угловые положения оптической системы, соответствующие углам наклона линии графика и являющиеся характеристикой активности зарегистрированного графиком процесса. Кодовые команды управляют сервосистемой, обеспечивающей перемещение подвижной платформы по абсциссе, скорость которой может
изменяться от - жмакс до -f УЖ макс. ОдНОвременно кодовые комбинации углового положения фоточувствительного узла выводятся на ЭЦВМ в качестве меры активности зарегистрированного процесса.
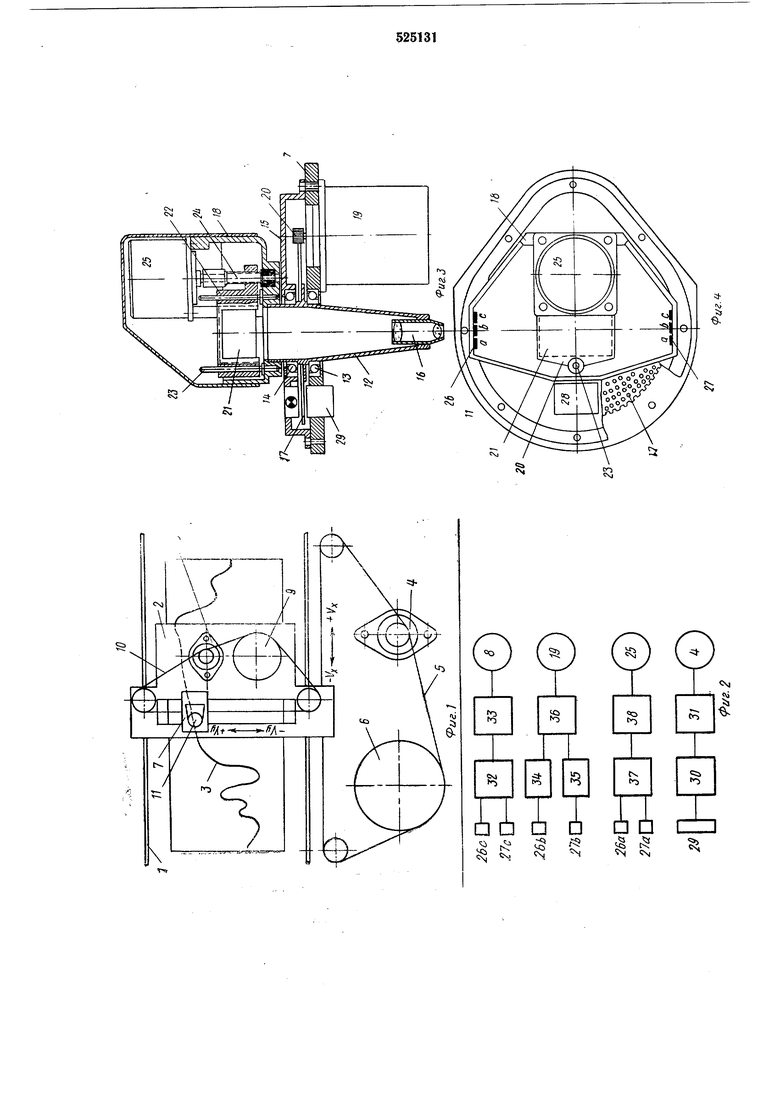
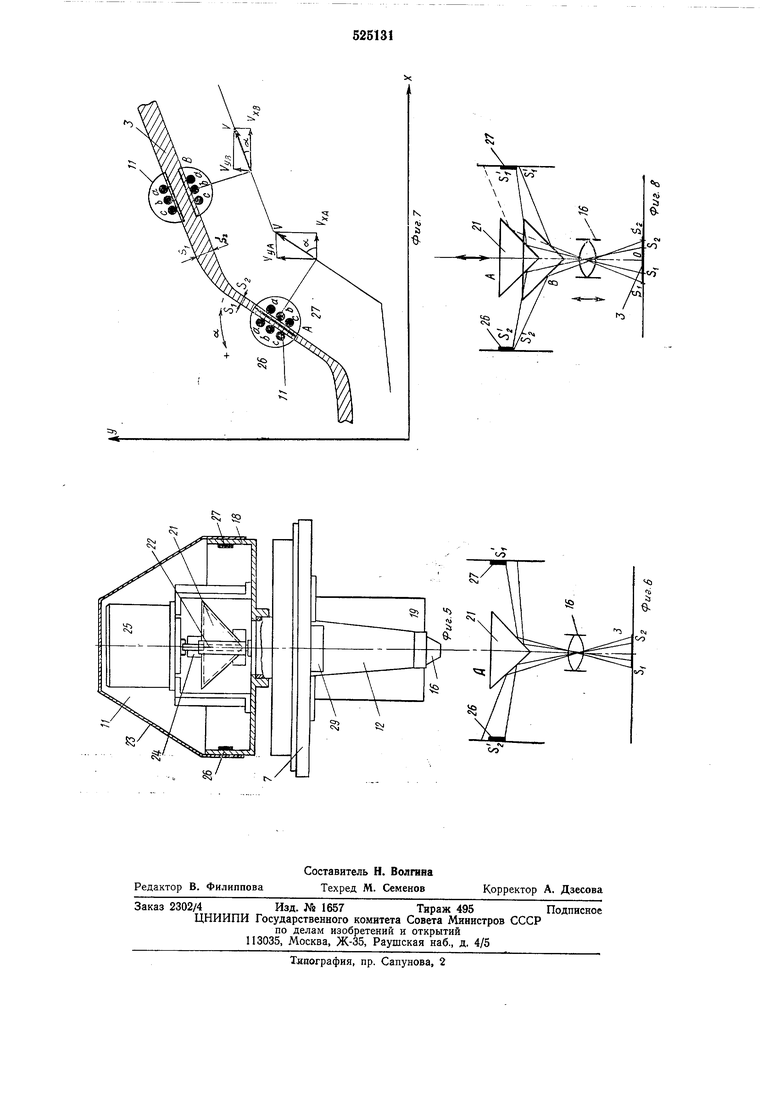
На фиг. 1 приведена кинематическая схема предлагаемого устройства для считывания графической информации; на фиг. 2-блоксхема управления устройством; на фиг. 3- общий вид конструктивных особенностей следящей фоточувствительной головки, вид сбоку, разрез; на фиг. 4-общий вид конструктивных особенностей, вид сверху; на фиг. 5- следящая головка, вид спереди; на фиг. 6- оптическая схема системы адаптации (ход лучей при смещении головки относительно линии); на фиг. 7-схема действия; на фиг. 8- схема хода лучей при действии системы адаптации.
Считывающее устройство состоит из направляющих 1, на которых установлена платформа 2, способная двигаться по всей длине направляющих. Под платформой вдоль направляющих 1 расположен считываемый график 3. Платформа 2 механически связана с электродвигателем 4 через стальную гибкую ленту 5 и кодирующим диском 6. На платформе 2 находится каретка 7, установленная с возможностью перемещения по направлению, перпендикулярному направляющим 1. Каретка 7 связана механически с электродвигателем 8 и кодирующим диском 9 через стальную гибкую ленту 10. На каретке 7 смонтирована поворотная оптическая фоточувствительная головка И, которая состоит из поворотной трубы 12, способной поворачиваться вокруг своей оси на 360°. Труба 12 закреплена в упорных щарикоподшипниках 13 и 14, один из которых установлен в теле каретки 7, а второй -в крышке 15. На поворотной трубе 12 смонтированы микропроекционная оптическая система 16, зубчатое колесо 17 с кодовыми пробивками и корпус 18 системы адаптации. С помощью электродвигателя 19, на оси которого закреплено зубчатое колесо 20, входящее в зацепление с колесом 17, поворотная труба 12 совместно со смонтированными на ней узлами может поворачиваться на 360°.
В корпусе системы адаптации установлены зеркальная призма 21, закрепленная в оправе 22, способной перемещаться по направляющим 23, микрометрический винт 24, установленный на оси двигателя 25, с помощью которого перемещается оправа зеркальной призмы 22 по направляющим 23.
На боковых стенках корпуса 18 расположены фоточувствительные элементы 26 и 27, на
которые проецируется изображение участка линии графика с помощью микропроекционной системы 16 и зеркальной призмы 21.
На каретке 7 и в крышке 15 смонтирована 5 система, читающая кодовые комбинации, пробитые на зубчатом колесе 17. Система состоит из осветителя 28 и фотодиодной линейки 29. Устройство имеет четыре электродвигателя. Двигатели выполняют свои ограниченные
10 функции, совместно обеспечивая движение фотоголовки строго по линии графика. Каждый двигатель получает управляющие сигналы от своей группы фотоэлементов, которые преобразуются в электронных узлах сервосистем, в соответствии с индивидуальной функцией.
На фиг. 2 показано, что сервосистема, управляющая движением по абсциссе, состоит из фотодиодной линейки 29, читающей код углового положения поворотной трубы 12, блока 30 дещифровкн кода, блока 31 управления движением и двигателя 4. Сервосистема, управляющая движением фотоголовки по ординате, состоит из фотоэлементов 26с и 27с,
5 блока 32 преобразования сигналов, усилителя 33 и двигателя 8. Сервосистема, управляющая угловым перемещением фотоголовки на угол, состоит из фотоэлементов 26в и 27Б, усилителей 34 и 35, блока 36 управления двигателем
0 и двигателя 19. Сервосистема, управляющая перемещением зеркальной призмы при адаптации по щирине линии, состоит из фотоэлементов 26а и 27а, блока 37 сравнения сигналов, блока 38 управления двигателем и двига5 теля 25.
Работает устройство следующим образом. По направляющим 1 платформу устанавливают над линией графика в положение желаемого начала считывания. Поворотную оптическую головку 11 устанавливают так, чтобы направление осевой линии фотоэлементов совпадало с направлением касательной в данной точке считываемой линии. Включают электрическое питание всех схем. В зависимости от
5 углового положения поворотной головки и, следовательно, кодовой комбинации, установившейся на фотодиодной линейке 29, блоки 30 и 31 включают двигатель 4, и платформа 2 начинает перемещаться по направляющим
0 со скоростью Fxa, соответствующей данному угловому положению «а.
Как только начинается перемещение фотоголовки по направлению X (фиг. 7), фотоэлементы 26а, 26в и 26с входят в зону затемнения, вызванного уменьшением количества света, отраженного от линии, по сравнению со светом, отраженным от фона.
Фотоэлемент 26в подает сигнал на блок 34 и вызывает вращение двигателя 19, поворачивающее фотоголовку в направлении +а. Одновременно фотоэлемент 26с аналогично через блоки 32 и 33 вызывает вращение двигателя 8, который перемещает платформу 2 в направлении +Y. Поворот и движение в наG правлении продолжаются до тех пор, пока фотоэлементы 26в и 26с не выйдут из зоны затемнения. Сервосистема X непрерывно вводит -в зону затемнения фотоэлементы 26в и 26с. Сервосистемы, управляющие углом поворота « и движением в направлении Y, непрерывно стремятся вывести фотоголовку из зоны затемнения.
Таким образом, устанавливается непрерывное движение, подобное скольжению по кромке считываемой линии, с полной скоростью У, равной векторной сумме Vx+Vy, а направление вектора полной скорости совпадает с направлением касательной в данной точке линии и определяется углом а.
Аналогично работают фотоэлементы 27в и 27с в случае отрицательного наклона считываемой линии. Сервосистемы а и У работают также, но в обратном направлении.
В случае прохождения участка поворота считываемой линии фотоэлементы 26в или 27в в зависимости от угла наклона линии и его знака будут вызывать поворот фотоголов-ки таким образом, чтобы направление движения совпадало с касательной в данной точке линии. При этом соответственно изменяется скорость Vx, а сервосистема, определяющая движение по У, удерживает фотоголовку над линией попеременного вывода из затемнения фотоэлементов 26с и 27с..
В случае, когда считываемая линия расположена параллельно оси абсцисс, угол , а скорость У.т Ктмакс V. При этом скорость . Когда считываемая линия параллельна оси ординат, угол а составляет 90°. Скорость Vy Уг/макс V, а . Когда угол а превышает 90°, по командам кодовых комбинаций угла положения скорость V приобретает отрицательное значение и платформа 2 движется в обратном направлении. Действия сервосистем а и У аналогичны описанным.
При изменении ширины линии вступает в действие сервосистема адаптации. Эта сервосистема построена несколько иначе по сравнению с описанными. Фотоэлементы 26а и 27а составляют пару, включенную в схему, реагирующую на изменение освещенности при равенстве освещенностей обоих фотоэлементов пары. ПрИ изменении освещенности одного из элементов пары схема не реагирует. В случае одновременного одинакового затемнения фотоэлементов сервосистема с помощью двигателя 25 раздвигает группы фотоэлементов 26 и 27 (как схематично показано в положении фотоголовки на фиг. 8). При одинаковом увеличении освещенности сервосистема сдвигает фотоэлементы. Таким образом, обеспечивается «касание фотоэлементов группы 26 и группы 27 к кромке считываелюй линяй независимо от ее ширины.
Реально система адаптации построена следующим образом.
Группы фотоэлементов 26 и 27 неподвижно закреплены на боковых стенках корпуса 18.
Адаптация осуществлена путем управляемого перемещения оптически расщепленного изображения участка считываемой линии.
Призма 21, боковые грани которой покрыты зеркальным слоем металла и составляют угол между собой равный 90°, расположена так, что ребро зеркальных граней направлено в сторону микропроекционной системы 16 и установлено перпендикулярно ее оптической оси
(фиг. 6 и 8). Изображение участка линии, ширина которой отмечена Si и 2, проецируется микропроекционной системой 16 на зеркальные грани призмы 21, находящейся в положении А. Поскольку ребро призмы пересекает оптическую ось, половина изображения считываемой линии OSj, отражаясь от грани проецируемой на правую боковую стенку и изображение точки Si, попадает в точку Sl. Аналогично проецируется точка S2 на левую
стенку в точку S.
Фотоэлементы 26 и 27 расположены так, чтобы изображение левой и правой кромок считываемой линии касались краев фотоэлементов, а проекционная система устанавливается так, чтобы эти точки были сфокусированы в плоскости фотоэлементов. При увеличении ширины линии, например, до размеров SiSa изображения точек Sl и Sz, отражаясь от зеркальных граней, уходят за пределы поля изображения, занимаемого фотоэлементами. Проходя через фотоэлементы, изображение затемненного участка вызывает сигналы фотоэлементов, которые поступают на сервосистему. Сервосистема перемещает призму до
тех пор, пока точки изображения Sl и S2 не попадут на края фотоэлементов, и сигналы управления прекратятся, а призма 21 установится в положение В. Вследствие изменения длины оптического
хода лучей возникает расфокусировка изображения точек Sl и S2. Для устранения этого явления, одновременно с перемещением призмы 21 перемещается сопряженная механически с призмой микропроекционная система 16.
На фиг. 6 показан ход лучей в оптической системе при боковом сдвиге головки. Когда оптическая головка находится точно над серединой линии, а система адаптации установила призму в нормальное рабочее положение, изображения кромок линии касаются краев фотоэлементов. При боковом сдвиге головки относительно линии одна из кромок своим изображением начинает затемнять соответствующий фотоэлемент. Одновременно изображение противоположной кромки удаляется от края своего фотоэлемента. Фотоэлемент, освещенность которого изменилась, вызывает срабатывание соответствующей сервосистемы, восстанавливающей центральное положение фотоголовки относительно середины считываемой линии.
Таким образом, при описанном взаимодействии всех сервосистем фотоголовка совершает движение с постоянной линейной скоростью
по траектории, совпадающей со считываемой линией.
Стальные ленты 5 и 10 приводов сервосистем ХЕ У совершают линейные перемещения, соответствующие перемещениям фотоголовки по оси X И Y. Кодирующие диски 6 и 9 связаны с лентами приводов, которые передают движение дискам без скольжения.
Кодовые комбинации, изображенные на дисках 6 и 9 и зубчатом колесе 17, считываются фотоэлементами и далее выводятся на внешние устройства ЭЦВМ (перфоратор, магнитная, запись и т. д.). На кодирующее устройство одновременно выводятся три кодовые комбинации, соответствующие абсциссе X, ординате Y и углу положения фотоголовки.
Таким образом, осуществляется преобразование графической информации в цифровую форму, удобную для ввода в ЭЦВМ. Кодовые комбинации X и Y позволяют описать в цифровом виде функцию, представленную на графике, а код, соответствующий углу поворота фотоголовки, дает производную этой функции, т. е. скорость изменения процесса, описываемого графиком.
Формула изобретения
Устройство для считывания графической информации, содержащее оптически связанные микронроекционную систему и фотоэлементы, механически связанные с координатными сервосистемами, отличающееся тем, что, с целью повышения точности считывания, оно содержит зеркальную призму, оптически связанную с фотоэлементами и микропроекционной системой, электродвигатель, на валу которого установлен микрометрический винт, связанный с зеркальной призмой, связанной с фотоэлементами, и кодирующий
диск, жестко соединенный с фотоэлементами и электрически связанный с одной из координатных сервосистем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный прибор привязки к обратным отвесам | 2019 |
|
RU2730370C1 |
| Фотоэлектрический преобразователь положения в код | 1981 |
|
SU1040503A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИНДИКАТОР ГОРИЗОНТА | 1967 |
|
SU199439A1 |
| СПОСОБ И СИСТЕМА ГОЛОГРАФИЧЕСКОЙ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВОЙ ИНФОРМАЦИИ | 2000 |
|
RU2160471C1 |
| СОВМЕЩЕНИЕ И СИНХРОНИЗАЦИЯ НАБОРОВ ДАННЫХ НА НОСИТЕЛЕ ЗАПИСИ | 2000 |
|
RU2234751C2 |
| СИСТЕМА ЗАПИСИ СЕРВОДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАКОПИТЕЛЯХ НА ДИСКАХ | 1995 |
|
RU2141691C1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |
| Нивелир | 1983 |
|
SU1101675A1 |
| Фотоэлектрическая следящая система, например, для копирования по чертежу | 1957 |
|
SU120351A1 |
| Способ считывания контурной графи-чЕСКОй иНфОРМАции C эКРАНА элЕКТРОННО-лучЕВОй ТРубКи СВЕТОВыМ пЕРОМ | 1979 |
|
SU813483A1 |
чg;
