Изобретение относится к вычислительной технике и может быть применено для контроля радиоэлектронной аппаратуры в процессе производства и эксплуатации.
Известны системы автоматическго кон- g троля, содержащие блок регистрации, два элемента И, блок сравнения, первый выход которого соединен с первым входом первого элемента И, второй выход - с первым входом второго элемента И, выход которого ключен к первому входу блока регистрации, блок суммирования, выход которого соединен с первым входом блока сравнения, блоки преобразования, подключенные каждый своим выходом к одному из входов блока сумми- J5 рования и входов - к соответствующему и формационному входу снстемыг датчик случайн ных чисел, первый выход которого соединен с вторым входом первого элемента И, второй выход - с вторым входом второго элемента ,о И, блок управления, выход которого соединен с входом датчика случайных чисел и вторым входом блока регистрации.
В известных системах контроль состояния объекта осуществляется путем измерения 25
его параметров и при получении хотя бы одного результата Не годен объект считают неисправным. В этих системах назначение допусков на каждый параметр кроме своей трудоемкости приводит к еще больщим ошибкам классификации и кроме того не производится учет перекрытия распределений значений параметров для исправных и неисправных объектов, когда безошибочная классификация невозможна.
Помимо этого для контроля сложных технических систем и выявления факта их отказа необходимо производить измерение, преобразование и обработку большого числа параметров, что нередко связано с отключением системы и её простаиванием.
Цель изобретения - увеличение быстродействия и повышение достоверности работы системы.
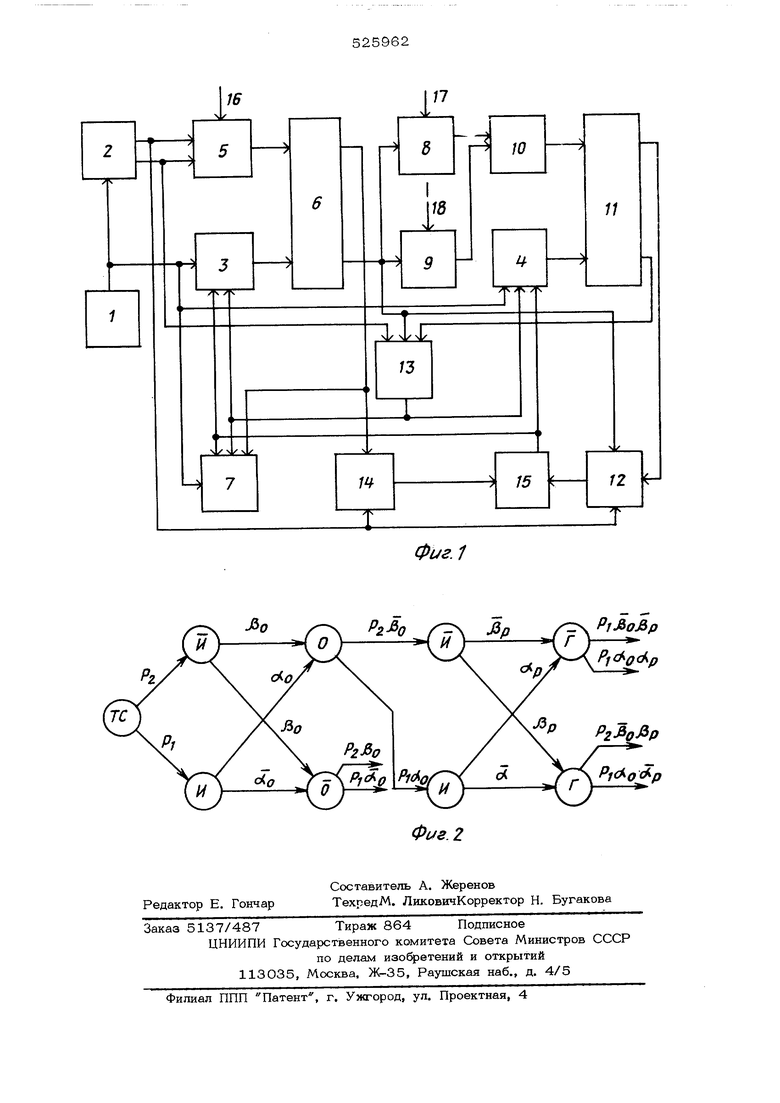
Достигается это тем, что в систему введены дополнительный блок преобразования, два блока формирования пороговых значений, второй блок сравнения, третий элемент И и элемент ИЛИ, подключенный своими вхо к выходам первого и третьего элементов И, выходом - к первым входам блоков формирования пороговых значений и к третьему входу блока репютрации, подсоединенного четвертым входом к первому выходу второго блока срав нения и первому входу третьего элементам, Второй выход блока сравнения соединен с вх дами блоков преобразования и с третьими входами первого и второго элементов И. Первый вход второго блока сравнения подклю чен к выходу дополнительного блока преобразования, входы которого соединены с соответствующими выходами датчика случайных чисел и входом системы, вторые входы блоков сравнения подключены к выходам соответствующих блоков формирования пороговых значений, вторые входы которых сое- динет1ы с выходом блока управления, третьи входы с выходом второго элемента И, вто рой вход третьего элемента И соединен с первым выходом датчика случайных чисел. На фиг. 1 - блок-схема системы; на фиг, 2 изображен граф процесса получения вероятностей. Блок-схема содержит блок 1 управления, датчик 2 случайных чисел, блоки 3,4 форми рования пороговых значений, блок 5 преобразования, блок 6 сравнения, блок 7 регистрации, блоки 8,9 преобразования, блок 10 суммирования, блок 11 сравнения, элементы И 12, 13, 14, элементы ИЛИ 15, входы 16,17,18 системы. Система автоматического контроля (САК работает в трех режимах: контроля, оценки ошибок контроля, обучения. Б режиме контроля состояния объекта бло 1 управления отключает датчик 2 случайных чисел. На первом этапе проверки функционирования объекта по какому-то обобщенному параметру X вводится его измеренное значение в блок 5 преобразования . В этом блоке производится преобразован по формулеj /V (ы Л(х)-ЛпШЙ-, f(х|й) где (t|M)-f x-Hj- плотности вероятностей распределения значений параметра х при условии, что объект был соответственно исправен (и) и неисправен (и). В блоке 6 происходит сравнение величины Л(х) с порогом, сформированным в блоке 3. В случае, когда Л (л) больше значения порога, т.е. в объ те отказ не обнаружен, сигнал с первого Bbixc d блока 6 сравнения поступает в блок 7 регистрации и фиксируется, что объект p ботоспособен. В противном случае, объект признается отказавшим и в дальнейщем про изводится более достоверенная оценка его состояния путем исследования дополнительного набора признаковую . Значения измеренных признаков поступат в блоки 8,9 преобразования, в которых о аналогии с блоком 5 формируются вели w K-ifв дальнейшем суммируемые в сумматоре 10. В блоке сравнения полученная величина сравнивается с порогом, вырабатываемым блоком 4. В случае, когда суммарная величина больше порогового значения, сигнал о годности объекта поступает на первый вход элемента И 12, в другом случае на первый вход второго элемента И 13, Так как со второго входа блока 6 на третьи входы элементов И 12,13 постулают потенциалы, то с приходом сигнала на вход одного из элементов И 12 или И 13 имеющийся сигнал передается с элемента И 13 непосредственно, а с элемента И 12 через элемент ИЛИ 15 в блок 7 регистрации . При этом, в первом случае фиксируется результат Объект негоден, во втором Объект годен. При оценке ошибок контроля блок 1 управления включает датчик 2 случайных чисел, в котором в соответствии с вероятностями Р) Р (И) и Pg Р (И) моделируются исправное и неисправное состояние объекта. В соответствии с порогом, вырабатываемым в блоке 3, и реализацией случайной велкчинь; Л (X), значение которой больше порога, с выхода блока 6 поступает сигнал на первый вход элемента И 14. Если исходным было неисправное состояние объекта, то с первого выхода датчика 2 поступает сигнал на второй вход элемента И 14 и через элемент ИЛИ 15 сигнал, соответствующий необнаруживаемому отказу и обусловленный статистическими свойствами параметра х и ошибками oбнapyж iтeля, передается в блок 7 регистрации. В случае фиксации обнаружителем момента отказа сигнал, проходя через блоки 8-11, передается на вхоа элемента И 13, на выходе которого появляется импульс, соответствующий трем событиям, когда в исправном объекте обнаружителем зафиксирован отказ, однако, из-за ощибок контроля распознаватель отнес объект к негодным. На выходе элемента И 12 появляется импульс, соответствущий событиям, когда в неисправном объекте обнаружителем обнаружен отказ, а распознавателем объект классифицирован, как годный. Импульсы с элементов И 12,13,14 передаются в блок 7 регив котором при больщом числе исс рациипытаний формируются вероятности ложного отказаР. - Р 6 cLp и суммарного, обусловленного обнаружителем и распознавателем еобнаруживаемого отказа р р Q +Р $ Вр Процесс получения вероятностей Рдм Рц легко проследить по графу, прлведенному н фиг. 2, гдеР, и РЗ, 1 Pi - anpiioDi-Jbie вер ятности , равные Р, Р (И), Р - Р (И); dLg,(JL ошибки контроля первого рода, вызванные о наружителем и оаспознавателем. ошибки контроля второго рода, обусловленны обнаружителем и распознавателем; О и О фиксация наличия и отсутствия отказа обнаружителемp -J3p. В режиме обучения САК в связи с двухэтапной работой, предусматривающей включение распознавателя по сигналу с обнаружителя, происходит уменьшение Рд и увеличение Р., . При оптимизации суммарной величиныР tP, rAEO-j--j, уменьшение второго слагаемого быть достигнуто за счет оптимального выбора по роговХд - и При этом изменение значений XQ ,/Q производится за п испытаний путем уточнения результатов (п- 1) испытаний XQ (п- 1),Уо{п-1) за счет Х(-,(п), Л (п) известными методад- и, например, методом стахастической аппроксимации, осуществляемым блоками 3,4 формирования пороговых значений. Знак приращений удх(п) (п) определяется наличием сигнала на одном из выходов элементов И 13 либо ИЛИ 15. Передача знака плюс или минус осуществляется с выходов этих элементов на входы блсКов 3 и 4. Когда вид функций ();(/й)(1и);(/й) позволяет проводить оптимизацию аналитическими методами задача значительно упрощается, например, при релеевских законах. Рассмотренная система может быть использована не только при построении двух этапных лроцеаур контроля, но и в других облас тях, где перец принятием решения по сигналу об наружителя включается распознаватель. и 3 о о Р е т е н и я Система автоматического контроля, содержащая блек ропгсти., цра элемента PJ, блок сравнения, первый которого соединен с первы.Х Бхс:дом перпЛо элемента 11, второй выход - с первмм BXL-aovi ргорого элемента И, которого поцключв) к первому входу регистроюпг, блок суммирования, вы.од KJTuroro соединен с первым входом блока сравпепля; блоки преобразования, поакгпоченные каждый своим выходом к одному из входов блока суммиро ания и входом - к соответствующему пнфоркационному входу системы, аатчпк случайных чисел, первый выход которого соединер. с вторым входом первого элемента li, второй выходс вторым входом второго элемента 11, блок управления, выход которого соединен с входом датчика случайных чисел и вторым входом блока регистрации,о т л и ч d ю щ а яс я тем, что, с цельюувелпчения быстродействия и повышения достоверност ; работы ciicтемы, в нее введены дополнительный блок преобразования, два блока формирования пороговых значен1 й, второй блок сравнения, ретий элемент Г п элемент ИЛИ, подкл:оченный своими входами к выходам первого и третьего элементов И, выходом - к первым входам блоков формирования пороговых значений и к третьему входу блок; регистрации, подсоединенного четвертым входок к первому выходу- второго блока сравнения и первому входу третьего элемента I-i, второй выход блока сравнения соединен с вхоаа П1 блоков преобразования и с третьими входами первого и второго элементов И, первый вход второго блока сравпения подключен к выходу допол-нительного блока преобразования, входы которогО соединены с соответствующими выходами датчика случайных чисел и входом системы, вторые Гзходы блоков сравне)Л1Я подключены к выходам соответствующих блоков формирования пороговых значений, вторые входы которых соединены с вьтходоьг блока ; правления, третьи входы - с выxoдo fвторого элемента И, второй вход третьего элемента И соединен с первым выходом датчика случайных чисел.
16
17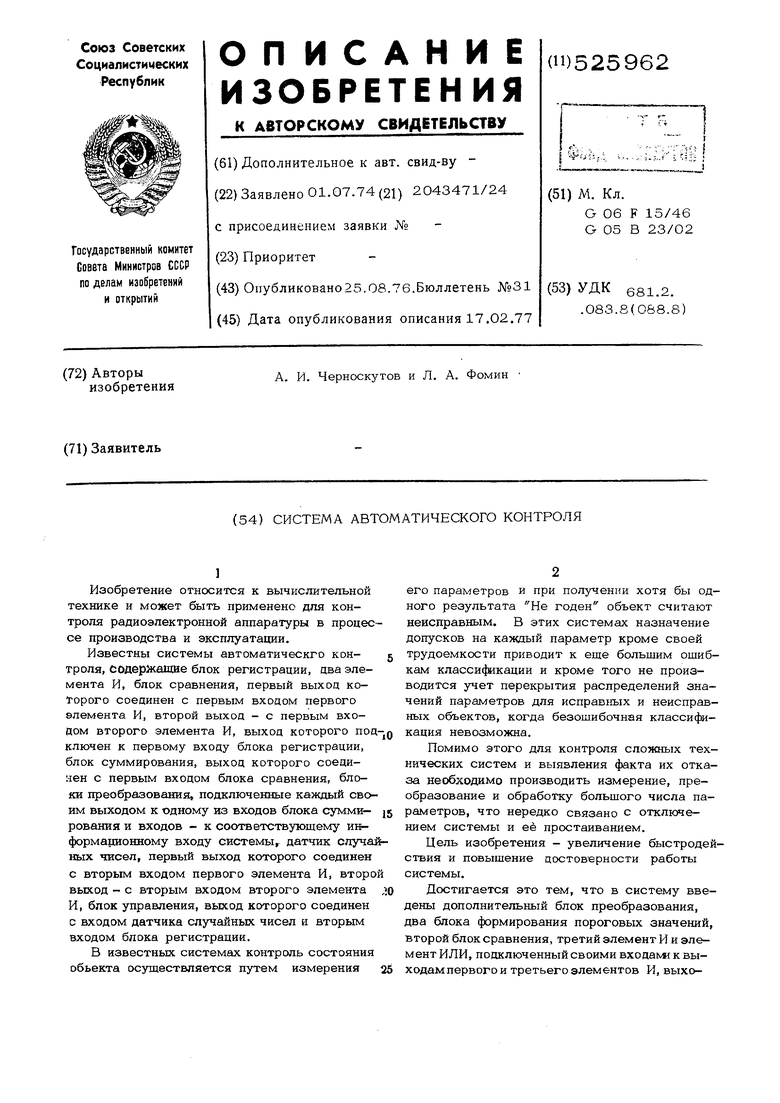
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450335C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312389C1 |
| Устройство для контроля состояния объекта | 1973 |
|
SU483671A1 |
| Способ выявления неисправностей и отказов бортовых измерителей параметров движения и спутниковых навигационных систем движущихся объектов | 2017 |
|
RU2668597C1 |
| УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОГО МОДЕЛИРОВАНИЯ СОСТОЯНИЯ ОБЪЕКТА ИСПЫТАНИЙ | 1991 |
|
RU2010323C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОТКАЗОВ В РЕЗЕРВИРОВАННОЙ СИСТЕМЕ | 2011 |
|
RU2487389C2 |
| Устройство для автоматического контроля блоков памяти | 1976 |
|
SU610180A1 |
| Устройство контроля датчиков | 1983 |
|
SU1087963A1 |
| Обнаружитель ошибок пересчетного устройства | 1980 |
|
SU928656A1 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |