(21)i(706330/07
(22)14.06.89
(46) 23.12.91. Бюл. (Т 47 (70 Научно-производственное объединение Росавтоматстром (72) С.И.Алексеев
(53)621.313-333(088.8)
(56)Автооскоэ свидетельстпо СССР if 1309247, кп, Н 02 Р 7/42, 1987.
Авторское свидетельство СССР № 1325656. кл. Н 02 Р 7/42, 1987.
Авторское свидетельство СССР № 1264289, кл. И 02 Р 7/42, 1986.
(54)ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
(57)Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприводам, и предназначено для использования в системах и механизмах общепромышленного назначения с высокими требованиями по надежности и точности стабилизации частоты вращения. Цель изобретения - упрощение и повышение надежности. Указанная мепь достигается -ем, о блок 15 управления инвертором дополнительно снабжен перемножителем 2k напряжений, развертывающим преобразователем 25 напряжений и синусными преобразователями 26-28 нгпряженчй. При этом отсутствует система управления выпрямитепям 3 и упрощается управление инвертором 5 в преобразователе частоты 2 в сравнении с известным решением. 6 ил
га %


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприволам, и предназначено для использования в системах и механизмах общепромышленного назначения с высокими требованиями по надежности и точности стабилизации частоты вращения.
Цель изобретения - упрощение и повышение чя.оежности.
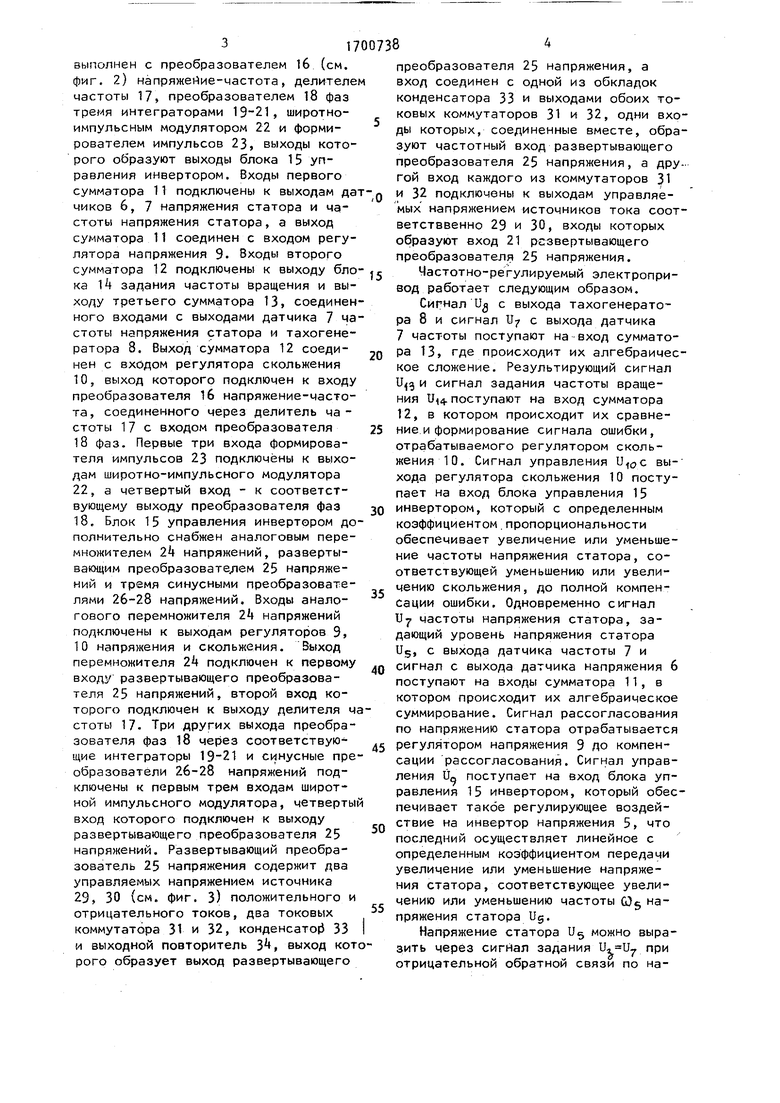
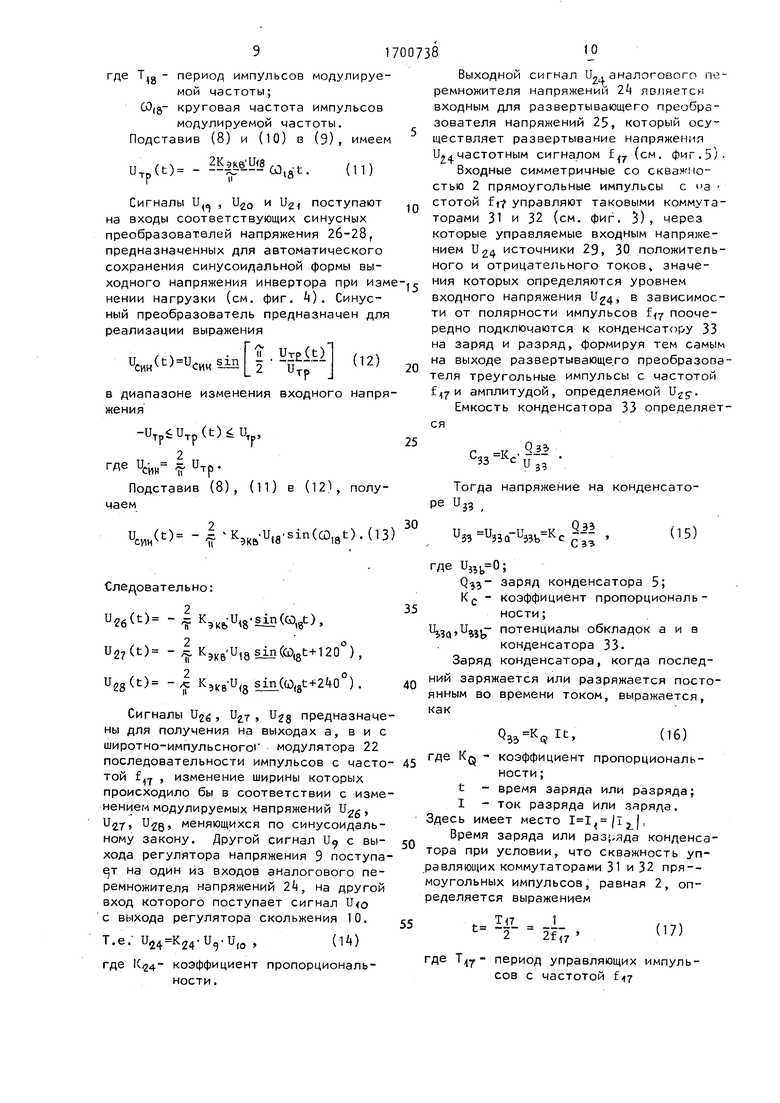
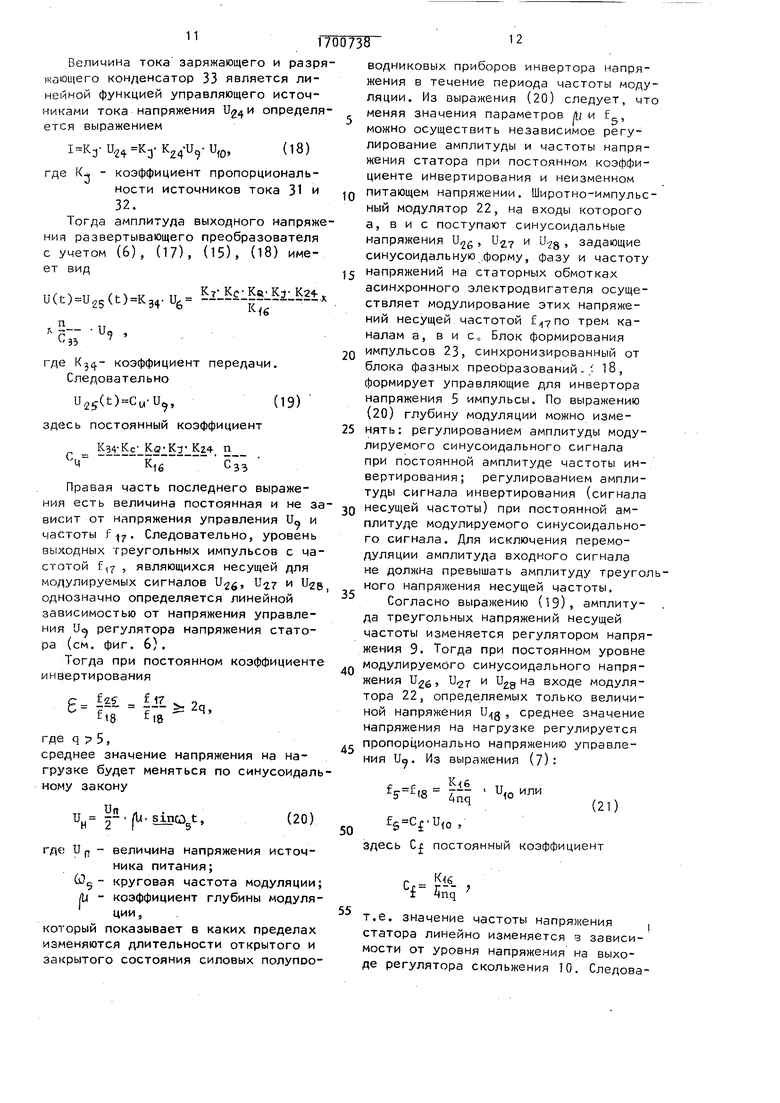
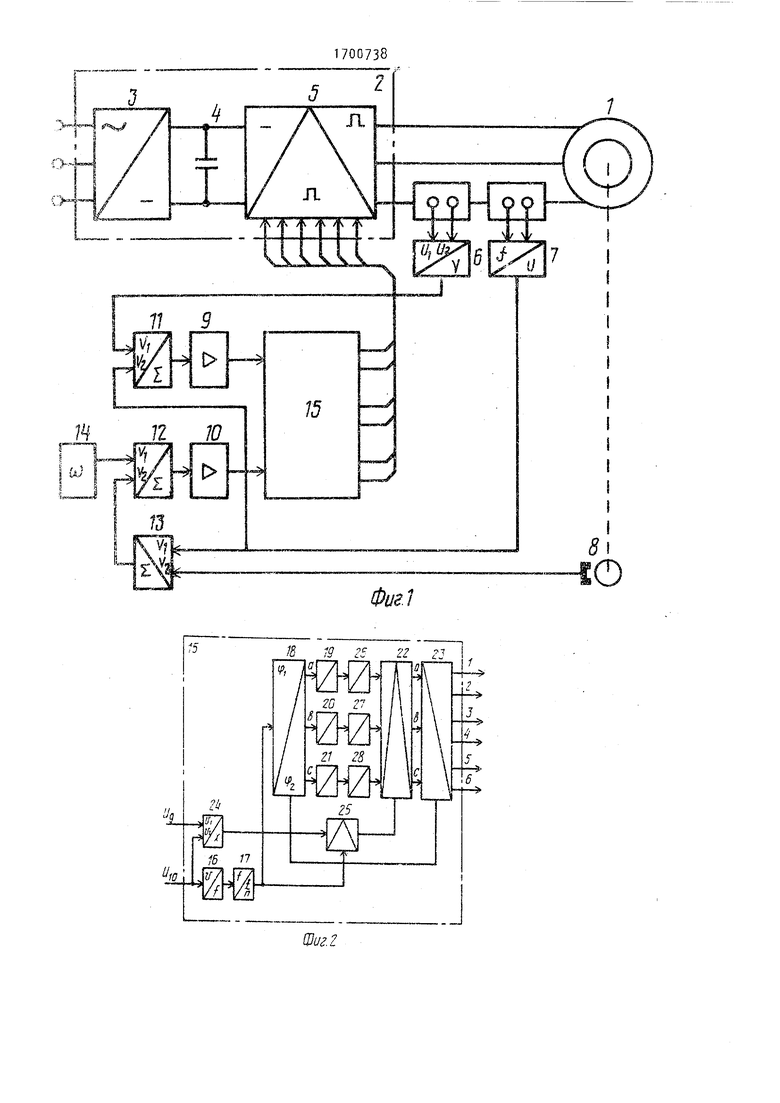
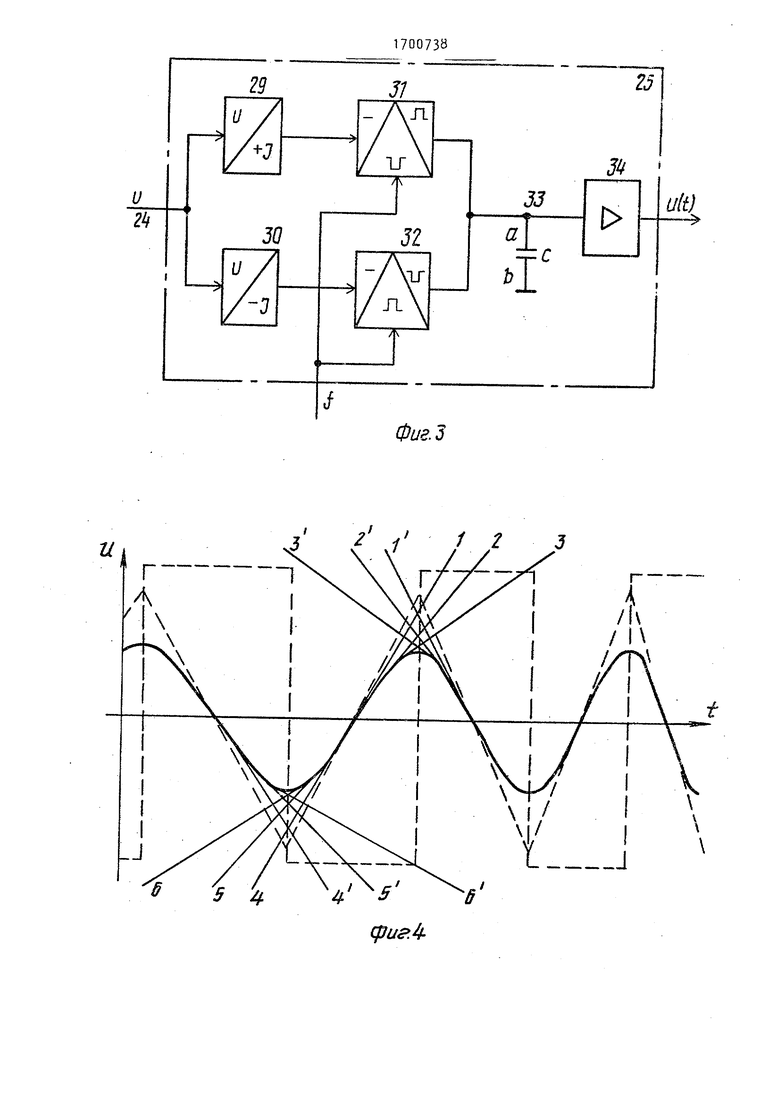
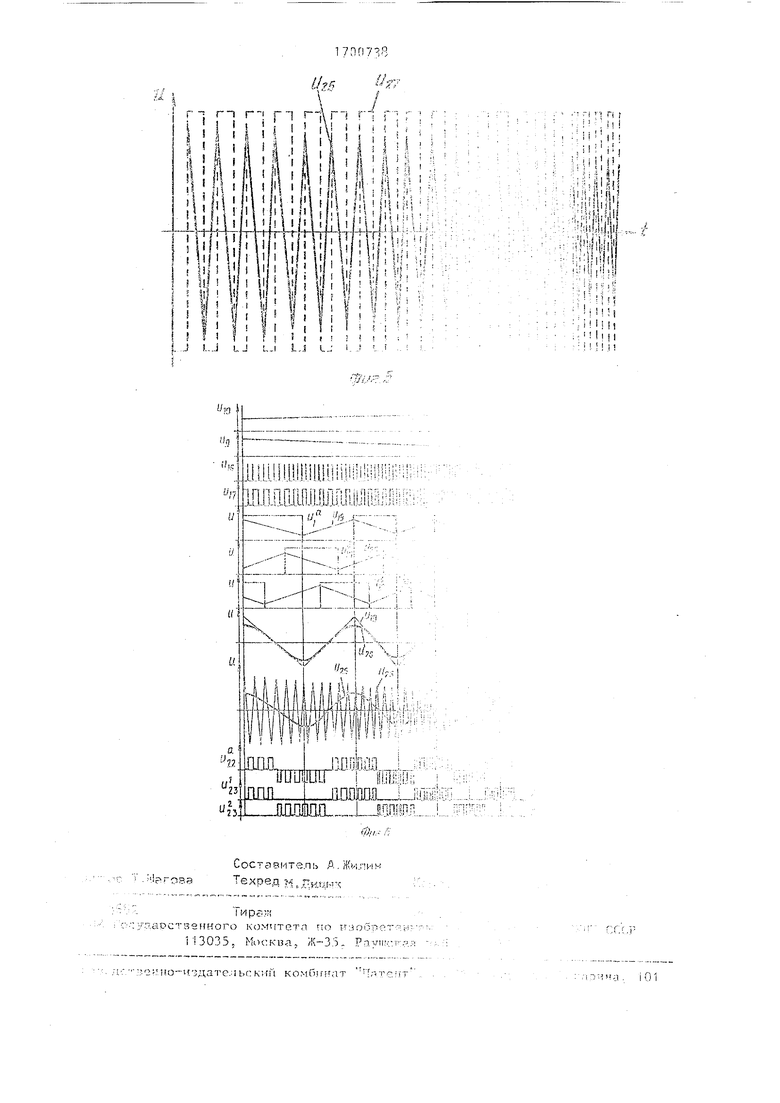
На Лиг, 1 представлена функциональная схема частотно-регулиоуемого электропривода; на йиг. 2 - схема блока упозвления инвестором; на фиг, 3 - схема развеотывающего преобразователя напряжений; на фиг. k - диаграмма работы синусного преобразователя напряжения; на фиг. 5 диаграмме работы развертывающего преобразователя напряжения; на фиг. 6 - диаграмма работы электропривода.
Частотно-регулируемый электропривод содержит асинхронный электродвигатель 1 (см. Фиг. 1), подключенный статорными обмотками к выходам преобразователя иастоты 2, выполненного из последовательно соединенных неуправляемого выпрямителя 3, С-фильт- ра 4 и инвертора 5. датчик 6 напряжения статора, датчик 7 частоты напряжения статора, тахогенератор 8, установленный на валу асинхронного электродвигателя 1 . регулятор напряжения 9, регулятор скольжения 10. три сумматора 11-13,блок 14 задания частоты вращения и блок 15 управления инвертором. Блок 5 управления инвертором
П-и &
СО
ы
выполнен с преобразователем 16 (см. фиг. 2) напряжейие-частота, делителе частоты 17, преобразователем 18 фаз тремя интеграторами , широтно- импульсным модулятором 22 и формирователем импульсов 23, выходы которого образуют выходы блока 15 управления инвертором. Входы первого сумматора 11 подключены к выходам дачиков 6, 7 напряжения статора и частоты напряжения статора, а выход сумматора 11 соединен с входом регулятора напряжения 9. Входы второго сумматора 12 подключены к выходу блока 14 задания частоты вращения и выходу третьего сумматора 13, соединенного входами с выходами датчика 7 частоты напряжения статора и тахогене- ратора 8. Выход сумматора 12 соединен с входом регулятора скольжения 10, выход которого подключен к входу преобразователя 16 напряжение-частота, соединенного через делитель частоты 17 с входом преобразователя 18 фаз. Первые три входа формирователя импульсов 23 подключены к выходам широтно-импульсного модулятора 22, а четвертый вход - к соответствующему выходу преобразователя фаз 18. Блок 15 управления инвертором дополнительно снабжен аналоговым перемножителем 2k напряжений, развертывающим преобразователем 25 напряжений и тремя синусными преобразователями 26-28 напряжений. Входы аналогового перемножителя 24 напряжений подключены к выходам регуляторов 9, 10 напряжения и скольжения. Выход перемножителя 24 подключен к первому входу развертывающего преобразователя 25 напряжений, второй вход которого подключен к выходу делителя чстоты 17. Три других выхода преобразователя фаз 18 через соответствующие интеграторы 19-21 и синусные преобразователи 26-28 напряжений подключены к первым трем входам широтной импульсного модулятора, четверты вход которого подключен к выходу развертывающего преобразователя 25 напряжений. Развертывающий преобразователь 25 напряжения содержит два управляемых напряжением источника 29, 30 (см. фиг. 3) положительного и отрицательного токов, два токовых коммутатора 31 и 32, конденсатор1 33 и выходной повторитель 34, выход котрого образует выход развертывающего
5
0
5
0
5
0
5
0
5
преобразователя 25 напряжения, а вход соединен с одной из обкладок конденсатора 33 и выходами обоих токовых коммутаторов 31 и 32, одни входы которых, соединенные вместе, образуют частотный вход развертывающего преобразователя 25 напряжения, а другой вход каждого из коммутаторов 3,1 и 32 подключены к выходам управляемых напряжением источников тока соот- ветстввенно 29 и 30, входы которых образуют вход 21 развертывающего преобразователя 25 напряжения.
Частотно-регулируемый электропривод работает следующим образом.
Сигнал Ug с выхода тахогенерато- ра 8 и сигнал U7 с выхода датчика 7 частоты поступают на вход сумматора 13, где происходит их алгебраическое сложение. Результирующий сигнал U и сигнал задания частоты вращения поступают на вход сумматора 12, в котором происходит их сравнение и формирование сигнала ошибки, отрабатываемого регулятором скольжения 10. Сигнал управления выхода регулятора скольжения 10 поступает на вход блока управления 15 инвертором, который с определенным коэффициентом пропорциональности обеспечивает увеличение или уменьшение частоты напряжения статора, соответствующей уменьшению или увеличению скольжения, до полной компенсации ошибки. Одновременно сигнал U частоты напряжения статора, задающий уровень напряжения статора Us, с выхода датчика частоты 7 и сигнал с выхода датчика напряжения 6 поступают на входы сумматора 11, в котором происходит их алгебраическое суммирование. Сигнал рассогласования по напряжению статора отрабатывается регулятором напряжения 9 до компенсации рассогласования. Сигнал управления Ug поступает на вход блока управления 15 инвертором, который обеспечивает такое регулирующее воздействие на инвертор напряжения 5, что последний осуществляет линейное с определенным коэффициентом передачи увеличение или уменьшение напряжения статора, соответствующее увеличению или уменьшению частоты &3§ напряжения статора Ug.
Напряжение статора U5 можно выразить через сигнал задания U,U7 при отрицательной обратной связи по напряжению (см. фиг. 1)
vvvCv-f-v-VKX.
где - коэффициент передачи регулятора 9 напряжения по прямому входу и входу обратной связи соответственно;
Принимая; во внимание, что
имеем
nQ i Ј
(d 514 5L0 KllKiO)-KiS
Э- ;()Kf0 Kj K|-
Q
4
1
Выражение (1) с учетом выражени
1
б U
- коэффициент инвертора 5; О для 7
-коэффициент передачи датчи- U7 K7&)6 K7 2ufs,
ка 6 напряжения статора;где fg частота напряжения стато-коэффициент передачи бло-раf принимает вид ка управления 15. n u u
15IT Kjj KiS К 5-.с
V 7-кГк ЛГкГк 211 и
Iff
Тогда
4J К(5 К 5
Аналогично частоту статора Qs можIT - 1Ч s-IT
V ТнёГк кГк; V
(О
А6
Из выражения (3) следует, ито
Us
П (J U Кг К15. К 5
К,- 27.
(4)
fs 1-к;-к -кц5-к6
20
но выразить через сигнал задания И при положительной обратной связи по скольжению (см. фиг. 1)
о Ј i о , Ј i ,0-K К5+ио(ч KHJ-K -KJ-,
no94 жения статора U5 от напряжения упгде KW,K№- коэффициент передачи регу- равления UQ и частоты статора Јс о лятора 10 по прямому входу и входу обратной связи соответственно;
К (. - коэффициент пропорциональности блока управления Ј 15;
KC- - коэффициент инвертора 5 Сигнал задания . можно выразить
30
fs 1-к;-к -кц5-к6
Система широтно-импульсного управления инвертором напряжения обе печивает линейную зависимость напр жения ст;
равления и и частоты статора 5 напряжения управления , если ко эффициент передачи К,5 и,коэффициент пропорциональности К являются постоянными величинами, не зависят,
ми от U,- и fс.- Следовательно, праэч яасть выражения (k) представляет постоянную величину, не зависящую от Us и fs. Тогда изменение U5 одно значно определяется изменением fs 35 таким образом что электропривол
и,.со
J14
14
4,
гЛе кн коэФФиииент пропорциональности задатчика1k; k))4 заданно е значение частоты
вращения.
Для сигнала обратной связи имеем
8
здесь
иг к7-со5,
где С7 - коэффициент пропорциональности датчика 7; С05- круговая частота напряжени
статора; U8 KaCOr,
где Кд - коэффициент пропорциональности тахогенератора 8; СО - частота вращения ротора. Тогда, учитывая выражения для и,И, U и Ug, получаем
C05fЦ- А-кГо1 4 + (03к7-йэ,.к8 )к,°0 х .
Принимая; во внимание, что
имеем
nQ i Ј
(d 514 5L0 KllKiO)-KiS
Э- ;()Kf0 Kj K|-
Выражение (1) с учетом выражения
IT Kjj KiS К 5-.с
V 7-кГк ЛГкГк 211 А6
Из выражения (3) следует, ито
Us
П (J U Кг К15. К 5
К,- 27.
20
(4)
94 жения статора U5 от напряжения уп равления UQ и частоты статора Јс о
30
fs 1-к;-к -кц5-к6
Система широтно-импульсного управления инвертором напряжения обеспечивает линейную зависимость напряжения ст;
равления и и частоты статора 5 напряжения управления , если коэффициент передачи К,5 и,коэффициент пропорциональности К являются постоянными величинами, не зависят,гми от U,- и fс.- Следовательно, праэчг яасть выражения (k) представляет постоянную величину, не зависящую от Us и fs. Тогда изменение U5 однозначно определяется изменением fs 35 таким образом что электропривол
обеспечивает поддержание постоянного магнитного потока асинхронной машину во всем диапазоне регулирования частоты вращения ротора CDr. Из выражения (2) следует, что система широтно-импульсного управления инвертором напряжения обеспечивает линейную зависимость частоты COS напряжения статора Us от заданного скольжения С0,ц. если коэффициент пропорциональности, и коэффициент схемы инвертора Ч& являются постоянными величинами, не зависящими от Ug и fs . Следовательно,
40
50
(5)
5
г - (
ссо мк;-к к - к1-к|
Регулирование частоты напряжения статора в рассматриваемом электроприводе осуществляется использованием положительной обратной связи по скольжению с воздействием непоследственно на частоту напряжения ста™ тора. Из выражений (k) и (5) следует, что рассматриваемое частотное управление обеспечивает экономичное управление асинхронным электродвигателем путем регулирования его потока с постоянной величиной скольжения, В блоке 15 управления инвертором 5 напряжения входной сигнал поступает на вход преобразователя напряжение-частота 16, который обеспечивает линейную зависимость значения выходной частоты f (6 от уровня входного напряжения управления Uf0
,o
где К,|Ј-- коэффициент пропорциональности.
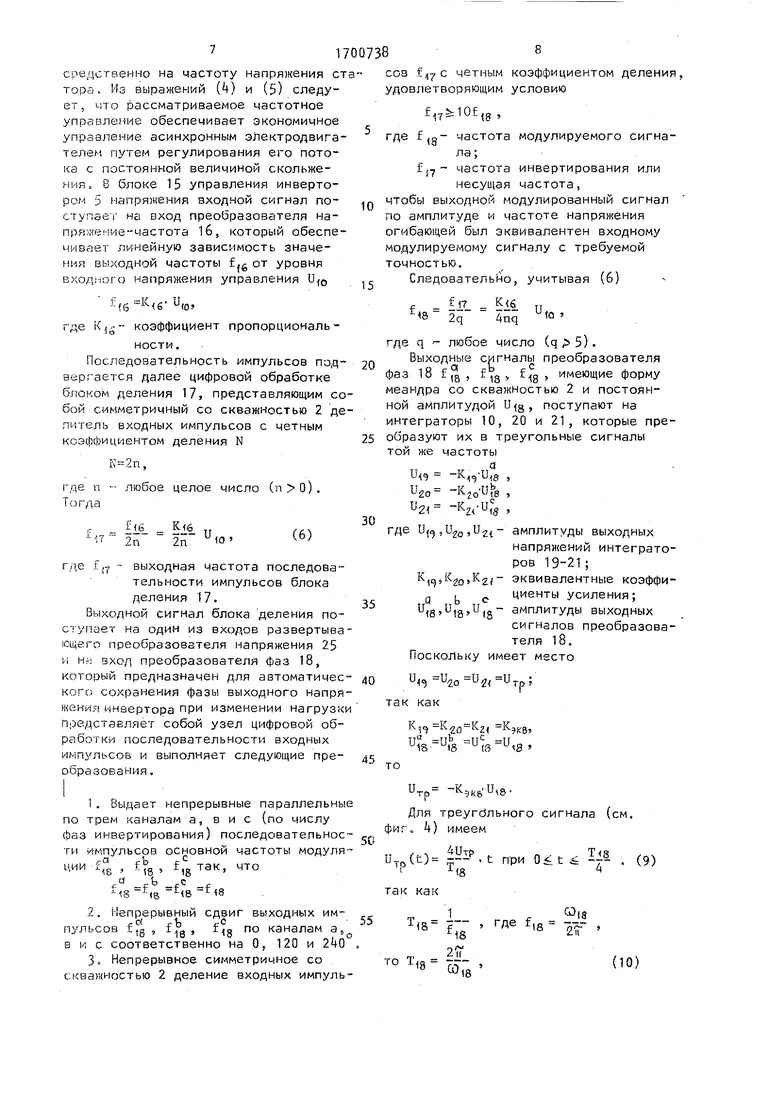
Последовательность импульсов подвергается далее цифровой обработке блоком деления 17, представляющим собой симметричный со скважностью 2 делитель входных импульсов с четным коэффициентом деления N
,
где п - любое целое число (). Тогда
17007388
сов f 47 с четным коэффициентом деления,
удовлетворяющим условию
f17b10f,8, где
10
15
20
25
7частота модулируемого сигнала ;
частота инвертирования или несущая частота,
чтобы выходной модулированный сигнал по амплитуде и частоте напряжения огибающей был эквивалентен входному модулируемому сигналу с требуемой точностью.
Следовательно, учитывая (6)
f Јi7- 2q 4nq
U
(О
где q - любое число (q ; 5).
Выходные сигналы преобразователя фаз 18 f {g , f ,8 , f , имеющие форму меандра со скважностью 2 и постоянной амплитудой U18, поступают на интеграторы 10, 20 и 21, которые преобразуют их в треугольные сигналы той же частоты
U4, -K,yuJ, , U20 -K20-U18 ,
U2 -K2, UW , где ,иго ,U2l- амплитуды выходных
б 2п
Q
- К11 т,
2n
(6)
Де f
«7
выходная частота последовательности импульсов блока деления 17.
Выходной сигнал блока деления поступает на один из входов развертывающего преобразователя напряжения 25 и на вход преобразователя фаз 18, который предназначен для автоматического сохранения фазы выходного напряжения инвертора ПРИ изменении нагрузки представляет собой узел цифровой обработки последовательности входных импульсов и выполняет следующие преобразования.
импульсов основной частоты модуляции f.an , fk s f так, что
48
„а
€D f MS s 18 fb fc , -Ь18 t18
ти
, t Г , HU HdtldJldM d , (
пульсов €,g , f ®a , f ig по каналам a
вис соответственно на 0, 120 и .
f17b10f,8, где
5
7частота модулируемого сигнала ;
частота инвертирования или несущая частота,
чтобы выходной модулированный сигнал по амплитуде и частоте напряжения огибающей был эквивалентен входному модулируемому сигналу с требуемой точностью.
Следовательно, учитывая (6)
f Јi7- 2q 4nq
U
(О
0
5
0
где q - любое число (q ; 5).
Выходные сигналы преобразователя фаз 18 f {g , f ,8 , f , имеющие форму меандра со скважностью 2 и постоянной амплитудой U18, поступают на интеграторы 10, 20 и 21, которые преобразуют их в треугольные сигналы той же частоты
U4, -K,yuJ, , U20 -K20-U18 ,
U2 -K2, UW , где ,иго ,U2l- амплитуды выходных
напряжений интеграторов 19-21;
5
эквивалентные коэффициенты усиления; амплитуды выходных сигналов преобразователя 18. Поскольку имеет место
2о (840
так как
,
тта тть
U18 U1S
8
45
то
UTO -K«e-U,8.
(см.
(9)
(10)
где - период импульсов модулируемой частоты; С0(&- круговая частота импульсов
модулируемой частоты. Подставив (8) и (10) в (9), имеем
uTp(t) Сигналы U.
2К9Кб 1Ле
C0tat.
(11)
и.
и U.,
U2o и U2i поступают на входы соответствующих синусных преобразователей напряжения 26-28, предназначенных для автоматического сохранения синусоидальной формы выходного напряжения инвертора при изме- 5 ния которых определяются уровнем
нении нагрузки (см. фиг. k). Синусный преобразователь предназначен для реализации выражения
входного напряжения , в завис ти от полярности импульсов поо редно подключаются к конденсатору на заряд и разряд, формируя тем с на выходе развертывающего преобра теля треугольные импульсы с часто Ј17и амплитудой, определяемой Uzs
WO-n.Jnff.1
г J
(12)
в диапазоне изменения входного напряжения
(ь)итГ
2 ™е исии f °тр
Подставив (8), (11) чаем
Wt)e - if
sin(cOIAt).(l3)
Следовательно:
U26(t) -| K9K6-U,8.sin(cOt8t), U27(t) -|K3K6-U18sinto,8t+120°), U2g(t) - /z K3j, sin((0( ).
Сигналы U2, иг, Ugg предназначены для получения на выходах а, в и с широтно-импульсногог модулятора 22 последовательности импульсов с частотой f17 , изменение ширины которых происходило бы в соответствии с изменением модулируемых напряжений , и2Г U28 меняющихся по синусоидальному закону. Другой сигнал U9 с выхода регулятора напряжения 9 поступа- ед на один из входов аналогового перемножителя напряжений 2k, на другой вход которого поступает сигнал с выхода регулятора скольжения 10.
Т.е. .Ug.U(0 , (14)
где коэффициент пропорциональности.
700738L°
Выходной сигнал U2 аналогового перемножителя напряжений 2k является входным для развертывающего преобразователя напряжений 25, который осуществляет развертывание напряжения и.хчастотным сигналом ff7 (см. фиг.5)Входные симметричные со скважностью 2 прямоугольные импульсы с а стотой ff управляют таковыми коммутаторами 31 и 32 (см. фиг. 3) , мерез которые управляемые входным напряжением U24 источники 29, 30 положительного и отрицательного токов, значе10
ния которых определяются уровнем
входного напряжения , в зависимости от полярности импульсов поочередно подключаются к конденсатору 33 на заряд и разряд, формируя тем самым на выходе развертывающего преобразователя треугольные импульсы с частотой Ј17и амплитудой, определяемой Uzs-.
Емкость конденсатора 33 определяется
с к - - Чз кс и зз
Тогда напряжение на конденсаторе Uj9
30
ТТ -ТТ - Т Т -7/ ---
изз иэз« Сзз
(15)
где
заряд конденсатора 5; Кс - коэффициент пропорциональности ; U jUjjj- потенциалы обкладок айв
конденсатора 33.
Заряд конденсатора, когда последний заряжается или разряжается постоянным во времени током, выражается, как
.
(16)
где KQ - коэффициент пропорциональности;
t - время заряда или разряда; I - ток разряда или заряда. Здесь имеет место ),
Время заряда или разряда конденсатора при условии, что скважность управляющих коммутаторами 31 и 32 пря-- моугольных импульсов, равная 2, определяется выражением
t, Ii7- -12f
(7
(17)
где - период управляющих импульсов с частотой
Величина тока заряжающего и разржающего конденсатор 33 является линейной функцией управляющего источниками тока напряжения определяется выражением
зжз-и -к-,- к24-и9-ию, (18)
где К. - коэффициент пропорциональности источников тока 31 и 32.
Тогда амплитуда выходного напряжния развертывающего преобразователя с учетом (6), (17), (15), (18) имеет вид
(t),K3,
П IT
г- U9 С 35 7
где .- коэффициент передачи. Следовательно
U2f(t)Cu-U9,(19)
здесь постоянный коэффициент
Кз4 Кс Ke-Kr KZ4 П
V
К
16
33
Правая часть последнего выражения есть величина постоянная и не зависит от напряжения управления и„ и частоты ft7 Следовательно, уровень выходных треугольных импульсов с частотой f, являющихся несущей для модулируемых сигналов , U и U2B, однозначно определяется линейной зависимостью от напряжения управления регулятора напряжения статора (см. фиг, 6}.
Тогда при постоянном коэффициенте инвертирования
С fs.
Ь , f 18
где q 5,
среднее значение напряжения на нагрузке будет меняться по синусоидальному закону
Un
UH 5- |U.einQ9t,
(20)
где U fj - величина напряжения источника питания;
5 кРУговая частота модуляции; /К - коэффициент глубины модуляции,
который показывает в каких пределах изменяются длительности открытого и закрытого состояния силовых полупоо
5
0
5
0
5
0
5
водниковых приборов инвертора напряжения в течение периода частоты модуляции. Из выражения (20) следует, что меняя значения параметров Д| л f, можно осуществить независимое регулирование амплитуды и частоты напряжения статора при постоянном коэффициенте инвертирования и неизменном питающем напряжении. Широтно-импульс- ный модулятор 22, на входы которого а, в и с поступают синусоидальные напряжения , Uj/j. и , задающие синусоидальную форму, фазу и частоту напряжений на статорных обмотках асинхронного электродвигателя осуществляет модулирование этих напряжений несущей частотой трем каналам а, в и с Блок формирования импульсов 23, синхронизированный от блока фазных преооразований -; 18, формирует управляющие для инвертора напряжения 5 импульсы. По выражению (20) глубину модуляции можно изменять: регулированием амплитуды модулируемого синусоидального сигнала при постоянной амплитуде частоты инвертирования; регулированием амплитуды сигнала инвертирования (сигнала несущей частоты) при постоянной амплитуде модулируемого синусоидального сигнала. Для исключения перемодуляции амплитуда входного сигнала не должна превышать амплитуду треугольного напряжения несущей частоты.
Согласно выражению (19), амплиту- . да треугольных напряжений несущей частоты изменяется регулятором напряжения 9. Тогда при постоянном уровне модулируемого синусоидального напряжения U26, U27 и U2gна входе модулятора 22, определяемых только величиной напряжения , среднее значение напряжения на нагрузке регулируется пропорционально напряжению управления Do. Из выражения (7)
4nq
или
(21)
,
здесь GЈ постоянный коэффициент
г СГ 5nq 7
т.е. значение частоты напряжения , статора линейно изменяется з зависимости от уровня напряжения на выходе регулятора скольжения 10. Следовательно, можно заключить согласно выражениям ( :), (19) и (21), что в замкнутой системе с двумя контурами стабилизации потока и частоты враще- ния возможно получение широкого диапазона частотного регулирования с высокой перегрузочной способностью при более простой, следовательно, более надежной схеме управления пре- образователем частоты в сравнении с известным решением.
Формула изобретения
Частотно-регулируемый электропривод, содержащий асинхронный электродвигатель , подключенный статорными обмотками к выходам преобразователя частоты, выполненного из последовательно соединенных неуправляемого выпрямителя, С-фильтра и инвертора, датчик напряжения статора и датчик частоты напряжения статора, тахогене ратор, установленный на валу асинхронного электродвигателя, регулятор напряжения, регулятор скольжения, тр сумматора, блок задания частоты вращения и блок управления инвертором, выполненный с преобразователем напряжение-частота, делителем частоты, преобразователем фаз, тремя интеграторами, широтно-импульсным модулятором и формирователем импульсов, выходы которого образуют выходы блока управления инвертором, при этом входы первого сумматора подключены к выходам датчиков напряжения статора и частоты напряжения статора, а вы- ход первого сумматора соединен с вхо
5 10
$
п 5 0
5
дом регулятора напряжения, входы второго сумматора подключены к выходу блока задания частоты вращения и выходу третьего сумматора, соединенного входами с выходами датчика частоты напряжения статора и тахогенера- тора, а выход второго сумматора соединен с входом регулятора скольжения , выход которого подключен к входу преобразователя напряжение-частота, соединенного через делитель частоты с входом преобразователя фаз, , первые три входа формирователя импульсов подключены к выходам широт- но-импульсного модулятора, а четвертый вход - к соответствующему выходу преобразователя фаз, отличающийся тем, что, с целью упрощения и повышения надежности, блок управления инвертором дополнительно снабжен аналоговым перемножителем напряжений, развертывающим преобразователем напряжений, и тремя синусными преобразователями напряжений, при этом входы аналогового перемножителя напряжений подключены к выходам регуляторов напряжения и скольжения, выход аналогового перемножителя напряжений подключен к первому входу развертывающего преобразователя напряжений , второй вход которого подключен к выходу делителя частоты, три других выхода преобразователя фаз через соответствующие интеграторы и синусные преобразователи напряжений подключены к первым трем входам ши- ротноимпульсного модулятора, четвертый вход которого подключен к выходу развертывающего преобразователя напряжений.
Т
v
SNfc
15 19 25 22 23
Ш
20 27
-О Г71
Шт г
27 И
25
А
16 П
10
8
Фиг1
0
Фие.З
J
ОС (
о г--.
I
S
