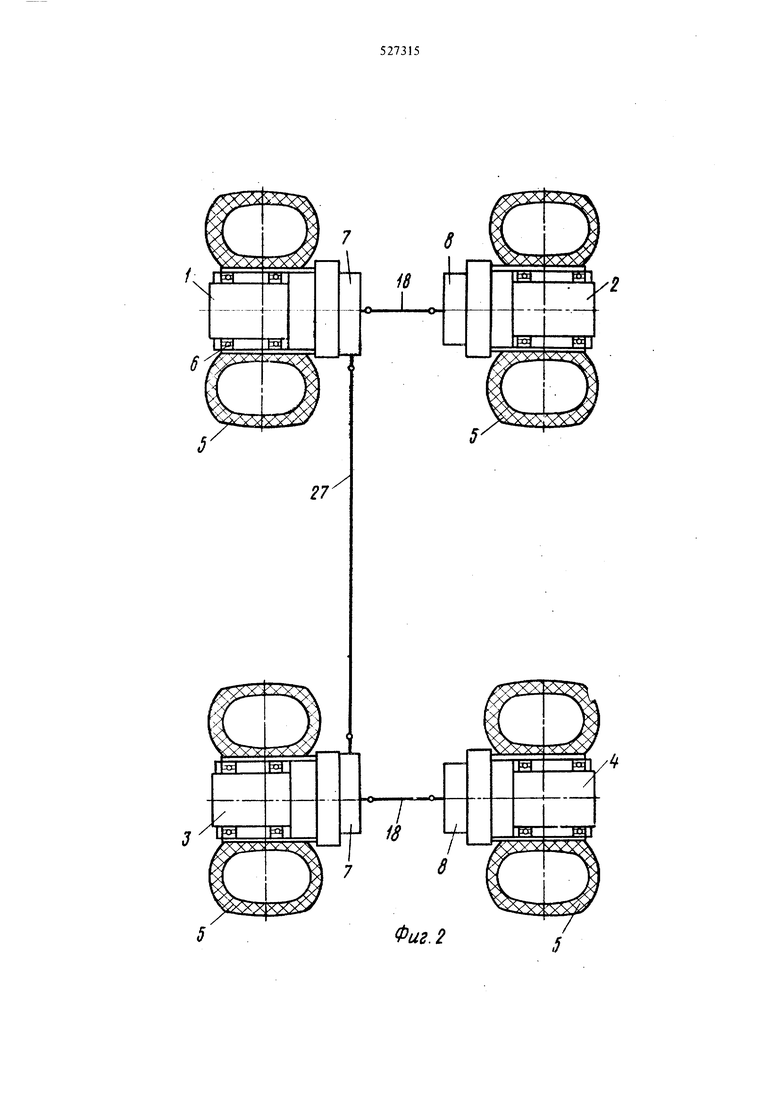
Все узлы и детали трансмиссии скомпонованы в четыре конструкции соответственно числу колес и смонтированы в корпусах 7 и 8.
Корпуса 7 жестко соединены с корпусами электродвигателей 1 и 3, корпуса 8 - с корпусами электродвигателей 2 и 4. В свою очередь, эти корпуса через узел подвески или непосредственно :срепятся к раме (не показано).
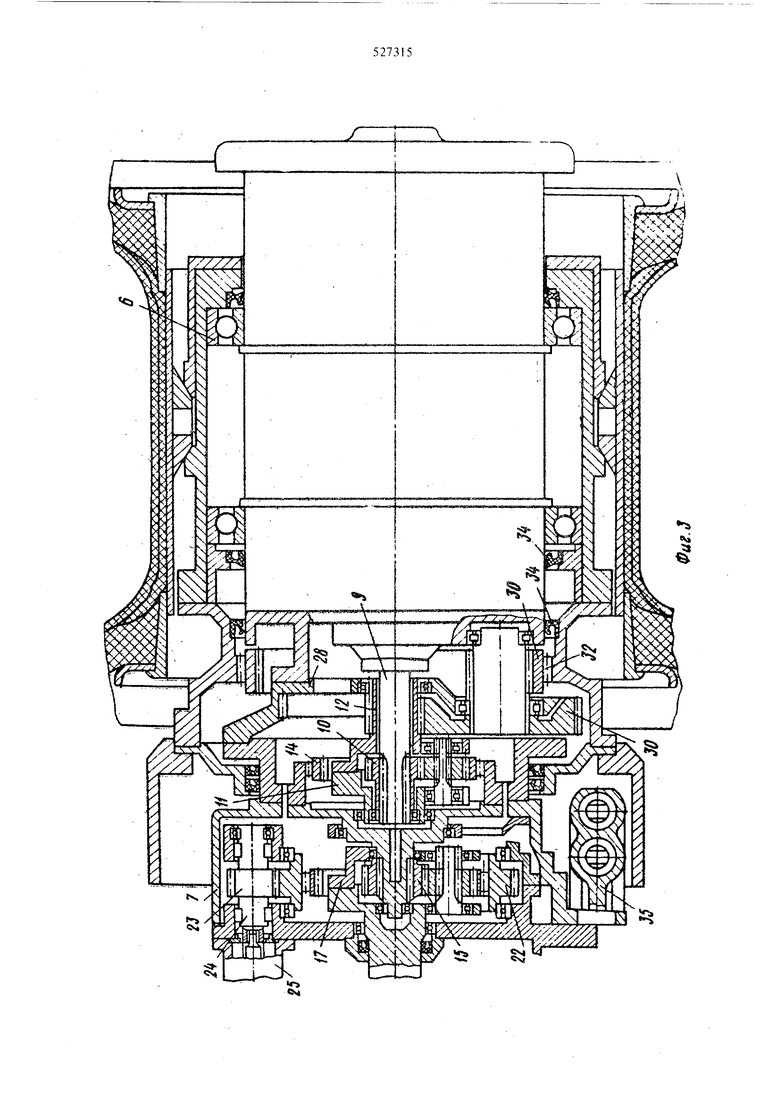
Валы 9 электродвигателей 1-4 соединены с солнечными шестернями 10 трехзвенного дифференциального планетарного механизма.
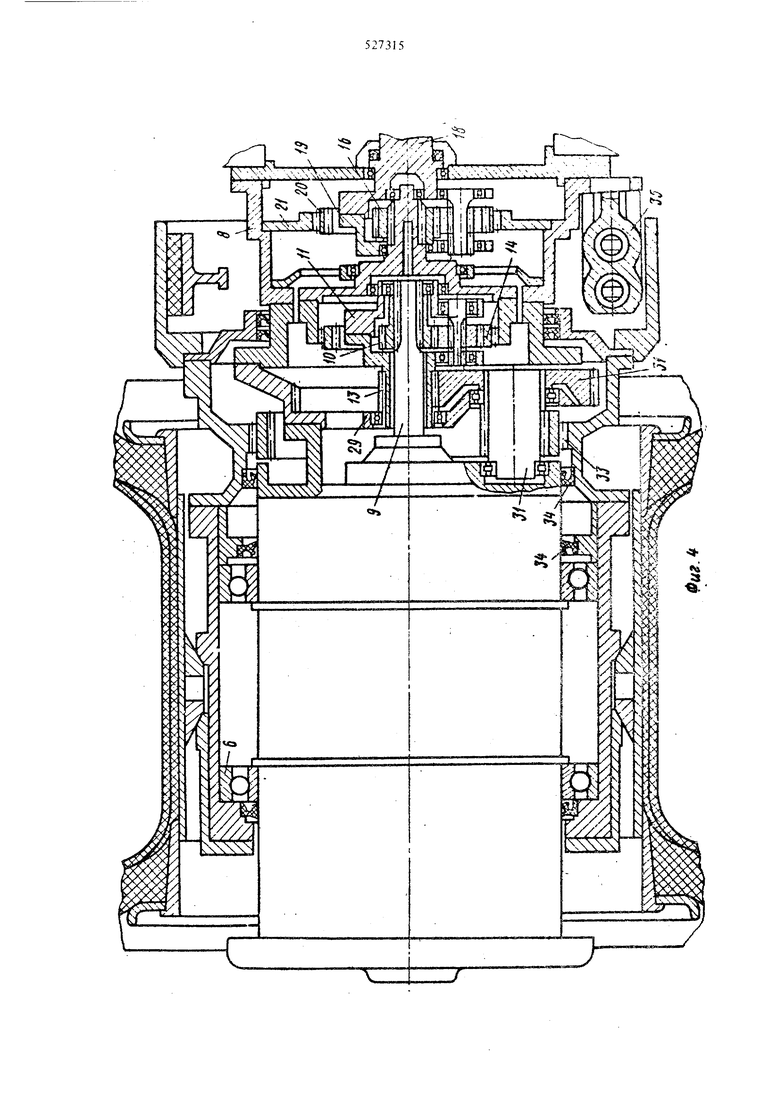
Водила 11 этого механизма жестко соединены с солнечными шестернями 12 и 13 колесных передач. В свою очередь, эпициклические колеса 14 дифференциальных планетарных механизмов жестко через шлицевые муфты соедЕ нены в конструкциях одного борта с солнешыми шестернями 15 межколесно-межосевых планетарных дифференциалов (фиг.З), а в конструкциях другого борта - с солнечными шестернями 16 промежуточных кланетарных передач (фиг. 4).
Водила 17 межколесно-межосевых планетарных дифференциалов механизмов, через кардаш1ые валы 18-соединены с водилами 19 промежуточных планетапных передач. Эпициклические шестерни 20 этих передач через шлицевую . муфту 21 жестко соединены с KopnycaNm 8. Эпициктшческие зубчатые колеса 22 межколесно-межосевых планетарных дифференциалов вьшолнены с двумя зубчатыми BeiDJ,aNffl, причем зубчатьш венец с наружным циклическим зацеплением у колеса 22 зацепляется с шестерней 23. Далее шестерни 23 насажены ня, валы 24 обратимых нерегулируемых гидравлических машин 25 с установленной мошностью 8-10%мощ ности электрической трансмиссии шасси. Гидравлические 25 обоих колес с электродвигателями 1 и 3 соединегш между собой трубопроводами 26. У варианта конструкции, показанного на фиг. 2, нарулшый венец колес 22 вьтолнен коническим, сценляюшимся вместо цш/индрической шестер1ш 23 с коническими шестернями (на фигурах не показано). Эти конические шестерни соединены между собой карданным валом 27.
Гидравлические машины обоих колес, их трубопроводы, передачи, образуемые колесами 22, шестернями 23, представляют собой вариант жесткой связи между межколесно-межосевыми дифференциалами планетарными механизмами для транспортных средств, рамы которых состоят из двух полурам. В свою очередь, если колесо 22 выполнено коническим и сцепляется с ко1шческой шестерней (на фиг. не показана), то конические передачи совместно с карданным валом 27 представляют собой вариант цополнительной жесткой связи для траншортных средств, не предусматривающих смещения ведуших осей относительно друг друга (на фиг. 2).
Водила 28 и 29 колесных передач вьшолнены неподвижными и размешены между шитами тяговых электродвигателей 1-4 и тпитами корпусов 7 и
8 (фиг.З и 4). Сдвоеннь е сатедшиты 30 и .51 колесных передач с одной стороны соединены с солнечными шестернями 12 и 13, а другой - с эпициклическими зубчатыми колесами 32 и 33 соответственно. Последние жестко связаны со ступицами колес 5.
Полости всех четырех конструкций, собранных в корпусах 7 и 8, уплотнены от вытекания смазки манжетными уплотнениями 34. Транспортное средство может также быть снабжено колесными тормозами 35Для самовентиляции тяговых двигателей в корпусах 7 и 8 могут быть предусмотрены каналы для всасьтания вентиляционного воздуха, выброс которого может осушествляться в наружньгх шитах двигателей 1-4.
Передаточные числа колесньзх передач одного из бортов отличаются от передаточных числел колесных передач другого борта на 10-20 %.
Передаточное число передачи, связьшаюшей звенья межколесно-межосевых планетарных дифференциалов между собой, отлично от единицы на 20-30%.
В то же время кинематические параметры разветвляющих планетарных механизмов всех колес, кинематические параметры межколесно-межосевых планетарных дифференциалов, а также передаточные Числа промежуточных планетарных передач равны между собой соответственно.
Согласно описанным выше кинематическим связям при работе трансмиссии скорость движении транспортного средства зависит от алгебраической суммы скоростей тяговых электродвигателей, причем сомножители значений скоростей врашения каждого электродвигателя, являюшяеся: постоянными величинами, зависяшими от передаточных чисел передачи кинематических параметров дифференциальных механизмов и радиусов качения колес, различны и )т еньшаются от 1-го двигателя к 4-му последовательно на 10-30 %.
Подобньш выбор значений передаточных чисел и кинематических параглетров обешечивает при имеющихся кинематических связях и различных вариантах переключения пар полюсов значительное число ступеней регулирования транспортного средства. Например, при использовании двухскоростных тяговых электродвигателей обетёчивается до 30 ступеней регулирования, из которых 16 достигается при положительном направлении вращения всех электродвигателей, а остальные при положительном и отрицательном направлении вращения некоторых электродвигателей.
Действие трансмиссии основано на одновременном последовательном переключении чисел пар полюсов тяговых электродвигателей ручным контроллером или с использованием автоматической системы. В последнем случае переключение осуществляется в зависимости от нагрузки. При этом в тяговом режиме передачи энергии колесам транспортного соепстаа происходит непосредственно от
тягового синхронного генератора к асинхронным электродвигателям 1-4 и от последних несколькими потоками через трехзвенные дифференциальные планетарные механизмы, колесные н промежуточные передачи и межколесно-межосевые дифференциалы к колесам 5 транотортного средства. В зависимости от заданной скорости транспортного средства, а следовательно, при заданном сочетании скоростей и направлений вращения тяговых электродвигателей осуществляется определенная циркуляция мощности между различными элементами кинематической системы, размещенной между валами тяговых электродвигателей 1-4 и колесами 5, характер которой определяется указанным сочетанием. Переключение чисел пар полюсов может осуществляться при постоянных скоростях вращения вала тягового электродвигателя и, следовательно, при постоянной частоте синхронного генератора.
Порядок переключения чисел пар полюсов легко проиллюстрировать на примере использования двухскоростных асинхронных двигателей. Предположим, транспортное средство движется со скоростью, при которой двигатели вращаются в положительном направлении вращения с низкой скоростью. При необходимости увеличения скорости на ближайщую ступень контроллер переключения устанавливает на следующей позиции возможность сохранения для двигателей 1-3 низшей скорости и для двигателя 4 переход на высшз о скорость вращения. Следующая ступень уже предусматртвает включение 1,2 и 4 двигателя на низшей скорости, а двигателя 3 на высщей и т.д. Таким образом, при последовательном приращении скорости до положения, когда все четыре двигателя вращаются с высшей скоростью, происходит до 15 переключений в различных сочетаниях.
Трансмиссия в силу характера дифференциаль ных связей обеспечивает также пропорциональное 5 (в отноше1ши 1:1:2) распределение тяговых усилий по осям и равномерное распределение тяговых усилий по колесам 5 каждой оси независимо от варианта сочетаний скоростей тяговых электродвигателей 1-4.
10Формул аизобретения
Электрическая трансмиссия многоосного транспортного средства, содержащая питаемые от генератора переменного тока многоскоростные асинхронные двигатели, встроенные в ступицу каждого
16 колеса и соединенные посредством трехзвенных дифференциальных планетарных механизмов с ко-, лесными передачами, отличающаяся тем, что, с целью повышения плавности изменения скорости движения транспортного средства, она снабжена
20 межколесно-межосевыми планетарными дифференциалами и промежуточными планетарными передачами, соединяющими межколесно-межосевые планетарнью дифференциалы, связанные с трехэвенными дифференциальными планетарными механизмаМ ми одного борта, с трехзвенными дифференциальными планетарными механизмами противоположного борта, а одновременные свободные звенья дифференциалов соединены между собой жесткой передачей, при этом цередаточные числа колесных
31 передач одного борта отличны от передаточных чисел колесных передач противоположного борта, а передаточное число передачи, связывающей одноименные звенья межколесно-межосевых дифференциалов, отлично от едиш1цы.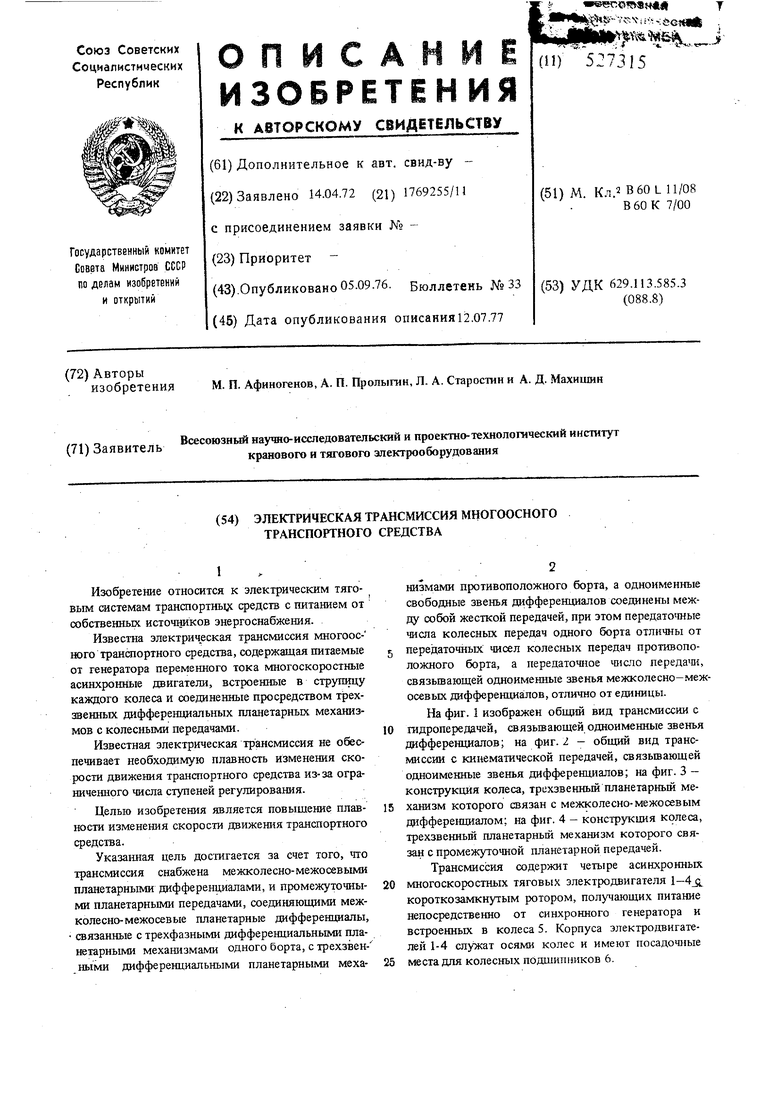
| название | год | авторы | номер документа |
|---|---|---|---|
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2122953C1 |
| МОТОРНО-ТРАНСМИССИОННЫЙ МОДУЛЬ | 2011 |
|
RU2478045C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2149772C1 |
0az.i
Фиг. 2
