Изобретение относится к способам выявления неисправностей и отказов бортовых измерителей параметров движения (например, ДИСС, баровысотомер, радиовысотомер и др.) и спутникового навигационного оборудования движущихся объектов, что может повысить функциональную надежность эксплуатации данных систем. Для реализации заявленного технического решения на основе динамических свойств объекта прогнозируется область пространства возможного местоположения объекта в момент последующих спутниковых навигационных измерений. Скорректированным местоположением объекта в пространстве при последующих спутниковых навигационных измерениях считается пересечение областей пространства последующих спутниковых навигационных измерений с прогнозируемыми областями. Сопоставляя и статистически анализируя области пространства последовательных спутниковых навигационных измерений местоположения объекта и прогнозируемую область пространства возможного местоположения объекта (исходя из его динамических свойств по перемещению в пространстве) в моменты последующих измерений, можно делать выводы о достоверности показаний спутниковых навигационных средств или показаний бортовых измерителей параметров движения.
Способ может найти применение в системах навигации, в системах ближней навигации и посадки, наведения, в системах управления и автоматического управления движущимися объектами, в системах управления воздушным движением и системах предупреждения столкновений, в системах автоматической стыковки движущихся объектов и др.
В настоящее время известны различные способы выявления неисправностей и отказов бортовых измерителей параметров движения и спутникового навигационного оборудования движущихся объектов. В частности:
- используются различные виды резервирования и аппаратной избыточности;
- используются средства комплексной обработки измерительной информации;
- используется комплексирование устройств и средств контроля навигационных и бортовых измерителей;
- используется широковещательный опрос стационарных и подвижных объектов с известными координатами и на каждой подвижной приемопередающей радиостанции, вычисляют разности между собственными координатами и координатами передающей радиостанции на момент получения сообщения и расстояние до соответствующей подвижной передающей радиостанции, а по величине задержки принятого кодированного сообщения вычисляют соответствующую псевдодальность, разность между псевдодальностью и указанным расстоянием;
- осуществляют повышение надежности функционирования навигационных и бортовых измерителей на определенных этапах полета, в частности при заходе на посадку за счет методов комплексной обработки информации СНС и данных систем посадки;
- осуществляют повышение надежности функционирования навигационных и бортовых измерителей за счет специальных устройств восстановления рабочего состояния после кратковременного пропадания данных (напряжения) на борту.
Известен способ (патент RU 2487389 G05B 23/02, G01R 31/02 опуб. 10.07.2013) формирования сигналов оповещения об отказе элементов в резервированных системах радиоавтоматики и системах автоматического управления летательными аппаратами, основанный на принципах мажоритарной логики и обеспечением возможности формирования не только сигналов об отказе рабочего элемента резервированной системы, но и сигналов, содержащих информацию о таких типах отказов (сбоев), как скачки параметров рабочего элемента системы вверх (типа короткого замыкания) или вниз (типа обрыв соединения), а также их плавного изменения такого же характера, путем использования в обнаружителе новых каналов фиксации направления скачков параметров рабочего элемента импульса и средств их преобразования и коммутации. Патент RU 2551813 G06F 11/20 опуб. 27.05.2015 описывает устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой. Устройство обеспечивает повышение эффективности функционирования резервированной системы с выбором среднего арифметического значения выходных параметров резервируемых элементов. В патенте RU 2629454 G06F 11/16 опуб. 29.08.2017 приведен способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ за счет многократного резервирования технических средств на борту воздушного судна. В основу предлагаемых способа и устройства положено многократное резервирование каналов информационного обмена, датчиков, вычислителей, средств контроля и исполнительных механизмов. Управление аппаратной и вычислительной избыточностью осуществляется в зависимости от состояния системы программно-алгоритмически и аппаратно. В патенте RU 2485446 G01C 21/00 20.06.2013 описана интегрированная система резервных приборов на борту летательного аппарата..
Все виды повышения живучести, надежности и отказобезопасности бортовых измерителей навигационных средств за счет резервирования и формирования аппаратной избыточности с различными видами принятия решения, в том числе и на принципах мажоритарной логики обладают общими недостатками по массогабаритным и энергетическим показателям.
Другим наиболее используемым средством повышения надежности и отказобезопасности бортового оборудования являются средства комплексной обработки измерительной информации. В патенте RU 2546076 G05B 23/00 опуб. 10.04.2015 приведено описание устройства комплексного контроля инерциальной системы. Изобретение относится к области контроля исправности систем управления маневренных подвижных объектов и, в частности, к средствам комплексного аппаратурно безизбыточного контроля платформенных и бесплатформенных инерциальных систем с датчиками ускорений, пилотируемых и беспилотных наземных, воздушных и космических аппаратов. Устройство использует информацию датчиков, уже имеющихся на борту, и входящих в состав штатного приборного оборудования. В патенте RU 2461040 G05B 23/00 опуб. 10.09.2012 приведено устройство для комплексного контроля датчиков подвижного объекта. Изобретение относится к области комплексного контроля датчиков пилотажно-навигационного комплекса управления подвижного объекта, а также к средствам аппаратурно безизбыточного контроля ориентации и навигации летательных аппаратов. Известны схемы контроля датчиков параметров измерительных каналов объекта с применением вычислительного устройства и устройства сравнения порогов оценки результатов измерений сигналов и параметров движения. Схема контроля реализует n-кратное измерение контролируемого параметра и вычисление отношения правдоподобия с учетом среднего риска принятия решения об исправности.
Известно устройство распределенной вычислительной системы сбора полетной информации, контроля и диагностики бортовых систем "Регата" [2]. Сложность устройства "Регата", как централизованной интегральной системы контроля всего самолета, и как результат его низкая собственная надежность отрицательно влияют на достоверность обнаружения отказов отдельных особенно высоконадежных систем, каким и является пилотажно-навигационный комплекс. Известно "Устройство для комплексного контроля датчиков пилотажной информации (варианты)" (Патент RU 2063647 G05B 23/02, опуб. 10.07.96), содержащее датчик нормальной угловой скорости объекта, датчик поперечной угловой скорости объекта, датчик нормальной перегрузки объекта, датчик поперечной перегрузки объекта, датчик синуса крена объекта, датчик косинуса крена объекта, датчик косинуса тангажа объекта, датчик продольной скорости объекта. В патенте RU 2617565 G01C 21/02, G01C 23/00 опуб. 25.04.2017 излагается способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы. Способ обеспечивает повышение точности и быстродействия оптимального оценивания и коррекции всех измеряемых инерциальной навигационной системой (ИНС) навигационных и пилотажных параметров. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы заключается в том, что используют традиционную процедуру оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника гироплатформы (ГП) ИНС, сформированных по измерениям спутниковой навигационной системы (СНС), а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок.
При комплексной обработке измерительной информации для достоверного контроля необходимо иметь точное и известное во времени описание законов распределений всех контролируемых параметров движений объекта, что для маневренного объекта практически невозможно. Усложнение схемы контроля при построении оптимального решающего правила и аддитивной связи контролируемых сигналов датчиков и погрешностей их измерений приводит к проверке сложных гипотез контроля. Такой контроль при широких диапазонах изменения проверяемых сигналов крена, тангажа, линейных и угловых скоростей, перегрузок объекта крайне затруднен.
Для повышения надежности и отказобезопасности бортового оборудования летательного аппарата активно применяются методы комплексирования устройств и средств контроля навигационных и бортовых измерителей: «Бортовая система содействия пилотированию летательного аппарата, основанная на системе GNSS, имеющая избыточную и несходную архитектуру для повышенного уровня достоверности» (патент RU 2621827 G08G 5/00, G01S 19/00, G01S 19/00, опуб. 07.06.2017); «Система комплексной обработки информации радионавигационных и автономных средств навигации для определения действительных значений параметров самолетовождения» (патент RU 2487419 G08G 5/04, опуб. 10.07.2013); полезная модель «Система навигации» (патент на полезную модель RU 169910 G01C 21/10, опуб. 05.04.2017). Данные варианты комплексирования бортового оборудования летательного аппарата позволяют обеспечить повышение надежности и отказобезопасности бортового оборудования летательного аппарата, но требуют дополнительных аппаратных средств обеспечения комплексирования оборудования.
Для повышения функциональной надежности навигационных определений летательного аппарата возможно использовать широковещательный опрос стационарных и подвижных объектов с известными координатами и на каждой подвижной приемопередающей радиостанции, вычисляют разности между собственными координатами и координатами передающей радиостанции на момент получения сообщения и расстояние до соответствующей подвижной передающей радиостанции, а по величине задержки принятого кодированного сообщения вычисляют соответствующую псевдодальность, разность между псевдодальностью и указанным расстоянием (патент RU 2333538 G08G 5/00, B64D 45/00, опуб. 10.09.2008 «Способ индикации положения объектов наблюдения»). Недостатками такого способа является незащищенность указанного от искажения принимаемых данных, вызванного влиянием как случайных помех в радиоканале, ошибок при кодировании и декодировании сигналов в передающем и приемном трактах, а также и специально организованных помехах и преднамеренной передачи заведомо ложных данных о координатах.
Еще одним вариантом повышения надежности и отказобезопасности бортового оборудования летательного аппарата являются методы комплексной обработки информации СНС и данных систем посадки и формирование траектории полета на определенных этапах, в частности при заходе на посадку. Известен «Способ управления летательным аппаратом при заходе на посадку» (патент RU 2496131 G05D 1/08, G01C 21/06, опуб. 20.10.2013). При данном способе построение траектории посадки осуществляется не с помощью наземных радиотехнических устройств (КРМ и ГРМ), а полностью на борту ЛА с использованием задаваемого экипажем угла наклона траектории посадки, точных данных о координатах и высоте ЛА, полученных путем комплексной обработки информации от ИНС, СВС и СНС, а также параметров так называемого "виртуального курсо-глиссадного радиомаяка" (ВКГРМ). В патенте RU 2520872 G01S 13/00, G05D 1/10, опуб. 27.06.2014 «Комплексная система управления траекторией летательного аппарата при заходе на посадку» Система включает инерциальную навигационную систему, систему воздушных сигналов, индикатор посадочных сигналов (ИПС), блок комплексной обработки информации (КОИ), спутниковую навигационную систему, блок памяти, блок определения параметров взлетно-посадочной полосы (ВПП), блок определения местоположения виртуального курсо-глиссадного радиомаяка (ВКГРМ), блок определения пеленга и дальности ВКГРМ, первый и второй сумматоры, блок определения угла места ВКГРМ. Технический результат заключается в повышении надежности и безопасности совершения посадки летательного аппарата.
Однако, данные способы повышения надежности и отказобезопасности бортового оборудования летательного аппарата возможны только на ограниченном участке полета, на траектории захода на посадку.
Предлагаемое заявленное техническое решение изобретения и предлагаемое устройство в качестве прототипа используют «Способ определения местоположения подвижного объекта при навигационных измерениях», описанный в патенте RU 2529016 G01S 19/45, опуб. 27.09.2014. Применяя данный способ, возможно формирование критерия для выявления неисправностей и отказов бортовых измерителей параметров движения и спутникового навигационного оборудования движущихся объектов.
Задача, на решение которой направлено заявленное техническое решение изобретения и предлагаемое устройство заключается в расширении арсенала технических средств выявления отказов и сбоев в работе бортовых измерителей параметров движения объекта (БИ) и спутниковой навигационной системы (СНС).
Техническим результатом является повышение живучести, надежности и отказобезопасности бортовых измерителей параметров движения объекта и спутниковой навигационной системы. В патенте RU 2529016 G01S 19/45, опуб. 27.09.2014 [1] описан способ, где на основе динамических свойств объекта прогнозируется область пространства возможного местоположения объекта в момент последующих навигационных измерений. Скорректированным местоположением объекта в пространстве при последующих навигационных измерениях считается пересечение областей пространства последующих навигационных измерений с прогнозируемыми областями. Способ определения местоположения объекта в пространстве, уточняя навигационные данные за счет наложения ограничений, связанных с динамическими свойствами движущегося объекта можно назвать методом динамической рекуррентной коррекции (ДРК). Результаты метода динамической рекуррентной коррекции используются в заявленном техническом решении изобретения и предлагаемом устройстве.
Пусть по данным результатов навигационных измерений в момент времени t задана область пространства Λ. Ее можно представить в дискретном виде как
 ;
;  ;
;  , где m=0…М=2hx/Δx; n=0…N=2hy/Δy; k=0…K=2hz/Δz m; n; k - целые числа (индексы разбиения по координатам). Значения hx; hy; hz - максимальная погрешность измерения координат движущегося тела с вероятностью не менее p(0,95), т.е.
, где m=0…М=2hx/Δx; n=0…N=2hy/Δy; k=0…K=2hz/Δz m; n; k - целые числа (индексы разбиения по координатам). Значения hx; hy; hz - максимальная погрешность измерения координат движущегося тела с вероятностью не менее p(0,95), т.е. 
 ;
;  ;
;  с вероятностью p(0,95); Δx; Δy; Δz интервалы разбиения (можно трактовать как интервалы разбиения для обеспечения необходимой точности дискретизации пространства). Рассмотрим последовательные навигационные измерения в моменты времени t1-tn определяющие области пространства Λ1-Λn местоположения объекта в моменты времени
с вероятностью p(0,95); Δx; Δy; Δz интервалы разбиения (можно трактовать как интервалы разбиения для обеспечения необходимой точности дискретизации пространства). Рассмотрим последовательные навигационные измерения в моменты времени t1-tn определяющие области пространства Λ1-Λn местоположения объекта в моменты времени  ;
;  ;
;  - данные навигационных измерений в моменты времени t1-tn. Для прогнозирования области каждого последующего навигационного измерения ΛПР выбираются параметры ограничения местоположения объекта из-за его динамических свойств, в качестве которых могут выступать: - максимальная скорость и ускорение (в зависимости от задач могут быть вертикальная и горизонтальная, курсовая и снижения, прочие линейные и угловые скорости и ускорения); - максимальное изменение угла азимута (или рыскания); угла места (или крена) или прочие параметры.
- данные навигационных измерений в моменты времени t1-tn. Для прогнозирования области каждого последующего навигационного измерения ΛПР выбираются параметры ограничения местоположения объекта из-за его динамических свойств, в качестве которых могут выступать: - максимальная скорость и ускорение (в зависимости от задач могут быть вертикальная и горизонтальная, курсовая и снижения, прочие линейные и угловые скорости и ускорения); - максимальное изменение угла азимута (или рыскания); угла места (или крена) или прочие параметры.
Обобщенные условия ограничения местоположения объекта по данным навигационных измерений и динамических свойств объекта можно записать так:
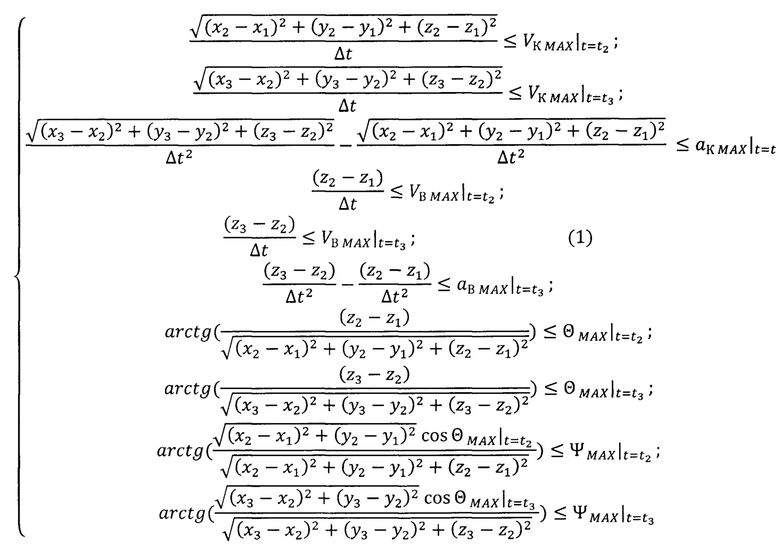
при этом:

t1-t3 - моменты времени трех последовательных навигационных измерений. Данные неравенства следует трактовать следующим образом:
- первое неравенство - скорость прохождения объектом пути за время Δt между первым и вторым измерением не может превышать максимально возможную курсовую скорость;
- второе неравенство - аналогично, но между вторым и третьим измерением;
- третье-неравенство - курсовое ускорение объекта не должно превышать максимально возможное;
- четвертое - шестое неравенство аналогично 1-3 неравенству для вертикальной скорости и ускорения;
- седьмое-восьмое неравенство определяет максимально возможный угол наклона объекта от вертикали (что фактически определяет угол тангажа) для второго и третьего измерения;
- девятое-десятое неравенство определяет максимально возможный угол отклонения от курса для второго и третьего измерения.
Для повышения точности местоположения объекта в пространстве возможно использование не предельных значений скоростей, ускорений и изменения угловых положений объекта, а текущих реальных данных бортовых измерителей (БИ) параметров движения объекта (скоростей, углов, ускорений). Максимальные параметры VK МАХ; аK MAX; VB МАХ; аB MAX; ΘМАХ; ΨМАХ определяются текущими показаниями бортовых измерителей, их погрешностями, показаниями датчиков ветра и направлением ветра, а также приращением измеряемых параметров за время между навигационным измерением и ближайшим после него поступлением информации от бортового измерителя.
В этом случае (и с учетом влияния ветра) значения VK MAX; аК МАХ; VB MAX; аВ МАХ; ΘМАХ; ΨМАХ в системе неравенств (1) обобщенных условий ограничения местоположения объекта по данным навигационных измерений можно записать как показания бортовых измерителей следующим образом:
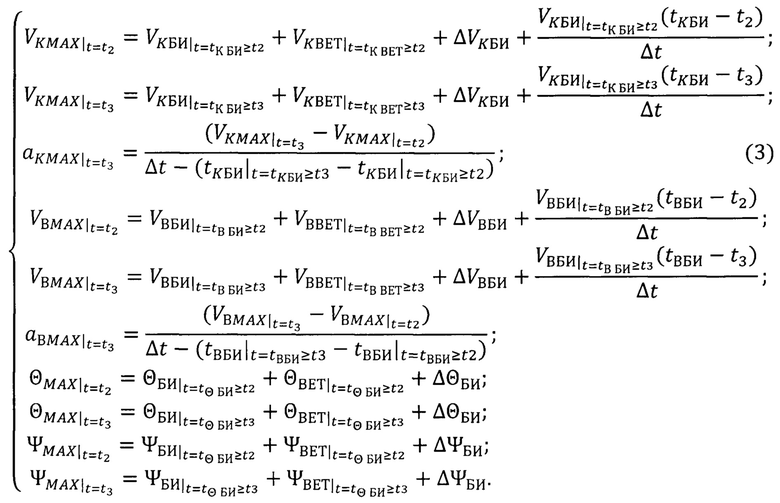
где
1.  ;
;  - значение курсовой скорости по показаниям бортового измерителя в моменты времени поступления информации от бортового измерителя сразу же после навигационных измерений в моменты t2 и t3;
- значение курсовой скорости по показаниям бортового измерителя в моменты времени поступления информации от бортового измерителя сразу же после навигационных измерений в моменты t2 и t3;
2.  ;
;  - составляющая курсовой скорости вследствие влияния ветра (по данным датчиков ветра) сразу же после навигационных измерений в моменты t2 и t3;
- составляющая курсовой скорости вследствие влияния ветра (по данным датчиков ветра) сразу же после навигационных измерений в моменты t2 и t3;
3. ΔVKБИ - погрешность показаний бортового измерителя курсовой скорости;
4.  ;
;  ;
;  ;
;  ; ΔVВБИ - значения вертикальной скорости по показаниям бортового измерителя, данным датчиков ветра и погрешность показаний бортового измерителя вертикальной скорости;
; ΔVВБИ - значения вертикальной скорости по показаниям бортового измерителя, данным датчиков ветра и погрешность показаний бортового измерителя вертикальной скорости;
5.  - частота обновления показаний бортового измерителя курсовой скорости;
- частота обновления показаний бортового измерителя курсовой скорости;
6.  - частота обновления показаний бортового измерителя вертикальной скорости;
- частота обновления показаний бортового измерителя вертикальной скорости;
7.  ;
;  - значение угла наклона объекта от вертикали (что фактически определяет угол тангажа) по показаниям бортового измерителя сразу же после навигационных измерений в моменты t2 и t3;
- значение угла наклона объекта от вертикали (что фактически определяет угол тангажа) по показаниям бортового измерителя сразу же после навигационных измерений в моменты t2 и t3;
8.  ;
;  - составляющая угла наклона объекта от вертикали вследствие влияния ветра (по данным датчиков ветра) сразу же после навигационных измерений в моменты t2 и t3;
- составляющая угла наклона объекта от вертикали вследствие влияния ветра (по данным датчиков ветра) сразу же после навигационных измерений в моменты t2 и t3;
9. ΔΘБИ - погрешность показаний бортового измерителя угла наклона объекта от вертикали;
10.  ;
;  ;
;  ;
;  ; ΔΨБИ - значения угла отклонения курса по показаниям бортового измерителя, данным датчиков ветра и погрешность показаний бортового измерителя угла отклонения курса.
; ΔΨБИ - значения угла отклонения курса по показаниям бортового измерителя, данным датчиков ветра и погрешность показаний бортового измерителя угла отклонения курса.
Значения погрешностей показаний бортовых измерителей и частота обновления информации на них определяется тактико-техническими характеристиками конкретных приборов. Зачастую, значение максимальной погрешности с вероятностью не менее p(0,95) измерений выражается в процентном отношении от значений измеряемых параметров. Таким образом, используя ограничения на возможность передвижения объекта можно прогнозировать область пространства возможного местоположения каждого последующего после начального навигационного измерения.
В результате применения алгоритма динамической рекуррентной коррекции [1], определяется скорректированная область пространства после третьего последовательного навигационного измерения Λкор оконч с вероятностью не менее р=0,95.
Неисправностями и отказами бортовых измерителей параметров движения и навигационного оборудования движущихся объектов можно считать ситуации, когда данные последующих навигационных измерений не согласуются с данными, прогнозируемым по динамическим характеристикам местоположением объекта. В данном случае результат пересечения прогнозируемой области возможного местоположения объекта или равен пустому множеству (нет пересечения) или ниже какого-то порогового уровня, по которому можно сказать, что прогнозирование было не точным или последующие навигационные показания сделаны с слишком высокой погрешностью.
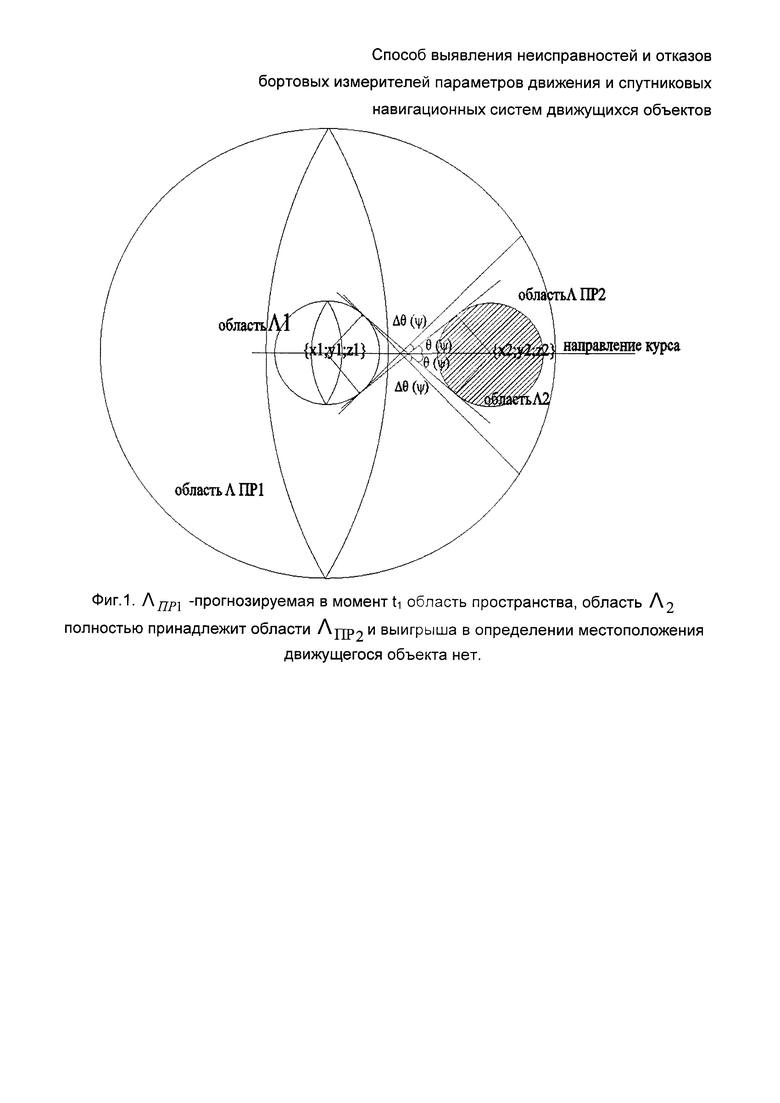
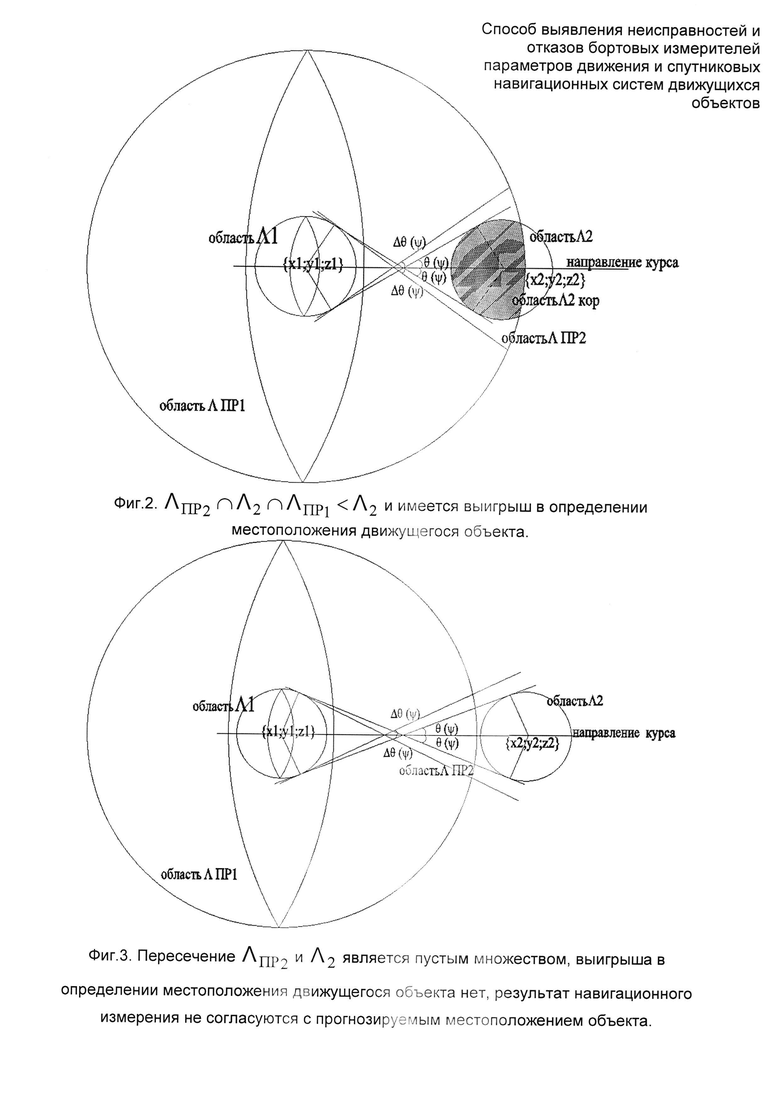
Пусть Λ1; Λ2; Λ3 - области пространство 1, 2 и 3 измерения, ΛПР1; ΛПР2 - прогнозируемые области пространства после 1 и второго навигационного измерений. Возможны следующие случаи прогнозирования положения объекта [1], они схематично показаны на Фиг. 1-3. В первом случае (Фиг. 1) область Λ2 полностью принадлежит области ΛПР2 и выигрыша в определении местоположения движущегося объекта нет. Во втором случае (Фиг. 2) ΛПР2∩Λ2∩ΛПР1<Λ2 и имеется выигрыш в определении местоположения движущегося объекта. В третьем случае (Фиг. 3) пересечение ΛПР2 и Λ2 является пустым множеством.
В третьей ситуации с установленной вероятностью (например, p(0,95)) можно утверждать, что такого значения измерения быть не должно. Однако, такие случаи возможны вследствие выхода измеряемой величины за пределы интервала в p(0,95), отказов навигационных средств или бортовых измерителей параметров движения, а также при прохождении летательных аппаратов через «пораженные зоны». Обычно полагают, что значения hx; hy; hz=const, но на отдельных участках траектории движения в «пораженных зонах» где из-за дестабилизирующих факторов (погодных условий, рельефа местности, помех, переотражений, радиопротиводействия и пр.) максимальная погрешность навигационных измерений hx; hy; hz или бортовых измерителей параметров движения ΔVK БИ; ΔVB БИ; ΔΘБИ; ΔψБИ не является постоянной и резко возрастает. Отдельные подобные случаи можно полагать промахами, но при их повторении в выборке накопленных значений навигационных измерений (измерений бортовых измерителей параметров движения) более критического значения, показания навигационной системы (бортовых измерителей) можно считать не достоверными (произошел сбой, отказ вследствие роста максимальной p(0,95) погрешности измерений).
При анализе возможностей выявления сбоев и отказов показания спутниковой навигационной системы или бортовых измерителей примем некоторые допущения:
- потоки данных от СНС и бортовых измерителей будем считать дискретными последовательностями случайных величин с постоянной составляющей и с постоянными периодами обновления информации;
- частота обновления данных от бортовых измерителей параметров движения выше (или значительно выше) чем у СНС;
- погрешности измерений БИ и погрешности измерений СНС статистически независимы в виду принципиальных различий в физическом принципе действия данного оборудования;
- погрешность каждого последующего и сами значения измерений СНС и БИ не зависят от результатов предыдущих измерений и их погрешностей, они статистически независимы;
- будем полагать, что для спутниковой навигационной системы и всех видов бортовых измерителей параметров движения объекта установлены критические уровни роста максимальной погрешности измерений, при которых использование данного оборудования запрещается, и данным критическим уровням соответствуют ошибки прогнозирования (или ошибки последующих навигационных измерений), когда (ΛПР∩ΛИЗМ)/ΛИЗМ≤KП0Р. Здесь ΛПР - прогнозируемая область пространства последующего навигационного измерения, ΛИЗМ - область пространства измеренного последующего навигационного измерения, KПОР - пороговый коэффициент, определяющий минимальную область пересечения областей. Если KПОР=0, то пересечения областей пространства нет (Фиг. 3);
- рост максимальной погрешности измерений спутниковой навигационной системы hx; hy; hz или бортовых измерителей ΔVК БИ; ΔVВ БИ; ΔΘБИ; ΔψБИ в «пораженных зонах», который для данного СНС или БИ является критическим будем трактовать как восстанавливаемый отказ СНС или БИ;
- будем полагать, что все отказы и сбои в показаниях навигационной системы и бортовых измерителей существуют в трех проявлениях: - перестает поступать информация от СНС или БИ; - показания от СНС или БИ почти не меняются (наблюдается незначительные отклонения одного и того же показания), т.е. «датчик зависает»; - показания от СНС или БИ не верны в силу роста максимальной погрешности измерений. Первый тип неисправности выявляется самой системой СНС или БИ, второй тип неисправности выявляется резервированием, и в дальнейшем будем полагать, что условие (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР соответствует только случаю роста максимальной погрешности измерений СНС или БИ;
- при повторении в выборке из m накопленных навигационных измерений при применении алгоритма ДРК [1], n последовательных значений когда выполняется условие (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР показания навигационной системы (бортовых измерителей) можно считать не достоверными вследствие роста максимальной погрешности измерений. Разобьем диапазон последовательных полученных данных от СНС с частотой обновления информации Δt после применения алгоритма ДРК на диапазон из m-n значений (в промежутке времени от ti÷tj), когда выполняется условие (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР и диапазон n значений (в промежутке времени от tj÷tk), когда (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР. Здесь n необходимое количество последовательных измерений в выборке m для того, чтобы утверждать, что они выходят из доверительного диапазона для заданного уровня р(0,95) и заданного закона распределения случайной дискретной величины погрешности навигационного измерения, и можно сделать вывод, что показания навигационной системы (бортовых измерителей) можно считать не достоверными вследствие роста максимальной погрешности измерений. При этом i; j; k индексы и m=k-i; n=k-j;
- в рамках локальных диапазонов последовательных полученных данных от СНС с частотой обновления информации Δt после применения алгоритма ДРК, ограниченных временными промежутками от ti÷tj из m-n значений и в промежутке времени от tj÷tk из n значений распределение дискретной случайной величины погрешности измерений будем считать стационарной (локально стационарной по поддиапазонам).
Для реализации заявленного технического решения предлагается следующая последовательность (алгоритм) обработки поступающей навигационной информации и данных от бортовых измерителей параметров движения.
Шаг 1. Для используемой спутниковой навигационной системы и бортовых измерителей параметров движения определяется (устанавливается) порог KПОР соотношения прогнозируемой области возможного местоположения объекта в момент последующего навигационного измерения и область пространства последующего навигационного измерения, определяемого по алгоритму ДРК [1].
Шаг 2. Для заданного закона распределения дискретной случайно величины навигационного измерения и заданного уровня р(0,95) определяются значения m и n, т.е. общий объем контролируемых значений выборки m и минимальное количество n значений последовательных навигационных измерений в выборке m при которых выполняется условие (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР.
При выполнении данного условия в n последовательных измерениях делается вывод, что показания навигационной системы или бортовых измерителей параметров движения являются не достоверными вследствие сбоя (роста максимальной погрешности измерения для уровня р(0,95)) СНС или БИ. Дальнейшие шаги направлены на выявление конкретной системы (СНС или какой-то БИ) в которой произошел сбой.
Шаг 3. Для выявления конкретной системы (СНС или какой-то БИ) где произошел сбой, рассмотрим ММП оценки автокорреляционных функций (АКФ) дискретных случайных величин распределения показаний СНС и бортовых измерителей на промежутках от ti÷tj из (m-n) значений и в промежутке времени от tj÷tk из n значений. Пусть имеются:
 ;
;  - ММП оценки показаний АКФ дискретных случайных величин KПОР (после применения алгоритма ДРК [1]) для промежутков времени от ti÷tj и от tj÷tk соответственно;
- ММП оценки показаний АКФ дискретных случайных величин KПОР (после применения алгоритма ДРК [1]) для промежутков времени от ti÷tj и от tj÷tk соответственно;
 ;
;  - ММП оценки показаний АКФ дискретных случайных величин навигационных измерений СНС для промежутков времени от ti÷tj и от tj÷tk соответственно;
- ММП оценки показаний АКФ дискретных случайных величин навигационных измерений СНС для промежутков времени от ti÷tj и от tj÷tk соответственно;
 ;
;  - ММП оценки показаний АКФ дискретных случайных величин показаний БИ №1 для промежутков времени от ti÷tj и от tj÷tk соответственно;
- ММП оценки показаний АКФ дискретных случайных величин показаний БИ №1 для промежутков времени от ti÷tj и от tj÷tk соответственно;
аналогично,  ;
;  - ММП оценки показаний АКФ дискретных случайных величин показаний n-го БИ для промежутков времени от ti÷tj и от tj÷tk соответственно.
- ММП оценки показаний АКФ дискретных случайных величин показаний n-го БИ для промежутков времени от ti÷tj и от tj÷tk соответственно.
Полагаем, что рост максимальной погрешности измерения для уровня р(0,95) произошел у той системы (СНС или БИ), у которой будет минимальное соотношение модулей оценок АКФ на участках измерений ti÷tj и tj÷tk

Шаг 4. Другим фактором выявления системы (СНС или какой-то БИ), где произошел рост максимальной погрешности измерения для уровня p(0,95) на каком-то достаточном интервале из n измерений, должно стать условие, что результаты последовательных значений определения KПОР по алгоритму ДРК [1] на «пораженном участке» измерений в диапазоне tj÷tk должно коррелироваться в большей степени с показателями системы (СНС или какой-то БИ), где произошел сбой, а модуль разницы ММП оценок показаний АКФ дискретных случайных величин измерений на участке tj÷tk будет максимальной (5).

Шаг 5. Системой (СНС или какой-то БИ), где произошел сбой (рост максимальной погрешности измерения для уровня p(0,95) на каком-то достаточном интервале из n измерений) на «пораженном участке» в диапазоне tj÷tk, считаем ту систему, для которой выполняются условия (4) и (5) одновременно.
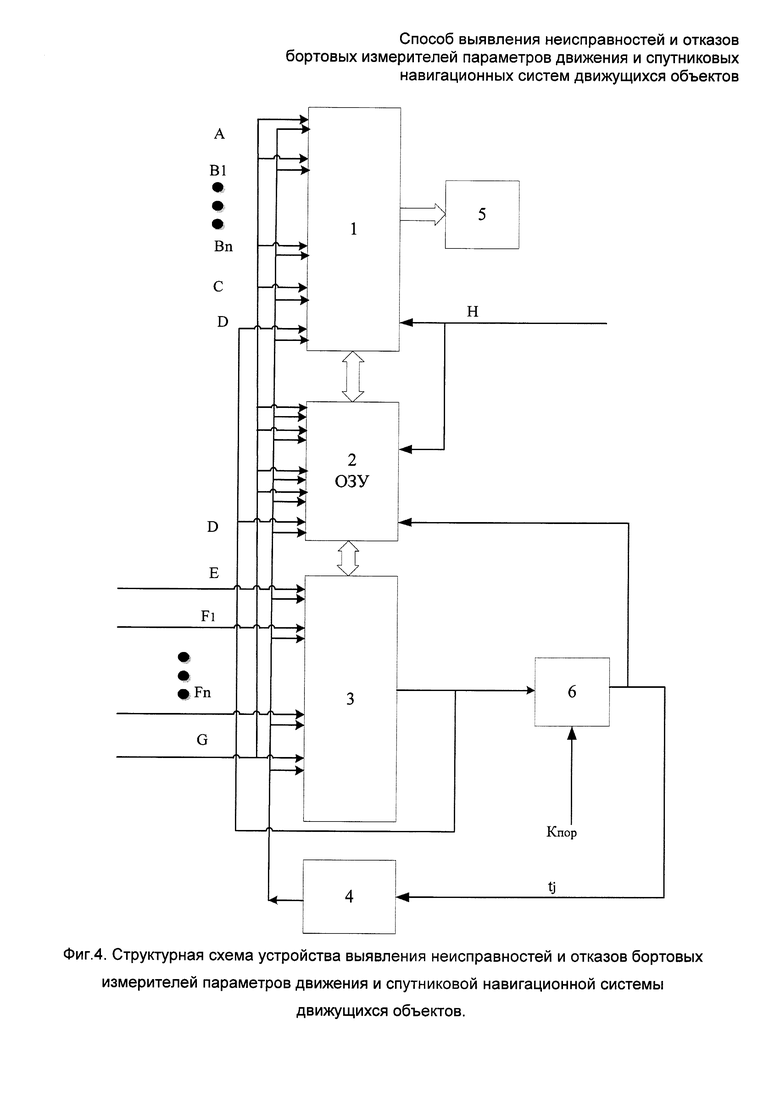
Сущность изобретения поясняется структурной схемой возможного устройства выявления неисправностей и отказов бортовых измерителей параметров движения и спутниковых навигационных систем движущихся объектов, приведенной на Фиг. 4. Устройство состоит из вычислительного блока 3, в который поступают данные текущих измерений от СНС (вход Е), бортовых измерителей параметров движения объекта БИ1…БИn (входы F1 - Fn) и датчика ветра (вход G). Блок 3 реализует вычисление скорректированного местоположения объекта по алгоритму динамической рекуррентной коррекции [1]. Для фиксации временных отрезков поступления сигналов СНС, БИ и датчика ветра на вычислительный блок 3 подаются сигналы временной синхронизации с устройства временной синхронизации 4. Блок 3 выполняет вычисление скорректированного объема пространства по алгоритму ДРК, а в блоке 6 (схема сравнения) происходит сравнение отношения прогнозируемой области пространства к области пространства текущего навигационного измерения с пороговым значением (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР. Пороговое значение вводится в блок 6. Прогнозируемые значения области пространства возможного местоположения объекта хранятся в оперативном запоминающем устройстве (ОЗУ), блок 2.
При выполнении условия ΛПР/ΛИЗМ≤KПОР. На выходе блока 6 формируется сигнал, который является управляющим для записи стека в ОЗУ (блок 2) и формирует момент времени tj для устройства временной синхронизации 4. В ОЗУ хранятся все промежуточные результаты измерений СНС, БИ и датчика ветра в диапазоне не менее m последовательных измерений (для СНС как системы с самой низкой частотой обновления информации) и n измерений с момента времени tj. (сигнал управления стеком для ОЗУ). Вместе со значениями измерений в ОЗУ записываются также временные отрезки поступления данных от СНС, БИ и датчика ветра. В ОЗУ вводятся (вход Н) размерности стека m выборки количества значений измерений и величина n - величина выборки количества измерений при которых должно выполняться условие (ΛПР∩ΛИЗМ)/ΛИЗМ≤KПОР.
На блок 1 подаются сигналы от СНС (вход А), БИ (входы В1 - Bn) и датчика ветра (вход С). Кроме того, на блок 1 подаются выходные данные расчетов по алгоритмы ДРК с выхода блока 3 (вход D). Для фиксации временных отрезков поступления данных от СНС, БИ и датчика ветра, на блок 1 подаются также сигналы временной синхронизации с устройства временной синхронизации 4. Блок 1 представляет собой коррелятор - вычислительное устройство, которое находит оценки АКФ данных измерений СНС, БИ, датчика ветра и данных вычислений по алгоритму ДРК [1]. Блок 1 производит вычисление по условиям (4) и (5) и выявляет измерительную систему по условиям (4) и (5), в которой наиболее вероятно произошел сбой. Блок 5 является блоком индикации, отображающим систему (СНС или БИ) в которой произошел сбой.
Представленные алгоритмы выявления неисправностей и отказов бортовых измерителей параметров движения и спутникового навигационного оборудования движущихся объектов могут быть и более сложными и использовать схожие алгоритмы статистического анализа на основе ДРК [1]. При практическом применении возможно использование не только СНС, но и другого оборудования определения местоположения подвижного объекта, в том числе показаний специализированных гироскопов, измерителей магнитного поля земли, использование опорных точек с заранее известными геодезическими координатами и наличием канала связи между движущимся объектом и опорным пунктом, известных и с заданной точностью прогнозируемых траекторий движения объекта и т.д.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного устройства для выявления неисправностей и отказов бортовых измерителей параметров движения и спутникового навигационного оборудования движущихся объектов отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменении вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- предлагаемое устройство при его осуществлении, предназначено для использования в навигационной технике и, в частности, для выявления неисправностей и отказов бортовых измерителей параметров движения и спутникового навигационного оборудования движущихся объектов;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Тельный А.В. «Способ определения местоположения подвижного объекта при навигационных измерениях» патент РФ на изобретение №2529016 RU G01S 19/45, опуб. 27.09.2014 г. М.: ФИПС.
2. Ратникова Н.А. Распределенная вычислительная система "Регата" - основа технологии контроля воздушных судов по состоянию // Авиакосмическое приборостроение, 2004, №7
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано в системах выявления неисправностей и отказов бортовых измерителей параметров движения (например, ДИСС, баровысотомер, радиовысотомер и др.) и спутникового навигационного оборудования движущихся объектов. Технический результат - повышение функциональной надежности. Для этого используют основные динамические свойства объекта - прогнозируется область пространства возможного местоположения объекта в момент последующих спутниковых навигационных измерений. При этом скорректированным местоположением объекта в пространстве при последующих спутниковых навигационных измерениях считается пересечение областей пространства последующих спутниковых навигационных измерений с прогнозируемыми областями. Сопоставляя и статистически анализируя области пространства последовательных спутниковых навигационных измерений местоположения объекта и прогнозируемую область пространства возможного местоположения объекта (исходя из его динамических свойств по перемещению в пространстве) в моменты последующих измерений, можно делать выводы о достоверности показаний спутниковых навигационных средств или показаний бортовых измерителей параметров движения. Для реализации способа устройство состоит из вычислительного блока 3, в который поступают данные текущих измерений от СНС (вход Е), бортовых измерителей параметров движения объекта БИ1..БИn (входы F1 - Fn) и датчика ветра (вход G). Блок 3 реализует вычисление скорректированного местоположения объекта по алгоритму динамической рекуррентной коррекции [1]. Для фиксации временных отрезков поступления сигналов СНС, БИ и датчика ветра на вычислительный блок 3 подаются сигналы временной синхронизации с устройства временной синхронизации 4. Блок 3 выполняет вычисление скорректированного объема пространства по алгоритму ДРК, а в блоке 6 (схема сравнения) происходит сравнение отношения прогнозируемой области пространства к области пространства текущего навигационного измерения с пороговым значением (ΛПР ∩ ΛИЗМ)/ΛИЗМ≤KПОР. Пороговое значение вводится в блок 6. Прогнозируемые значения области пространства возможного местоположения объекта хранятся в оперативном запоминающем устройстве (ОЗУ), блок 2. При выполнении условия ΛПР/ΛИЗМ≤KП0Р. На выходе блока 6 формируется сигнал, который является управляющим для записи стека в ОЗУ (блок 2) и формирует момент времени tj для устройства временной синхронизации 4. В ОЗУ хранятся все промежуточные результаты измерений СНС, БИ и датчика ветра в диапазоне не менее m последовательных измерений (для СНС как системы с самой низкой частотой обновления информации) и n измерений с момента времени tj (сигнал управления стеком для ОЗУ). Вместе со значениями измерений в ОЗУ записываются также временные отрезки поступления данных от СНС, БИ и датчика ветра. 4 ил.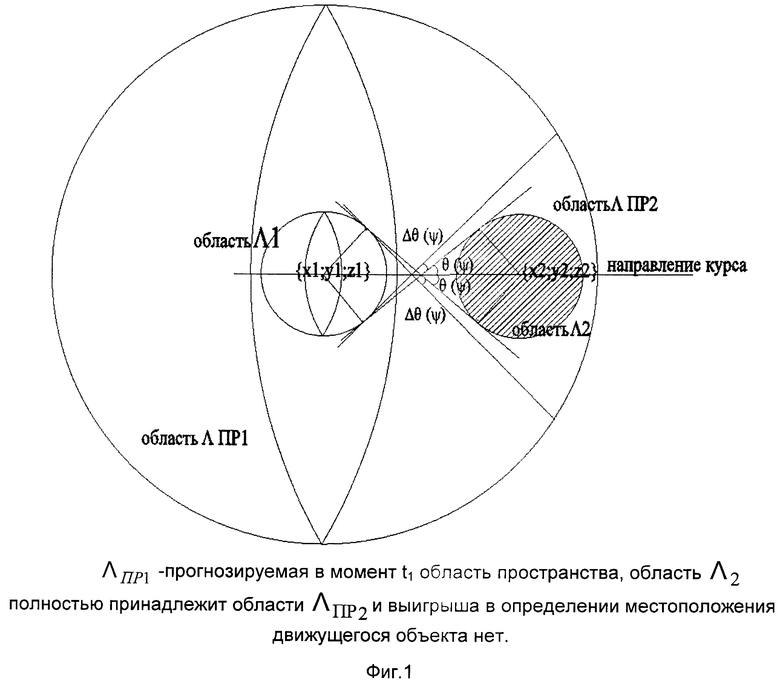
Способ выявления неисправностей и отказов бортовых измерителей параметров движения (БИ) и спутниковых навигационных систем (СНС) движущихся объектов, отличающийся тем, что на основе динамических свойств объекта прогнозируется область пространства возможного местоположения объекта в момент последующих спутниковых навигационных измерений, сопоставляя и статистически анализируя области пространства последовательных спутниковых навигационных измерений местоположения объекта и прогнозируемую область пространства возможного местоположения объекта (исходя из его динамических свойств по перемещению в пространстве) в моменты последующих измерений, используя алгоритм динамической рекуррентной коррекции (ДРК), можно делать выводы о достоверности показаний спутниковых навигационных средств или показаний бортовых измерителей параметров движения, для чего для СНС и БИ определяется (устанавливается) порог КПОР соотношения прогнозируемой области возможного местоположения объекта в момент последующего навигационного измерения и область пространства последующего навигационного измерения, после чего для заданного закона распределения дискретной случайной величины навигационного измерения и заданного уровня р(0,95) определяются значения общего объема контролируемых значений выборки m и минимальное количество n значений последовательных навигационных измерений в выборке m, при которых выполняется условие

где ΛПР - прогнозируемая область пространства последующего навигационного измерения; ΛИЗМ - область пространства измеренного последующего навигационного измерения; KПОР - пороговый коэффициент, определяющий минимальную область пересечения областей,
и при выполнении данного условия в n последовательных измерениях делается вывод, что показания навигационной системы или бортовых измерителей параметров движения являются недостоверными вследствие сбоя (роста максимальной погрешности измерения для уровня р(0,95)) СНС или БИ, далее системой (СНС или какой-то БИ), где произошел сбой на «пораженном участке» в диапазоне tj÷tk, считаем ту систему, для которой одновременно выполняются условия, что будет минимальное соотношение модулей оценок автокорреляционных функций (АКФ) на участках измерений ti÷tj и tj÷tk, а также, что результаты последовательных значений определения КПОР по алгоритму ДРК на «пораженном участке» измерений в диапазоне tj÷tk в большей степени коррелируются с показателями системы (СНС или какой-то БИ), где произошел сбой, а модуль разницы ММП оценок показаний АКФ дискретных случайных величин измерений на участке tj÷tk будет
 и
и


 где
где 
 - ММП оценки показаний АКФ дискретных случайных величин KПОР (после применения алгоритма ДРК [1]) для промежутков времени от ti÷tj и от tj÷tk соответственно,
- ММП оценки показаний АКФ дискретных случайных величин KПОР (после применения алгоритма ДРК [1]) для промежутков времени от ti÷tj и от tj÷tk соответственно, 
 - ММП оценки показаний АКФ дискретных случайных величин навигационных измерений СНС для промежутков времени от ti÷tj и от tj÷tk соответственно,
- ММП оценки показаний АКФ дискретных случайных величин навигационных измерений СНС для промежутков времени от ti÷tj и от tj÷tk соответственно,
 - ММП оценки показаний АКФ дискретных случайных величин показаний БИ №1 для промежутков времени от ti÷tj и tj÷tk соответственно, аналогично,
- ММП оценки показаний АКФ дискретных случайных величин показаний БИ №1 для промежутков времени от ti÷tj и tj÷tk соответственно, аналогично,
 - ММП
- ММП
оценки показаний АКФ дискретных случайных величин показаний n-го БИ для промежутков времени от ti÷tj и от tj÷tk соответственно.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| WO 9004795 A1, 03.05.1990 | |||
| US 6900760 В2, 31.05.2005 | |||
| Способ многоканальной регистрации результатов измерений и устройство для его осуществления | 1990 |
|
SU1747905A1 |

