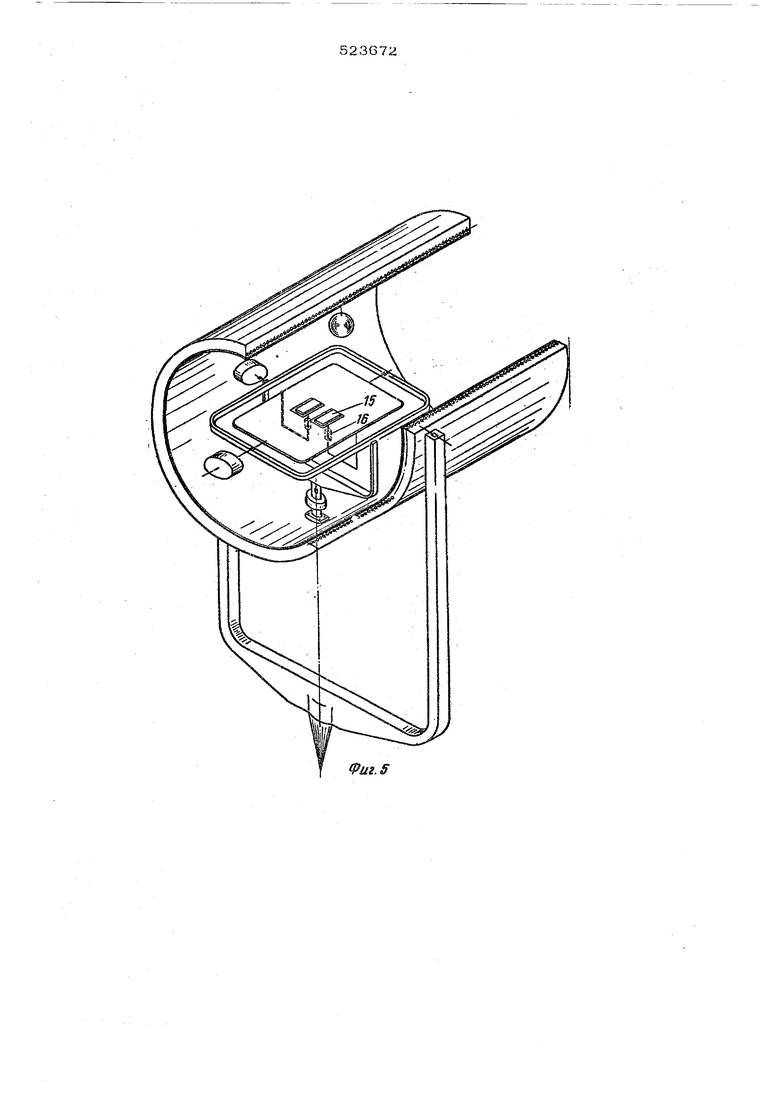
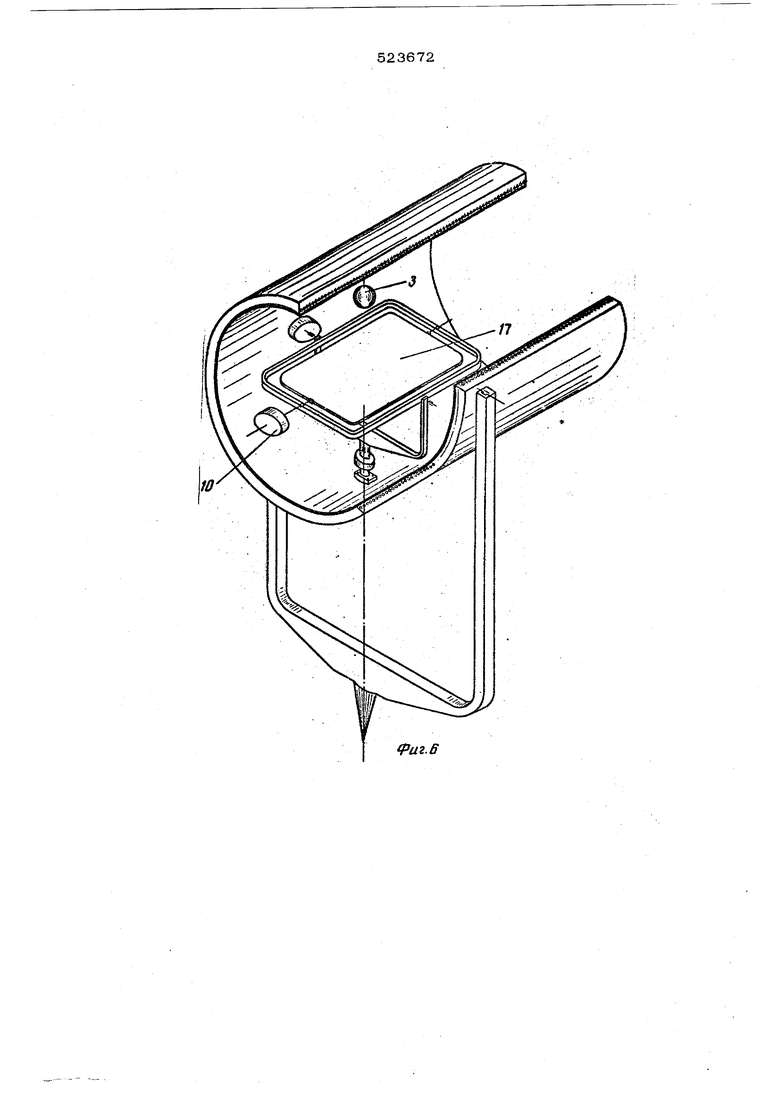
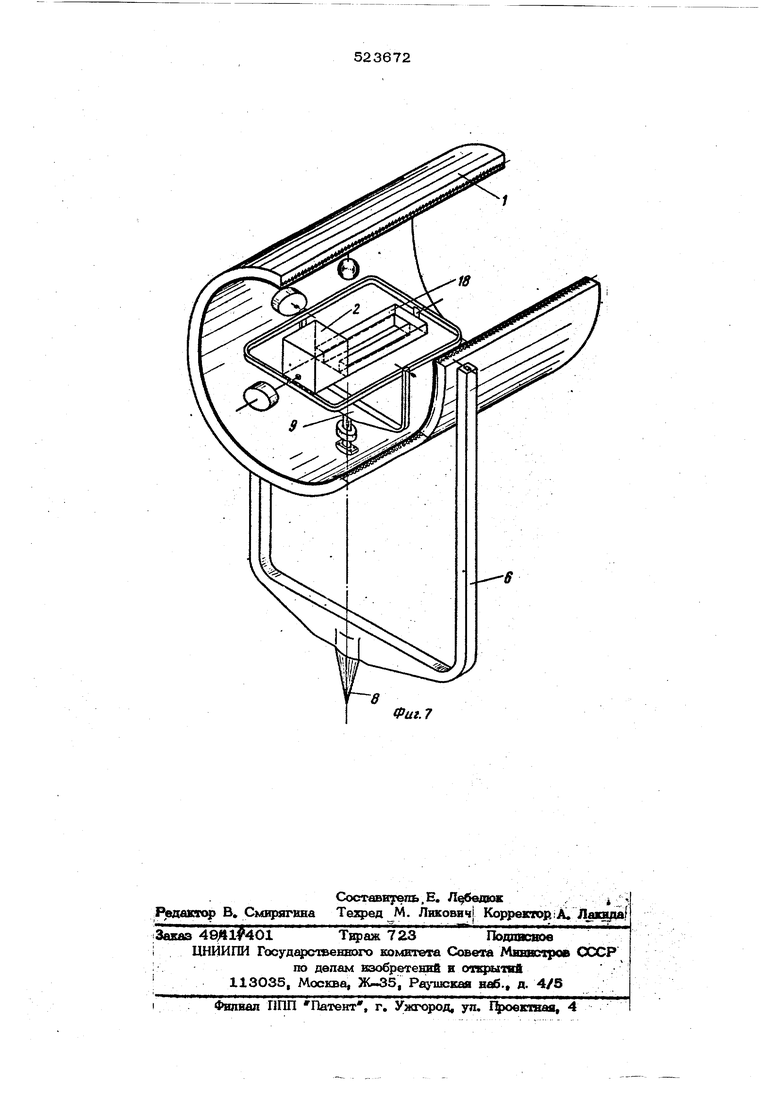
оушкой 4j соеднненлой с источкижом тока (на фигурах не показан:),, и экраном 5, Камера 1 установ|7-ена на конке стойки 6 пос ЬедстБом шарн1-5ра 7. Стойка 6 вьшопнена .с ут1О|юм 8, выпогшенным в виде кпинообра ного шарнира, i В камере 1 располо)кеЕ| карданный iipp вес 9 с npjiBOflaivjH Ю, приз-гом носитель установяен на кардалозс-ы яодвесе „9, I Носитель 2 для рыбы прздставззяет со бой аквариум, иг-дершэй на противопопож- ных сторонах по U I обравк-: му патру6« ку 11, при этом п-Элрг/бкн 1,1 распокожены в одной плоскости. На фиг 2 носгтепъ дна рыбы предста- Епяет собой цялшздричесЕий аквариум ос- нования которого со&д;гн:еНы одним naipy6 ком 125- образующим с с:;:варкумрм едьшую сообша«О1пук ся аэ1.-гкпу -/ : сатстеьгу, На фкг« 3 H&csraSJfi, а рьгоы вьшол«« нен в Виде двух ака;-;«:::, ;:;-дшюзшых прямым патрубком 13, На фет, 4 Hociiie.iib 2 шт рыбы состо иг из двух цилиндриче jKifs aKBfirJjr Moa, со« {патрубком 14, едш1енныХС Образаы;;4 На фиГо S HooHTenjT Я Bb0jC iji:eK в виде ; :i;pvJBf;ifloj,j 16 дла опорной ПЛОШЯПКЕ i ;;гч объекта Б пре смещения яентра делах его устогттшого paEHOESCSiSJ, ; На ф1гг. 6 нсентэ 1S зьчтопкегг в виде плоской плоигадг.; i 7, На фИл, ./ .iicaKALjjib i v:::,;/no jiieii Б виде камеры с замкнутым гчачапом 18Г . ф ;ГГс. явпяюася закреп- . . ленке носителя .-„л оиъекта ксследозаш{я в кардш1овом подвесе; t. что гюзволяет. -орк ентировать объект ксспедоважш во время опыта в neo6jbOMM v,:o:-;; .ггй раБкеник, и зах™ реппение СТОЙХЁ отнооктепьно ппсжкости опоры о поьющыо упора.З, позволяющего приводЕать 3 .епие кяг-леру 1вместе с кардаяовым подвесом lOj в зависимости от поставпе.. вацвч. Экраи S защищает объект йсследоваяия от влиян ш магнитных .электрическкх к эпектромяхннигьгх полей, сущесгвующих ;;-,, за пределами камеры 1. Раапичньге формы вьаюлаеьхав; носитепя 2 объекта исслздовзнкл| (фпг« .4} расш ряют Бозмоиагсстп ;::сспедовашш рыб. Возможности изобреаення: многообразны Оно, например, лсавояяех кзучкгь здйяние KopHoniaEOBa ускорения -Г- маг нитном поле на функиионапъные в .центральной нервной системе человека, Для этого иссле.ауе:могс:1 человека помеш,ают в камеру 1,,, (фш 6J Б ипредепениом попо- женин отпсою:йяькг:1 атшав/геияя вектора ;Псютоянного маг;;;1П-:юго поля а ааписыва. ют его электроэм:1);ефакограмму. Затем упором 8 вращают камеру 1 с человеком с за« данной угловой скоростью, обеспечивая q помощью карданового подвеса 9 со;фанение первоначального положения человека в маг нитЕОМ попе, и вновь записьюают его элекн троэндефалограмму.; О произошедших функциональных сдвигах в центральной нервной системе испытуемого человека судят путем сравнения двух указанных записей биоэлек трических потенциалов его мозга. Если устройство ислользуют для исследования рыбы, то носитель 1 2 заполняют водой. В течение одной-двух недель еже- евно рыбу помещают на 1-2 час в аква-| риум для адаптации в ситуации. За это время рыба может самостоятельно парен двигаться в аквариуме в любом направлении. После адаптации рыбы в аквариуме ее подвергают действшо электрического тока в виде одного илр нескольких импульсов, при этом рыба убегает - оборонительная реакция. С помощью импульсов тока рыбу , приучают находиться в определенном месте,) носителя 2, например внизу (правого) патч| рубка, и в определенном положении относительно аквариума, нахфнмер головой внутрь. Указанное место нахождения рыбы и ее положение в аквариуме - исходное стартовое положение, в котором .рыба на данной стадии обучения уже не подвергается) дэйствшо электрического тока. Затем рыбу приучают переплывать по маршруту, наме-| 4ejiHOMy экспериментатором (показано ктгфной линией на фиг. 1). Перейльшание каждый раз должно заканчиваться возвр -шением рыбы в исходное положение. Зкспв«.у риментатор следит за тем, чтобы выбранюфЙ шл маршрут перепльшакия в каждом сеансе: / опытов с данной рыбой оставался неизмеи- яым. Испытуемая рыба приучается к оп- i ределевно динамическому стереотипу j поведения, связанному с определенной ; ) мой и количеством движения. Для этого в течение 2-3 недель ежедневно на 1-2 час рыбу помещают в аквариум и через каждые мин ее подвергают указанному дей4 ствию электрического тока. . I В течение опытов рыба начинает более j четко выполнять заданную форму движения в аквариуме на каждое предъявление эпектрического тока, в связи с чем экспериментатор постепенно снижает силу тока в им- пульсах до пороговой величины. Не следуеК разрешать испытуемой рыбе перепльтание I без предъявления тока. После появления у рыбы правильной и четкой поведенческой реакции на каждое предъявление тока пороговой величины решают одиз из.указашсых вьпие задач иссле-ji дования, например устанавливают возмож ное восприятие рыбами внешнего злш;тромаг китаого попя. При этом рыба в проиессе движения всей установки будет пересекать магнитные и эпектромагнитзаш силовые ли- НИИ, как естествеглюго происхождения, так |и нарочно созданнь © от исгочкиков магнит |ных и эпектромагний&ш попей вмонтиро- I ванных Б камеру 1. форкйа и харак- тера указанных попей fe каждом отдельном спучвв будет зависеть от той программы j вжжпедований, догорая замечена ранееТ/ Одну к ту же рыбу «яейуег брать для выпопнекия только одной задачи. Для этого прийеняется известный способ вьгработки услов ных р€4шексов, Периэд оставления выб5фа JOT от 5 до 30 сек. Включают нсточннк электромагнитного попа например, антенну 3 и tepea период остй&лешш (огфедепенное вреЙя, нал15 имер, 5 сек). допош-Ш еаьно I подают в аквариум импуньсы тока, пршем {выбранный период отсчаванш гфи работе с ||дадаой.рыбо§ дшьдеА ем не изменйют. i: При со©шзд©ша укжза агых правип после ||2;0 30 13 й еоч@1-аний ад з@к1ррмагнигаого поля в ш щ-пъс тока рыба начинает перепльшать поел© .ййявпения внутри камеры i эяекиромагЕИТйОГо пояя без гфеи ьквиштя iBMHynbCOE , Ф о р 14 у а ;й и S ©: 6 р е т е н и и 1. Устройство дяй:изучения : магнйтныХ) электрических и &а.&к.троыагнаткых свойств ждвых oprsi.,, состоящее из камеры, ;представпя ШМ«1. маг нйкШЕя:, |®йешрйч ёе«йс й- вге®К1рромагнйтных попей, и psBMeuiemioroiB ней носигедя ксспедуеl.Moro живого объекта, отпичающеie с я тем, что, с цепью получения досто верных резупьтатов щж проёедеетш опытов, , оно С11абжено шаршфно связанной с (камерой стойкой cjynopOM для фиксадии ее и распо- поженным в камере кардановым подвесом дда закреп,;иния на нем носителя. 2. Устройство по п, 1, о т л я ч а ю «iщ е е с я 1тем, Что нрситепь объекта представляет собой аквариум, имеющий на про- Т1 зопололшых сторонах по| U -образному патрубку, при этом {такие патрубки располо Жёны в одной плоскости. 3.Устройство по п. 1, о тп и ч а ю 4-. 1Ц е е с я i тем, что носител} объекта пред--1 стпвляет собой аквариум, имеющий форму диииндра,основа 5ия которого соешшены ofHним патрубком, образующим с акварщ/моы еди11ую сообш.аю1п 1ося аамкнутую систему, 4.Устройство по п. Is О Т л ич а ro.iщ е е с я тем, что носитепь объекта состоит на .овух параллепыю распопожерлых аквариумов соединенных паэрубком. 5.Устройство по п. 1, о т л и ч а 10 tjm е е с я тем, чт-о носитель объекта pbinoliiн©н в виде плоладки с аривода.ми дл i сме щезшя центра тяжести объекта в пределах его устойчивого равновее взз, например гид- авгашгескими |цйНиндрами, 6.Устройство по ,п. 1, о т п и-ч а ю « е е с я тем, ч-уо носитель объекта вы- Ьолнен в виде, камеры с замкнутым каналом. j 7. Устройство по п, 1, о т а и ч а ю « ;щ е е с я TSMj что носитедь объекта вь.- (полней в виде ппЬтадет.
д
Риг.1
иг.З
Фиг.
Фиг.5
Риг.Б
Фиг. 7


| название | год | авторы | номер документа |
|---|---|---|---|
| Компас | 1973 |
|
SU468087A1 |
| Устройство для исследования зрения рыб | 1986 |
|
SU1387936A1 |
| Устройство для подвода энергоносителей к фурме | 1979 |
|
SU1051129A1 |
| Сканирующее устройство астро-СпЕКТРОфОТОМЕТРА | 1979 |
|
SU802812A1 |
| Способ определения выживаемости рыб | 1984 |
|
SU1165332A1 |
| Способ стимуляции созревания оцитов у самок байкальских бычков-подкаменщиков | 1989 |
|
SU1706495A1 |
| Устройство для автоматизированной оценки порогов чувствительности сенсорных систем человека | 1988 |
|
SU1648345A1 |
| Устройство для считывания графической информации | 1984 |
|
SU1241178A1 |
| Оптическое устройство наблюдения со стабилизацией изображения | 1989 |
|
SU1691813A1 |
| Способ лечения паразитарных болезней рыб | 2023 |
|
RU2819872C1 |