Область техники, к которой относится изобретение
Изобретение относится к области контроля и управления распределенными системами, в частности к способам контроля и управления телекоммуникационной системой, и может быть использовано при проектировании глобальных систем управления территориально распределенных сетей связи.
Уровень техники
Известны способы оценивания состояния, идентификации и управления техническими системами (см. например Левин Б.Р., Шварц В. Вероятностные модели и методы в системах связи и управления. М.: Радио и связь, 1985). В качестве аналога рассмотрим способ стохастического управления, основанный на оптимальном управлении в условиях случайных помех, при котором по заданным характеристикам известной системы и по известным вероятностным характеристикам помех находят алгоритм управления, обеспечивающий экстремум выбранного критерия качества, при этом исходят из принципа разделения, позволяющего представить задачу стохастического управления в виде комбинации двух задач:
- задачи оптимального оценивания и идентификации состояния системы;
- задачи оптимального детерминированного управления.
Система измерений представляет всю доступную измерению информацию о состоянии системы, находящейся под воздействием случайных возмущений. На основе этой информации формируется алгоритм управления. В задаче оптимального стохастического управления объект управления задается уравнением состояния. Оптимальный стохастический регулятор, как правило, представляет собой фильтр Каллмана для оценки состояния и детерминированный оптимальный регулятор со стохастическим входом.
Таким образом, для осуществления указанного способа необходимы сведения о корреляционных функциях сигнала ошибки, что делает практически невозможным использование данного способа для управления распределенной системой, поскольку в данном случае такие сведения отсутствуют. Кроме того, при осуществлении способа невозможно реально получить и оценить степень сокращения объемов информации, необходимых для управления распределенными системами.
Наиболее близким по технической сущности способом, выбранным в качестве прототипа, является способ контроля и управления интеллектуальной сетью (см. Стеклов В.К., Беркман Л.Н. Оценка объема управляющей информации в информационных сетях // Электросвязь. - 2000. - №6), основанный на поддержании требуемой точности параметров сети, находящейся под влиянием внешних воздействий стохастической природы (инвариантность), и объединяющий замкнутую адаптивную и разомкнутую инвариантную системы, в которых измеряют координаты процесса

вырабатывают сигналы управления и воздействуют на управляемый процесс и его координаты.
Таким образом, система управления интеллектуальной сетью должна обладать не только возможностью адаптации к изменениям режима функционирования, но и свойством инвариантности, позволяющим системе быть нечувствительной к случайным возмущающим воздействиям, то есть иметь комбинированную структуру, которая объединяет адаптивную (замкнутую) и инвариантную (разомкнутую) системы.
Недостатком данного способа управления является то, что в процессе выработки управляющего воздействия постоянно используется вся доступная измерению информация, что в распределенной системе не только перенасыщает каналы связи и управления транзитными потоками информации, но и приводит к тому, что в процессе функционирования сети все измерительные средства находятся под напряжением.
Кроме того, в системе отсутствует контур управления, связанный с воздействием на источник возмущений, что может приводить к постоянным блокировкам сети (блокировкам совмещения).
Раскрытие изобретения
Задачей изобретения является сокращение объемов циркулирующей по распределенной системе управляющей информации и повышение помехоустойчивости системы управления.
Технический результат
Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к сокращению объемов циркулирующей по распределенной системе управляющей информации и повышению помехоустойчивости системы управления.
Технический результат достигается с помощью способа автоматического контроля и адаптивного управления распределенной системой, находящейся под воздействием случайных возмущений, основанного на измерении вектора переменных состояний

который после преобразования сравнивается с порогом, вырабатываемым в блоке формирования пороговых значений с учетом априорных сведений о состоянии системы, при этом если полученная после преобразования величина измеренного параметра превышает пороговое значение, то принимается решение о неработоспособности системы и вырабатывается управляющий сигнал на поддержание заданного режима функционирования, причем решение о работоспособности системы принимается на основе анализа всей доступной измерению информации, при этом вектор переменных состояний

разбивают на две системы признаков

и

а контроль системы осуществляется в два этапа, причем на первом этапе используют локальную информацию о состоянии каждого узла по которой обнаруживают путем сравнения с порогом нарушение заданного режима функционирования, а втором этапе определяют тип нарушения путем измерения всей доступной измерению информации, при этом признаки  после преобразования сравнивают с порогом y0, и если величина не превышает порог y0, то принимается решение о работоспособности системы, в противном случае фиксируется действительно неработоспособное состояние системы и вырабатывается управляющий сигнал на применение мер воздействия на распределенную систему и источник случайных возмущений. Благодаря введению двухэтапного принципа контроля состояния распределенной системы удается в значительной мере сократить обмен циркулирующей информации, поскольку на первом этапе используется в основном локальная информация о состоянии подсистемы.
после преобразования сравнивают с порогом y0, и если величина не превышает порог y0, то принимается решение о работоспособности системы, в противном случае фиксируется действительно неработоспособное состояние системы и вырабатывается управляющий сигнал на применение мер воздействия на распределенную систему и источник случайных возмущений. Благодаря введению двухэтапного принципа контроля состояния распределенной системы удается в значительной мере сократить обмен циркулирующей информации, поскольку на первом этапе используется в основном локальная информация о состоянии подсистемы.
Контур управления, связанный с воздействием на источник возмещения, на основе анализа помехи, необходим для предотвращения внутренних блокировок, и степень этого воздействия определяется в результате решения второй обратной задачи идентификации - идентификации возмущений и помех и мест их локализации.
Технический результат устройства, осуществляющего способ автоматического контроля и адаптивного управления распределенной системой, содержащего распределенную систему, связанную с источником случайных возмущений, первый блок измерений, соединенный входом с выходом распределенной системы, а выходом с первым входом блока идентификации, выход которого соединен с входом блока регистрации и управления, соединенного своим выходом с входом распределенной системы, достигается введением в него второго блока измерений, выход которого подсоединен к второму входу блока идентификации, третий вход которого соединен с шиной выдачи априорных сведений, второй блок измерений связан с шиной взаимодействия подсистем, при этом выход блока регистрации и управления подключен к источнику случайных возмущений.
Блок идентификации устройства автоматического контроля и управления распределенной системой содержит блок преобразования признаков  , один вход которого соединен с выходом первого блока измерений, а выход подключен к первому входу первого блока сравнения, блоки преобразования признаков , соединенных первыми входами с измерительной шиной второго блока измерений, а выходами - с первым входом сумматора, выход которого подключен к первому входу второго блока сравнения, блок формирования пороговых значений, информационные выходы которого подсоединены к вторым входам первого и второго блоков сравнения, выходы которых соединены с входами установки в единицу первого и второго RS-триггеров, соответственно, входы установки в ноль которых подсоединены к управляющему входу блока формирования пороговых значений, генератор искусственного трафика, вход которого связан с одним выходом блока управления, выход которого подключен к управляющему входу блока формирования пороговых значений и к первому выходу блока регистрации и управления, связанного с выходом блока идентификации, первый, второй и третий элементы И, первые входы которых соединены с выходом генератора искусственного трафика и с другим входом блока преобразования признаков , прямой выход первого триггера соединен со вторым входом третьего элемента И и вторым входом блока регистрации и управления, а инверсный выход - со вторыми входами первого и второго элементов И и вторыми входами блоков преобразования признаков , при этом прямой выход второго триггера соединен с третьим входом элемента И, а инверсный выход подсоединен к третьему входу первого элемента И, выход которого подсоединен к одному из входов элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход - с третьим входом блока регистрации и управления, четвертый вход которого соединен с выходом третьего элемента И, кроме того, блок формирования пороговых значений соединен с шиной выдачи априорных сведений.
, один вход которого соединен с выходом первого блока измерений, а выход подключен к первому входу первого блока сравнения, блоки преобразования признаков , соединенных первыми входами с измерительной шиной второго блока измерений, а выходами - с первым входом сумматора, выход которого подключен к первому входу второго блока сравнения, блок формирования пороговых значений, информационные выходы которого подсоединены к вторым входам первого и второго блоков сравнения, выходы которых соединены с входами установки в единицу первого и второго RS-триггеров, соответственно, входы установки в ноль которых подсоединены к управляющему входу блока формирования пороговых значений, генератор искусственного трафика, вход которого связан с одним выходом блока управления, выход которого подключен к управляющему входу блока формирования пороговых значений и к первому выходу блока регистрации и управления, связанного с выходом блока идентификации, первый, второй и третий элементы И, первые входы которых соединены с выходом генератора искусственного трафика и с другим входом блока преобразования признаков , прямой выход первого триггера соединен со вторым входом третьего элемента И и вторым входом блока регистрации и управления, а инверсный выход - со вторыми входами первого и второго элементов И и вторыми входами блоков преобразования признаков , при этом прямой выход второго триггера соединен с третьим входом элемента И, а инверсный выход подсоединен к третьему входу первого элемента И, выход которого подсоединен к одному из входов элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход - с третьим входом блока регистрации и управления, четвертый вход которого соединен с выходом третьего элемента И, кроме того, блок формирования пороговых значений соединен с шиной выдачи априорных сведений.
Поскольку реализация способа осуществляется с применением методов статистической теории распознавания образов и статистической теории принятия решений, то критерием качества является суммарная ошибка классификации (сумма ошибок первого и второго рода), которые возникают на первом и втором этапе контроля. Это обстоятельство использовано при построении блока идентификации, в котором при формировании порогов используются априорные сведения (шина 10) о состоянии системы при нормальном функционировании и при возникновении аномалий. Эти состояния моделируются при формировании пороговых значений х0 и y0 в блоке формирования пороговых значений 18 с помощью генератора искусственного трафика 21 в процессе обучения.
Краткое описание чертежей
На фиг.1 показана структурная схема, осуществляющая способ автоматического контроля и адаптивного управления распределенной системой.
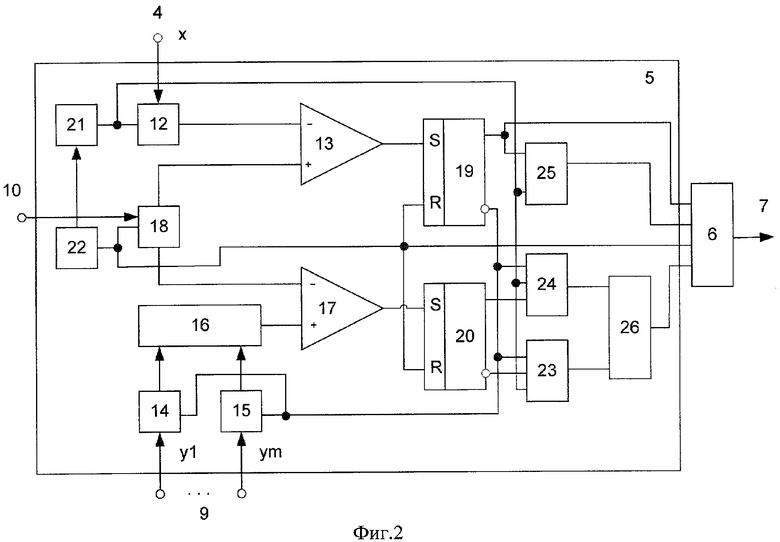
На фиг.2 представлена функциональная схема блока принятия решения (устройства идентификации).
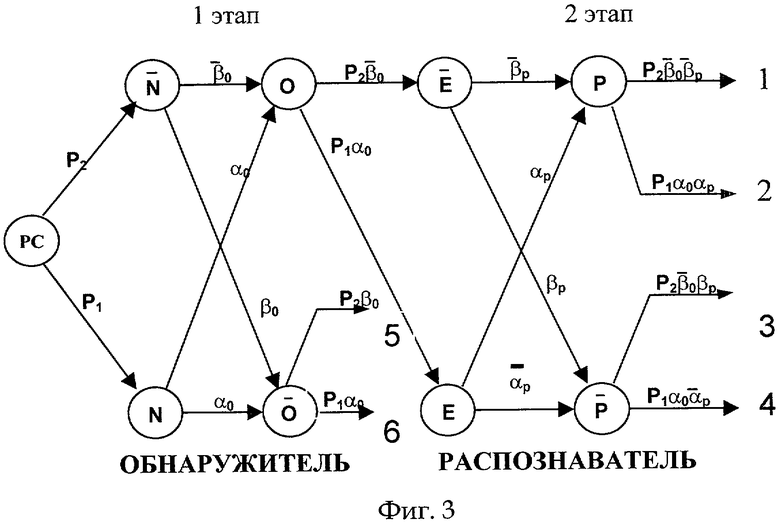
На фиг.3 изображен граф распознавания работоспособности телекоммуникационной системы, реализующий двухэтапный принцип принятия решения.
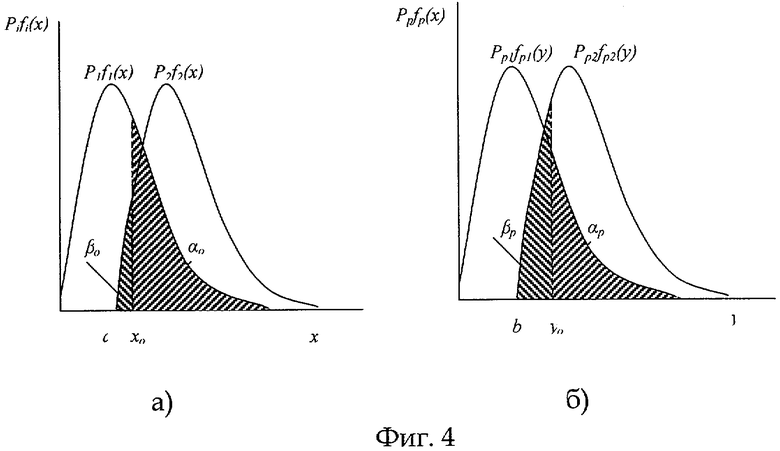
На фиг.4 представлены кривые плотностей распределения признаков в соответствии с критерием Неймана-Пирсона (для простоты - закона распределения Релея).
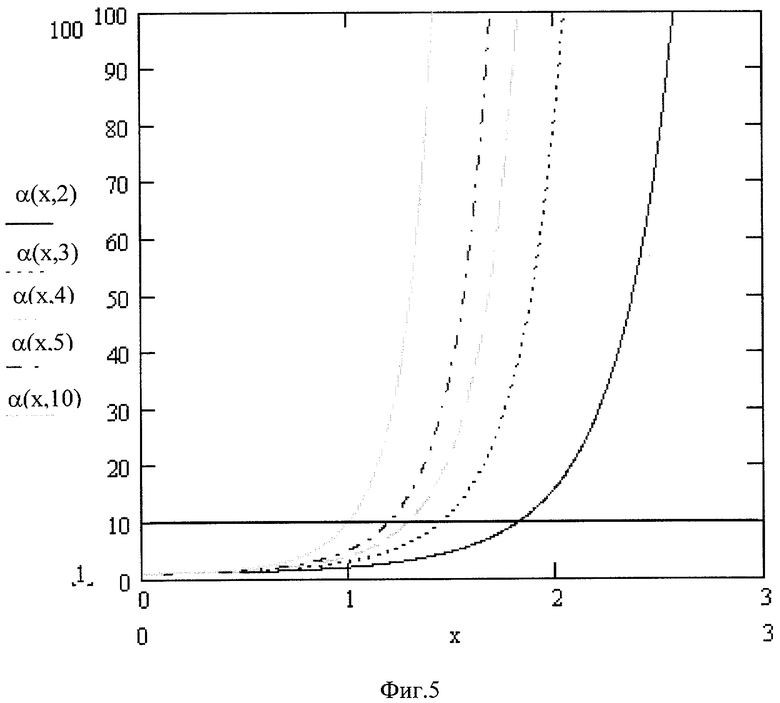
На фиг.5 изображены графики зависимости сокращения объема информации за счет использования двухэтапной процедуры контроля.
Осуществление изобретения
Способ автоматического контроля и управления распределенной системой, находящейся под воздействием случайных возмущений основан на измерении вектора переменных состояний

который после преобразования сравнивается с порогом, вырабатываемым в блоке формирования пороговых значений с учетом априорных сведений о состоянии системы, при этом если полученная после преобразования величина измеренного параметра превышает пороговое значение, то принимается решение о неработоспособности системы и вырабатывается управляющий сигнал на поддержание заданного режима функционирования, причем решение о работоспособности системы принимается на основе анализа всей доступной измерению информации, при этом вектор переменных состояний

разбивают на две системы признаков

и

а контроль системы осуществляется в два этапа, причем на первом этапе используют локальную информацию о состоянии каждого узла, по которой обнаруживают путем сравнения с порогом нарушение заданного режима функционирования, а на втором этапе определяют тип нарушения путем измерения всей доступной измерению информации, при этом признаки после преобразования сравнивают с порогом y0, и если величина не превышает порог y0, то принимается решение о работоспособности системы, в противном случае фиксируется действительно неработоспособное состояние системы и вырабатывается управляющий сигнал на применение мер воздействия на распределенную систему и источник случайных возмущений.
Устройство автоматического контроля и адаптивного управления распределенной системой содержит распределенную систему (1), связанную с источником случайных возмущений (2), первый блок измерений (3), соединенный входом с выходом распределенной системы (2), а выходом (4) с первым входом блока идентификации (5), выход которого соединен с входом блока регистрации и управления (6), соединенного своим выходом (7) с входом распределенной системы (1), при этом второй блок измерений (8), выход которого (9) подсоединен к второму входу блока идентификации (5), третий вход которого соединен с шиной (10) выдачи априорных сведений, связан с шиной взаимодействия (11) подсистем, при этом выход (7) блока регистрации и управления (6) подключен к источнику случайных возмущений (2).
В данном изобретении предлагается устройство автоматического контроля и адаптивного управления распределенной системой, в которой блок идентификации (5) содержит блок преобразования признаков (12), один вход которого соединен с выходом (4) первого блока измерений (3), а выход подключен к первому входу первого блока сравнения (13), блоки преобразования признаков (14, 15), соединенные первыми входами к измерительной шине (9) второго блока измерений (8), а выходами - к первым входам сумматора (16), выход которого подключен к первому входу второго блока сравнения (17), блок формирования пороговых значений (18), информационные выходы которого подсоединены к вторым входам первого и второго блоков сравнения (13, 17), выходы которых соединены с входами установки в единицу первого и второго (19, 20) RS-триггеров, соответственно, входы установки в ноль которых подсоединены к управляющему входу блока формирования пороговых значений (18), генератор искусственного трафика (21), вход которого связан с одним выходом блока управления (22), выход которого подключен к управляющему входу блока формирования пороговых значений и к первому выходу блока регистрации и управления (6), связанного с выходом блока 7, первый, второй и третий элементы И (23, 24, 25), первые входы которых соединены с выходом генератора искусственного трафика (21) и с другим входом блока преобразования признаков (12), прямой выход первого триггера 19 соединен с вторым входом третьего элемента И (25) и вторым входом блока регистрации и управления 6, а инверсный выход - с вторыми входами первого и второго элементов И (23, 24) и вторыми входами блоков преобразования признаков , при этом прямой выход второго триггера 20 соединен с третьим входом элемента И (24), а инверсный выход подсоединен к третьему входу первого элемента И (23), выход которого подсоединен к одному из входов элемента ИЛИ (26), другой вход которого соединен с выходом второго элемента И (24), а выход - с третьим входом блока регистрации и управления 6, четвертый вход которого соединен с выходом третьего элемента И (25), кроме того блок формирования пороговых значений (18) соединен с шиной выдачи априорных сведений 10.
Специфика построения устройства автоматического контроля и адаптивного управления распределения системой такова, что блок 1, обозначенный в схеме фиг.1 как распределенная система, может представлять собой отдельную подсистему (коммутационный узел, глобальной телекоммуникационной системы), при этом в данном случае организуются локальные контура управления в каждой подсистеме. Объединяющим элементом является обозначенная в схеме шина 11 взаимодействия подсистем, которая позволяет обмениваться информацией, необходимой для принятия достаточного обоснованного решения, с соседними узлами при распределенном адаптивном управлении, либо с центром управления - при централизованном управлении. Это оправдывает название изобретения, которое связано с территориальной рассредоточенностью ресурсов сети связи.
Способ осуществляют следующим образом. При коллективном использовании ресурсов в распределенной на огромной территории глобальной телекоммуникационной системе их невозможно распределить по запросам без дополнительных усилий, поскольку конкурирующие за ресурс требования не могут самостоятельно организоваться в согласованную очередь. Возникает самостоятельная задача распределенного управления, требующая преодоления трудностей при попытке создания централизованной системы управления из-за неизбежно возникающих задержек. Проблемы, связанные с маршрутизацией в области распределенного управления, преодолеваются путем использования распределенной адаптивной маршрутизации. Маршруты формируются по мере необходимости в соответствии с текущим состоянием системы. По системе передаются управляющие пакеты корректировки маршрутизации о текущих длинах очередей и возникающих перегрузках. Этим пакетам присваивается низкий приоритет при распределении вычислительной мощности, что не всегда оправдано. Реально эти потоки пакетов корректировки используют те же дорогостоящие ресурсы системы и дополнительно ее перегружают. Вместо периодической корректировки предлагается ряд методов апериодической корректировки, при которой эти пакеты отправляются только в том случае, когда параметры состояния системы превысят определенные пороговые значения, а также ряд процедур, вырабатывающих решения о маршрутизации на основе локальной информации о длинах очередей в конкретном узле с учетом знания текущей топологии и автоматическим отслеживанием изменений конфигурации телекоммуникационной системы, то есть, создавая локальные контуры управления.
Фактически такая процедура реализует двухэтапный принцип принятия решения, переходя к децентрализованному способу контроля и управления распределенными глобальными телекоммуникационными системами.
При этом блок идентификации состояния телекоммуникационной системы работает в трех режимах: текущего контроля, оценки ошибок контроля и обучения.
Примеры конкретного осуществления способа автоматического контроля и адаптивного управления распределенной системой
Пример работы блока идентификации в режиме текущего контроля. В режиме контроля состояния телекоммуникационной системы блок управления отключает генератор искусственного трафика. На первом этапе проверки правильности функционирования телекоммуникационной системы по обобщенному параметру 6 его измеренное значение вводится в блок преобразования 12. В этом блоке производится преобразование в соответствии с выражением
где Λ(x) - отношение правдоподобия.
В блоке сравнения 13 происходит сравнение величины  с пороговым значением x0, сформированным в блоке формирования пороговых значений 18. Если Λ(x)>x0, т.е. нарушение режима работы не обнаружено, сигнал с выхода первого блока сравнения поступает в блок регистрации и управления 6 и фиксируется нормальное (N) работоспособное состояние телекоммуникационной системы. В противном случае (если Λ(x)<x0) фиксируется аномальное
с пороговым значением x0, сформированным в блоке формирования пороговых значений 18. Если Λ(x)>x0, т.е. нарушение режима работы не обнаружено, сигнал с выхода первого блока сравнения поступает в блок регистрации и управления 6 и фиксируется нормальное (N) работоспособное состояние телекоммуникационной системы. В противном случае (если Λ(x)<x0) фиксируется аномальное  состояние системы и производится более достоверная оценка ее состояния путем исследования набора признаков yi, поступающих с выхода системы 9, где
состояние системы и производится более достоверная оценка ее состояния путем исследования набора признаков yi, поступающих с выхода системы 9, где 
Значения измеренных признаков поступают в блоки преобразования 14, 15, в которых формируются величины
в дальнейшем суммируемые в блоке 16.
В блоке сравнения 17 полученная сумма сравнивается с порогом у о, вырабатываемым в блоке формирования 18.
В случае, когда
сигнал о работоспособности телекоммуникационной системы поступает на первый вход элемента И1 23. Если
то сигнал подается на вход второго элемента И 24. Так как со второго выхода блока 26 на входы элементов И 23 и И 24 поступает высокий потенциал, то сигнал с элемента И 24 передается непосредственно, а с элемента И 23 - через элемент ИЛИ 26 в блок регистрации 6. В первом случае фиксируется экстремальная ситуация, во втором - регистрируется нормальное функционирование телекоммуникационной системы.
Пример работы блока идентификации в режиме оценки ошибок контроля. При оценке ошибок контроля блок управления 22 включает генератор искусственного трафика 21, который моделирует нормальное N и аномальное  состояние телекоммуникационной системы в соответствии с априорными вероятностями
состояние телекоммуникационной системы в соответствии с априорными вероятностями

В зависимости от величины порога x0, устанавливаемого в блоке формирования 18 и реализацией случайной величины Λ(x), принимаются решения о состоянии телекоммуникационной системы. Если значение Λ(x)>x0, с выхода блока сравнения 16 сигнал поступает на первый вход элемента И 23. Если исходным является аномальное состояние системы , то с первого выхода блока генератора искусственного трафика 21 сигнал подается на другой вход элемента И 24 и через элемент ИЛИ 26 сигнал, соответствующий "необнаруженному" нарушению состояния системы -  (отказ не обнаружен) и обусловленный статистическими свойствами трафика и ошибками обнаружителя, передается в блок регистрации 6.
(отказ не обнаружен) и обусловленный статистическими свойствами трафика и ошибками обнаружителя, передается в блок регистрации 6.
В случае фиксации обнаружителем нарушения режима работы телекоммуникационной системы - О (отказ обнаружен) сигнал передается на вход элемента И 23 (через блоки 14, 15 сумматор 16 и блок сравнения 20), на выходе которого появляется импульс, соответствующий трем событиям, когда обнаружитель фиксирует нарушение - О при нормальном функционировании сети - N, но из-за ошибок контроля распознаватель отнес его к состоянию блокировки. На выходе элемента И 23 появляется импульс, соответствующий событиям, когда обнаружитель правильно зафиксировал нарушение - , а распознаватель классифицировал нормальное состояние системы. Импульсы с выходов элементов И 23, И 24, И 25 всегда передаются в блок регистрации 6, в котором при достаточно большом числе испытаний формируются вероятности "ложного" состояния  и суммарного, обусловленного обнаружителем и распознавателем "не обнаруживаемого" экстремального состояния телекоммуникационной системы:
и суммарного, обусловленного обнаружителем и распознавателем "не обнаруживаемого" экстремального состояния телекоммуникационной системы: 
Пример работы блока идентификации в режиме обучения.
В режиме обучения в связи с двухэтапным принципом работы, предусматривающим включение распознавателя по сигналу с обнаружителя, происходит уменьшение Рл за счет увеличения Рн. При оптимизации суммарной величины  где 0≤γ≤1, неопределенный множитель Лагранжа, уменьшение второго слагаемого может быть достигнуто за счет оптимального выбора порогов
где 0≤γ≤1, неопределенный множитель Лагранжа, уменьшение второго слагаемого может быть достигнуто за счет оптимального выбора порогов  При этом уменьшение значений x0, y0 производится за n испытаний путем уточнения (n-1) испытания x0(n-1), y0(n-1) за счет
При этом уменьшение значений x0, y0 производится за n испытаний путем уточнения (n-1) испытания x0(n-1), y0(n-1) за счет  известными методами, например методом стохастической аппроксимации, осуществляемым блоком 18 формирования пороговых значений. Знак приращения определяется наличием сигнала на выходах элемента И 24, либо ИЛИ 26.
известными методами, например методом стохастической аппроксимации, осуществляемым блоком 18 формирования пороговых значений. Знак приращения определяется наличием сигнала на выходах элемента И 24, либо ИЛИ 26.
Пример расчета оптимального значения порогов классификации, обеспечивающих минимальную ошибку идентификации состояния телекоммуникационной системы.
При эксплуатации телекоммуникационных систем, работоспособность которых характеризуется большим числом параметров, контроль их технического состояния целесообразно осуществлять в два этапа. На первом этапе по какому-либо обобщенному показателю проводят проверку телекоммуникационной системы на работоспособность и в случае обнаружения аномальной ситуации на втором этапе в результате более тщательного контроля судят о ее действительном состоянии. Такая процедура контроля приводит к значительному сокращению времени проверок и объемов циркулирующей по сети измерительной информации.
Однако в том случае, когда обнаружитель и распознаватель - так для краткости назовем устройства идентификации состояния телекоммуникационной системы соответственно на первом и втором этапах - допускают ошибки первого (αo, αp) и второго (βo, βр) рода, становится актуальным вопрос выбора порогов при классификации состояния системы на наличие экстремальной ситуации (E) и ее отсутствие 
Поскольку

из графа на фиг.3 получаются выражения для вероятности "ложного" Рл и "необнаруженного" Рн состояния блокировки телекоммуникационной системы при двухэтапной процедуре выявления состояния блокировок:

где P1=1-P2 - априорная вероятность возникновения экстремальной ситуации в системе.
В соответствии с критерием Неймана-Пирсона потребуем минимума Pн при условии Рл=const=с:
С учетом приведенных на фиг.4 а) кривых плотностей распределения признака х при нормальном состоянии телекоммуникационной системы  и
и  - при ее аномальном состоянии, запишем:
- при ее аномальном состоянии, запишем:

Аналогичная картина плотностей вероятностей распределения признаков y показана на фиг.4 б), из которой следует:

Условия (1) с учетом (2) и (3) представим в следующем виде:


В том случае, когда на втором этапе распознавание осуществляется по нескольким произвольно распределенным признакам  для нахождения результирующей ошибки распознания можно воспользоваться известными методами.
для нахождения результирующей ошибки распознания можно воспользоваться известными методами.
Так как в данном случае пороги классификации на первом и втором этапах связаны функциональной зависимостью [x0=ϕ(y0)], то в результате дифференцирования по нижнему пределу, получим условие

которое позволяет найти оптимальное значение порогов классификации, обеспечивающих минимальную ошибку идентификации состояния телекоммуникационной системы.
При релеевских законах распределения признаков x и y:

условия (4) и (6) принимают вид:


Продифференцировав по y0 (7) и подставив результат в (8), получим совместное решение уравнений (7), (8) в виде:
Поскольку контролируемым параметром в данном узле является объем буферной памяти, то при этом нет необходимости обмена информацией с другими узлами для его измерения.
Пример сокращения объема информации за счет двухэтапного принципа.
На втором этапе анализу подвергается только та часть информации, которая составляет вероятность ложной тревоги обнаружителя
Значения (11) определяют ту часть общего потока информации, принятой за единицу, которая подлежит анализу на втором этапе. Она определяет непосредственно степень сокращения объема информации, которая должна передаваться от узла к узлу для уточнения типа нарушения. При релеевских законах распределения признаков формула (11) принимает вид:
которая путем несложных преобразований приводится к более компактной форме:
где  - относительная степень пересечения классов по признакам y и x.
- относительная степень пересечения классов по признакам y и x.
Для более наглядной интерпретации результатов приведем зависимость(12) к удобному для графического построения виду:
Кривые зависимости (13) приведены на фиг 1.
В соответствии с критерием Неймана-Пирсона задаемся значением вероятности ложного срабатывания системы контроля С=0.1.
При αсокр.=1, которое достигается при D=0, величина относительного выигрыша становится равной  В данном случае С=1, поэтому нижняя граница αmin=10, что соответствует значениям
В данном случае С=1, поэтому нижняя граница αmin=10, что соответствует значениям

определяемым как координаты точек пересечения кривых с горизонтальной прямой αmin=10, при которых ρmin=1.
Кривые (13) показывают быстрый рост выигрыша в зависимости от степени пересечения классов от одного до десяти в допустимых пределах изменения отношения
при этом выигрыш в отношении сокращения объемов передаваемой информации возможен только при значениях отклонения

Результаты моделирования, иллюстрирующие допустимые пределы изменения D при различных значениях

сведены в таблицу 1.
Таким образом, с ростом относительной степени пересечения классов на обоих этапах наблюдается резкое сокращение объемов передаваемой по сети управляющей информации (от 1 до 10) при изменении значений D от Dmin до Dmax, задаваемых таблицей 1, которая позволяет масштабировать величины С и ρ, при поддержании постоянства отношения  в пределах значений (14).
в пределах значений (14).
Анализ результатов моделирования показывает, что выигрыш в отношении сокращения объема управляющей информации зависит от информативности признаков y распознавания на втором этапе, поскольку информативность признака x на первом этапе оказывается фиксированной и определяется объемом свободного буферного пространства, величина которого может строго контролироваться по локальной информации каждого конкретного узла. Поскольку объем буфера строго дозирован и определяется условием получения оптимальных значений вероятностно-временных характеристик информационного обмена (время задержки, вероятность отказа в обслуживании) [3], по этой причине мы не можем повысить информативность (степень пересечения классов по признаку x - параметр а) признака x. Однако увеличение информативности признаков у связано с измерениями на сети, объем которых определяет качество принятия решения при двухэтапной процедуре. Эти измерения для повышения информативности связаны с необходимостью привлечения дополнительных измерительных ресурсов и естественным увеличением времени анализа. Построение телекоммуникационной системы на основе двухэтапной процедуры принятия решения по сравнению с прототипом и другими известными техническими решениями позволяет обосновать выбор пороговых значений x0, y0, решая данную проблему оптимальным образом в смысле минимума ошибок классификации аномальных состояний системы. При этом классы состояния телекоммуникационной системы, обозначенные на фиг.3 означают:
"1" - система заблокирована, отказ обнаружен и распознан;
"2" - система работоспособна, ложное обнаружение и распознание;
"3" - система заблокирована, отказ обнаружен, но не распознан;
"4" - система работоспособна, ложное обнаружение не распознано;
"5" - система заблокирована, отказ не обнаружен;
"6" - система работоспособна, признано работоспособным.
В технических системах предпочтительнее иметь ошибку первого рода αo (ложный отказ), чем ошибку второго рода βo, (необнаруженный отказ). В связи с чем предпочтительными на фиг.3 будут состояния системы "6" и "1".
Ошибки контроля предлагаемого способа могут быть снижены за счет обучения системы управления путем анализа текущей информации, накапливаемой в процессе функционирования системы, методами статистической теории распознавания образов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450335C1 |
| Способ многоуровневого комплексного контроля технического состояния радиоэлектронных систем | 2018 |
|
RU2694158C1 |
| Устройство для прогнозирования случайных событий | 2019 |
|
RU2705010C1 |
| УСТРОЙСТВО ДЛЯ ПАРАМЕТРИЧЕСКОЙ ОЦЕНКИ ЗАКОНА РАСПРЕДЕЛЕНИЯ ПОТОКОВ СООБЩЕНИЙ | 2020 |
|
RU2750287C1 |
| Способ мониторинга технического состояния строительных объектов с обработкой результатов, характеризующих состояние объекта мониторинга, с использованием мягких измерений | 2016 |
|
RU2650050C1 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ СЛУЧАЙНЫХ СОБЫТИЙ | 2005 |
|
RU2290689C1 |
| СПОСОБ ЛОКАЛЬНОГО ЭЛЕКТРОХИМИЧЕСКОГО ЭКСПРЕСС-АНАЛИЗА МЕТАЛЛИЧЕСКИХ СПЛАВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279067C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СВОБОДНОПЛАВАЮЩИХ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1987 |
|
SU1841026A1 |
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОГО МОНИТОРИНГА СОСТОЯНИЯ ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2024 |
|
RU2841117C1 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ СЛУЧАЙНЫХ СОБЫТИЙ | 2020 |
|
RU2763126C1 |
Использование: в области контроля и управления распределенными системами при проектировании глобальных систем управления территориально распределенных сетей связи. Технический результат заключается в сокращении объемов циркулирующей по распределенной системе управляющей информации и повышении помехоустойчивости системы управления. В способе реализуется двухэтапный принцип принятия решения, переходя к децентрализованному способу контроля и управления распределенными глобальными телекоммуникационными системами. При этом блок идентификации состояния телекоммуникационной системы работает в трех режимах: текущего контроля, оценки ошибок контроля и обучения. 3 н.п. ф-лы, 5 ил., 1 табл.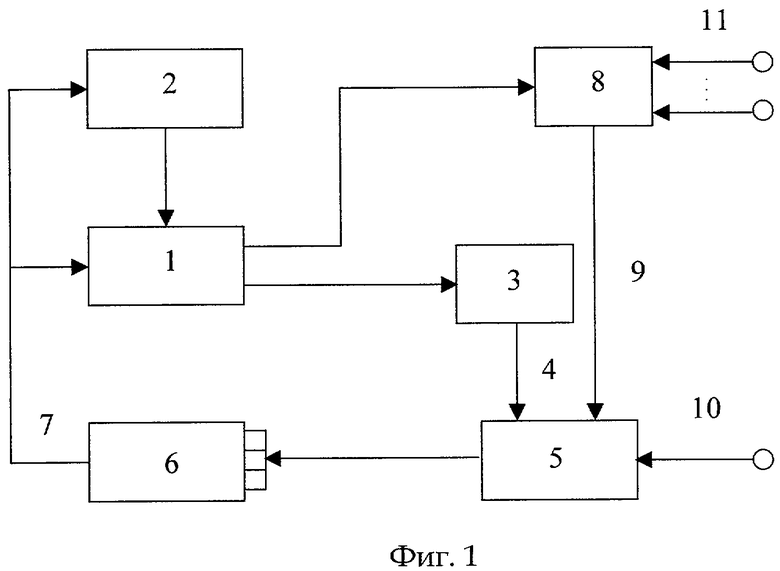
 который после преобразования, состоящего в вычислении отношения правдоподобия, сравнивается с порогом, вырабатываемым в блоке формирования пороговых значений с учетом априорных сведений о состоянии каждого узла системы, при этом, если полученная после преобразования величина измеренного параметра превышает пороговое значение, то принимается решение о неработоспособности данного узла системы и вырабатывается управляющий сигнал на поддержание заданного режима функционирования, причем решение о работоспособности системы принимается на основе анализа всей доступной измерению информации, отличающийся тем, что вектор переменных состояний
который после преобразования, состоящего в вычислении отношения правдоподобия, сравнивается с порогом, вырабатываемым в блоке формирования пороговых значений с учетом априорных сведений о состоянии каждого узла системы, при этом, если полученная после преобразования величина измеренного параметра превышает пороговое значение, то принимается решение о неработоспособности данного узла системы и вырабатывается управляющий сигнал на поддержание заданного режима функционирования, причем решение о работоспособности системы принимается на основе анализа всей доступной измерению информации, отличающийся тем, что вектор переменных состояний  разбивают на две системы признаков
разбивают на две системы признаков  и
и  а контроль системы осуществляется в два этапа, причем на первом этапе используют систему признаков
а контроль системы осуществляется в два этапа, причем на первом этапе используют систему признаков  , содержащую локальную информацию о состоянии данного узла, по которой обнаруживают путем сравнения с порогом х нарушение заданного режима функционирования, а на втором этапе определяют тип нарушения путем измерения признаков
, содержащую локальную информацию о состоянии данного узла, по которой обнаруживают путем сравнения с порогом х нарушение заданного режима функционирования, а на втором этапе определяют тип нарушения путем измерения признаков  , содержащих всю доступную измерению информацию, при этом признаки
, содержащих всю доступную измерению информацию, при этом признаки  после преобразования сравнивают с порогом y0, и если величина не превышает порог y0, то принимается решение о работоспособности системы, в противном случае фиксируется действительно неработоспособное состояние системы и вырабатывается управляющий сигнал на применение мер воздействия на распределенную систему и источник случайных возмущений.
после преобразования сравнивают с порогом y0, и если величина не превышает порог y0, то принимается решение о работоспособности системы, в противном случае фиксируется действительно неработоспособное состояние системы и вырабатывается управляющий сигнал на применение мер воздействия на распределенную систему и источник случайных возмущений. (3), соединенный входом с первым выходом распределенной системы (1), а выходом (4) с первым входом блока идентификации (5), выход которого соединен с входом блока регистрации и управления (6), соединенного своим выходом (7) с входом распределенной системы (1), отличающееся тем, что в него введен второй блок измерений признаков (8), выход которого (9) подсоединен к второму входу блока идентификации (5), третий вход которого соединен с шиной (10) выдачи априорных сведений, по которой поступают заранее известные вероятность нормального функционирования P1 и вероятность возникновения аномальной ситуации P2, второй блок измерений связан с шиной взаимодействия (11) подсистем, выход (7) блока регистрации и управления (6) подключен к источнику случайных возмущений (2), при этом выход блока измерений признаков (8) соединен со вторым выходом распределенной системы (1).
(3), соединенный входом с первым выходом распределенной системы (1), а выходом (4) с первым входом блока идентификации (5), выход которого соединен с входом блока регистрации и управления (6), соединенного своим выходом (7) с входом распределенной системы (1), отличающееся тем, что в него введен второй блок измерений признаков (8), выход которого (9) подсоединен к второму входу блока идентификации (5), третий вход которого соединен с шиной (10) выдачи априорных сведений, по которой поступают заранее известные вероятность нормального функционирования P1 и вероятность возникновения аномальной ситуации P2, второй блок измерений связан с шиной взаимодействия (11) подсистем, выход (7) блока регистрации и управления (6) подключен к источнику случайных возмущений (2), при этом выход блока измерений признаков (8) соединен со вторым выходом распределенной системы (1). (12), осуществляющий преобразование в соответствии с выражением
(12), осуществляющий преобразование в соответствии с выражением
где Λ(x) - отношение правдоподобия,
f(x/N) - условная плотность распределения признаков x при нормальном состоянии телекоммуникационной системы,
 - условная плотность распределения признаков x при аномальном состоянии телекоммуникационной системы,
- условная плотность распределения признаков x при аномальном состоянии телекоммуникационной системы,
один вход которого соединен с выходом (4) первого блока измерений признаков  (3), а выход подключен к первому входу первого блока сравнения (13), блоки преобразования признаков
(3), а выход подключен к первому входу первого блока сравнения (13), блоки преобразования признаков  (14, 15), осуществляющие преобразование в соответствии с выражением
(14, 15), осуществляющие преобразование в соответствии с выражением
где Λ(y) - отношение правдоподобия,
f(y/N) - условная плотность распределения признаков у при нормальном состоянии телекоммуникационной системы,
 - условная плотность распределения признаков у при аномальном состоянии телекоммуникационной системы,
- условная плотность распределения признаков у при аномальном состоянии телекоммуникационной системы,
подсоединенных первыми входами к измерительной шине (9) второго блока измерений признаков (8), а выходами - к входам сумматора (16), выход которого подключен к первому входу второго блока сравнения (17), блок формирования пороговых значений (18), информационные выходы которого подсоединены к вторым входам первого и второго блоков сравнения (13, 17), выходы которых соединены с входами установки в единицу первого и второго (19, 20) RS-триггеров соответственно, входы установки в ноль которых подсоединены к управляющему входу блока формирования пороговых значений (18), генератор искусственного трафика (21), вход которого связан с одним выходом блока управления (22), выход которого подключен к управляющему входу блока формирования пороговых значений и к первому выходу блока регистрации и управления (6), связанного с выходом (7) этого блока, первый, второй и третий элементы И (23, 24, 25), первые входы которых соединены с выходом генератора искусственного трафика (21) и с другим входом блока преобразования признаков  (12), прямой выход первого триггера (19) соединен с вторым входом третьего элемента И (25) и вторым входом блока регистрации и управления (6), а инверсный выход - с вторыми входами первого и второго элементов И (23, 24) и вторыми входами блоков преобразования признаков , при этом прямой выход второго триггера (20) соединен с третьим входом элемента И (24), а инверсный выход подсоединен к третьему входу первого элемента И (23), выход которого подсоединен к одному из входов элемента ИЛИ (26), другой вход которого соединен с выходом второго элемента И (24), а выход - с третьим входом блока регистрации и управления (6), четвертый вход которого соединен с выходом третьего элемента И (25), кроме того, блок формирования пороговых значений (18) соединен с шиной (10) выдачи априорных сведений.
(12), прямой выход первого триггера (19) соединен с вторым входом третьего элемента И (25) и вторым входом блока регистрации и управления (6), а инверсный выход - с вторыми входами первого и второго элементов И (23, 24) и вторыми входами блоков преобразования признаков , при этом прямой выход второго триггера (20) соединен с третьим входом элемента И (24), а инверсный выход подсоединен к третьему входу первого элемента И (23), выход которого подсоединен к одному из входов элемента ИЛИ (26), другой вход которого соединен с выходом второго элемента И (24), а выход - с третьим входом блока регистрации и управления (6), четвертый вход которого соединен с выходом третьего элемента И (25), кроме того, блок формирования пороговых значений (18) соединен с шиной (10) выдачи априорных сведений.
| СТЕКЛОВ В.К | |||
| Оценка объема управляющей информации в информационных сетях, Электросвязь, 2000, №6 | |||
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ ПРИ ВРЕМЕННЫХ ЗАДЕРЖКАХ ИНФОРМАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ | 2001 |
|
RU2192031C1 |
| Устройство для контроля динамических систем | 1978 |
|
SU769496A1 |
| US 6778865 A, 17.08.2004. | |||

