На второй вход сумматора 2 поступают импульсы с датчика скорости 4, частота которых пропорциональна скорости где К .вращения: ротора и равна К f коэффициент пропорциональности, зависящий от числа импульсов на один оборот датчика скорости. Частота следования импульсов на выходе сумматора равна f ± Kf где знак + или - означает работу сумматора в режиме суммирования или вычитания и задается внешним сигналом, Так как при суммировании импульсы датчика скорости вклиниваются между импульсами генератора 1 и исчезают с частотой на выходе сумматора 2 появляется неравномерность следования импульсов. Для устранения этого явления после су матора 2 установлен делитель частоты 5 С ростом коэффициента деления делителя неравномерность становится незначительной. Импульсы с делителя частоты 5 посту пают в пересчетную схему б, которая сл жит для преобразования последовательнос импульсов в многофазное прямоугольное напряжение. При этом происходит деление частоты входных импульсов. Частота прямоугольного напряжения, на выходе пересчетной схемы равна , где Kg - коэффициент передачи делителя коэффициент передачи пересчет- ной схемы 6 (зависит от требуемого чис ла фаз выходного напряжения устройства) Выходное напряжение пересчетной схем управляет работой коммутаторов 7, В канале регулирования амплитудой на второй вход сумматора 3 поступают импу сы с управляемого генератора 8, частота которых пропорциональна задаваемой час тоте токов ротора. После сумматора 3 импульсы имеют частоту, равную -f ± К f ,, ; где знак + или - определяется сигналом управлени 3 , в зависимости от режима работы асинхронной машины. Пройдя через делитель 9, установленный с той же целью, что и делитель 5, импульсы преобразуются модулятором Ю в прямоугольное напряжение, амплитуаа которого определяется сигналом управлепо амплитуде LI
(-J , а частота равна
а частота f ±Kf,
кТ
К q -коэффициент
где 9 и 10. передачи элементов
Формула изобретения
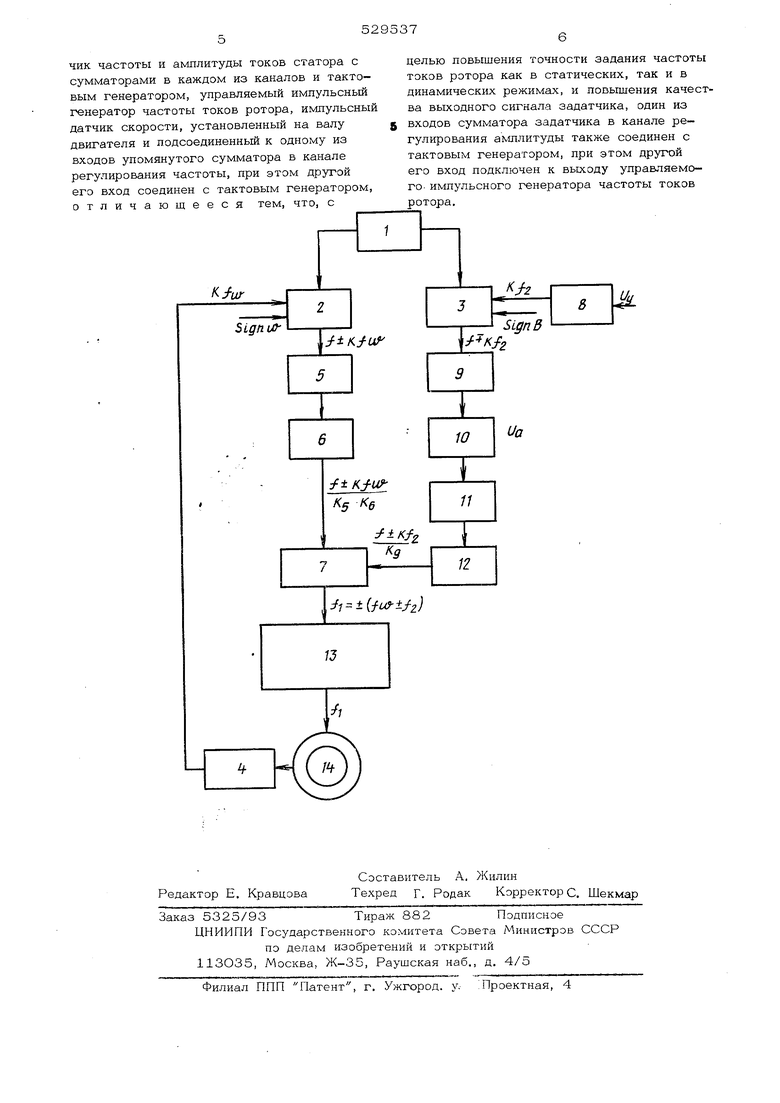
Устройство управления асинхронньЕм короткозамкнутым двигателем, содержащее 60 преобразователь частоты, двухканальный задатВ фильтре 11 прямоугольное напряжение с выхода модулятора 1О преобразовывается в синусоидальное и затем через разделительный трансформатор 12 поступает .для питания коммутаторов 7. Промодулированное выходное напряжение коммутаторов 7 имеет частоту, равную разности частоты канала регулирования по частоте и канала регулирования по амплитуде. Пройдя через фильтры,модулированное напряжение избавляется от высших гармонических и в виде синусоидального сигнала поступает на управление преобразователем частоты 13. Частота сигналов на выходе коммутаторов 7, определяемая как разность частот каналов регулирования по частот е и амплитуде при соответствующем выборе коэффи- циентов (К Kg Kg, сывается: f,. где знак + или - перед скобками определяет направление вращения ротора, а знак перед fj, определяет режим работы асинхрон ной машины 14. Отсюда видно, что частота синусоидального сигнала управления преобразователем частоты не зависит от частоты тактового генератора; а определяется лищь частотой вращения ротора и заданной частотой тока ротора, чем обеспечивается стабильность и точность задания. Частота тактового генератора влияет лишь на число пульсаций в выходном сигнале ком- мутаторов. Но так как частоту пульсаций выбирают большой (4ОО-1ООО Гц), нестабильность частоты тактового генератора практически не сказывается на качестве вы ходного напряжения, Устройство выполнено на полупроводниковых приборах. Частоту тактового генератора выбирают из требуемого диапазона i частоты токов статора и качества управляющих напряжений. При диапазоне выходных частот Гц принято f 4О кГц, Точность задания частоты токов ротора определяется лишь точностью генератора 8, которая в устройстве может составлять 99,3%. Предложенное устройство позволяет обеспечить высокую точность задания частоты токов ротора во всех режимах работ двигателя, а также высокое качество управляющих напря 1сений на входе преобразователя частоты.
чик частоты и амплитуды токов статора с сумматорами в каждом из каналов и тактовым генератором, управляемый импульсный генератор частоты токов ротора, импульсный датчик скорости, установленный на валу двигателя и подсоединенный к одному из входов упомянутого сумматора в канале регулирования частоты, при этом другой его вход соединен с тактовым генератором, отличающееся тем, что, с
целью повышения точности задания частоты токов ротора как в статических, так и в динамических режимах, и повьпления качества выходного сигнала задатчика, один из входов сумматора задатчика в канале регулирования a fflлитyды также соединен с тактовым генератором, при этом другой его вход подключен к выходу управляемого импульсного генератора частоты токов ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| -Фазный задатчик инфранизкой частоты | 1973 |
|
SU601786A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Широкодиапазонный калибратор фазовых сдвигов | 1987 |
|
SU1525614A1 |
| Устройство для настройки и поверки импульсной электроразведочной аппаратуры | 1984 |
|
SU1241177A1 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1980 |
|
SU900397A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Преобразователь напряжения | 1983 |
|
SU1121757A1 |
| Широкодиапазонный калибратор фазовых сигналов | 1984 |
|
SU1226339A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
