(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ ПЕРЕТОКА МОЩНОСТИ ПО ЛИНИЯМ ЭЛЕКТРОПЕРЕДАЧИ
ности в цепи управляющего сигнала; нелине ный элемент 5; логический элемент НЕ 6; пороговый элемент 7; логический элемент И 8; усилитель 9; пороговый элемент 10; логический элемент И 11; усилитель 12. Элементы 5-12 образуют блок возврата.
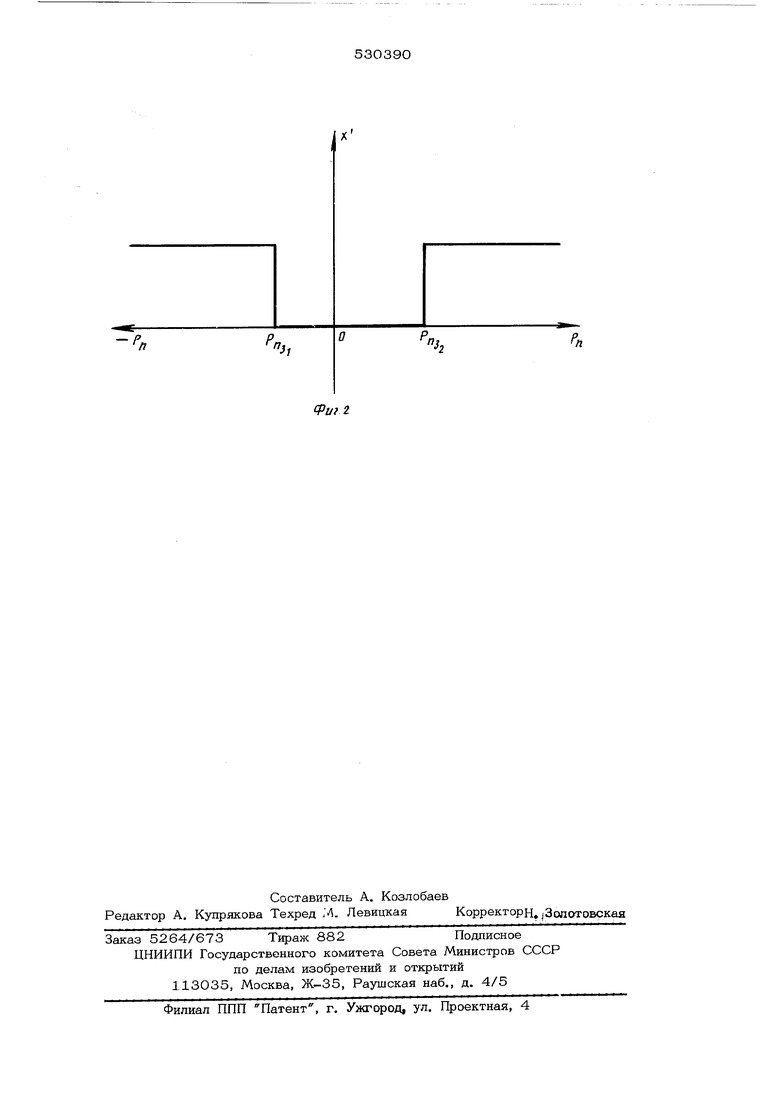
Нелинейный элемент 5 реализует характеристику, представленную на фиг. 2, и вместе с логическим элементом НЕ 6 предназначен для ввода в действие блока возврата при уменьшении перетока мощности Рр до заданного значения, при котором должен производиться возврат.
Пороговые элементы 7, 10 вводят в действие блок возврата при появлении знакопеременного сигнала U на выходе динамического звена 3. При этом один из этих элементов формирует на своем выходе сигнал, равный 1, при положительной полярности сигнала U , а другой - при отрицательной.
Каждый из логических элементов 8, 11 формирует на своем выходе единичный сигнал L Qпри наличии сигналов на обоих входах этих элементов.
Усилители 9 и 12 предназначены для усиления сигналов, поступающих с выходов логических элементов 8,11. При этом усилитель, находящийся в пепи, реагирующей на положительную полярность U , формирует отрицательный сигнал Z , а находящийся в цепИ; реагирующей на отрицательную полярность, - положительный сигнал Z .
Рассмотрим режим энергосистемы, характеризующийся величиной перетока мощности по линии, меньшей заданной величины причем этому режиму предшествовала перегрузка линии, и устройство автоматического ограничения сработало, т.е. на выходе динамического звена 3 присутствовал сигнал U .
В корректоре-ограничителе 1 производится опенка величины перетока мощности по линии. При значениях перетока, меньших заданной величины, сигнал X на выходе корректора-ограничителя равен О. В сумматоре 2 происходит суммирование сигнала X и сигнала Z на выходе блока возврата.
Сигнал 7. формируется при соблюдении условий:
(1)
Р
эг а)
где Г(- - переток мощности по ограничиваемой линии;
Р:
- уставки возврата.
и
.,
я
Величины
и Р,,
выбирают
пц
1 условий:
/
Р.
р
-4- ЛР
-ДР
«1
П
П
п.
п.
п
эг г 2,
5
51 И р.
где PI
- уставки системы ограь.
ничения; Й.РП,
и АРр,, - заданные отклонения уставок возврата от уставок системы ограничения,
в Соблюдение условия (1) осуществляется с помощью нелинейного элемента S и логического элемента НЕ 6. При этом на вход элемента 5 поступает значение перетока Р (-, по ограничиваемой линии электро-
5 передачи. При значениях перетока, лежащих вне зоны нечувствительности (см. фиг. 2), на выходе элемента 5 появляется сигнал х, Логический элемент НЕ 6 позволяет получить сигнал х на одном из входов каждо-
О 1о элемента И 8 и 11 при значениях перетока, лежащих в зоне нечувствительности нелинейного элемента 5, т.е. при вьшолнении условия (1).
Проверку условия (2) осуществляют по-
в роговые элементы 7, Ю, которые в случае выполнения этого условия формируют на других входах элементов И 8 или 11 сигналы Элементы 7, 1О имеют небольшую зону нечувствительности, введенную для предот-
0 вращения автоколебаний в контуре образованном блоком возврата, сумматором 2 и динамическим звеном 3 при переходе сигнала U через нуль.
Таким образом, в логических элементах
И 8 или 11 происходит проверка одновременного соблюдения условий (1) и (2). При соблюдении этих условий на выходе одного из этих элементов появляется сигнал Z Q , который усиливается в усилителях 9 или 12,
Q и полученный сигнал Z поступает в сум матор 3 со знаком + при отрицательной полярности величины U , и знаком - при положительной ее полярности.
Следовательно, сигнал Z появляется
5 на выходе блока возврата лишь при наличии управляющего сигнала U и при величине Р Р| , находящейся в зоне, ограниченной уставками возврата РПили п ,, (см. фиг. 2).
ф Под воздействием сигнала Z на выходе блока возврата при исчезновении причины, вызвавшей перегрузку линии, устройство ограничения перетоков возвращается в исходное состояние. Скорость возврата
5 можно увеличивать или уменьщать изменением величины сигнала Z , для этого необходимо изменить коэффициенты передачи усилителей 9 и 12,
При превышении перетоком РП задан-
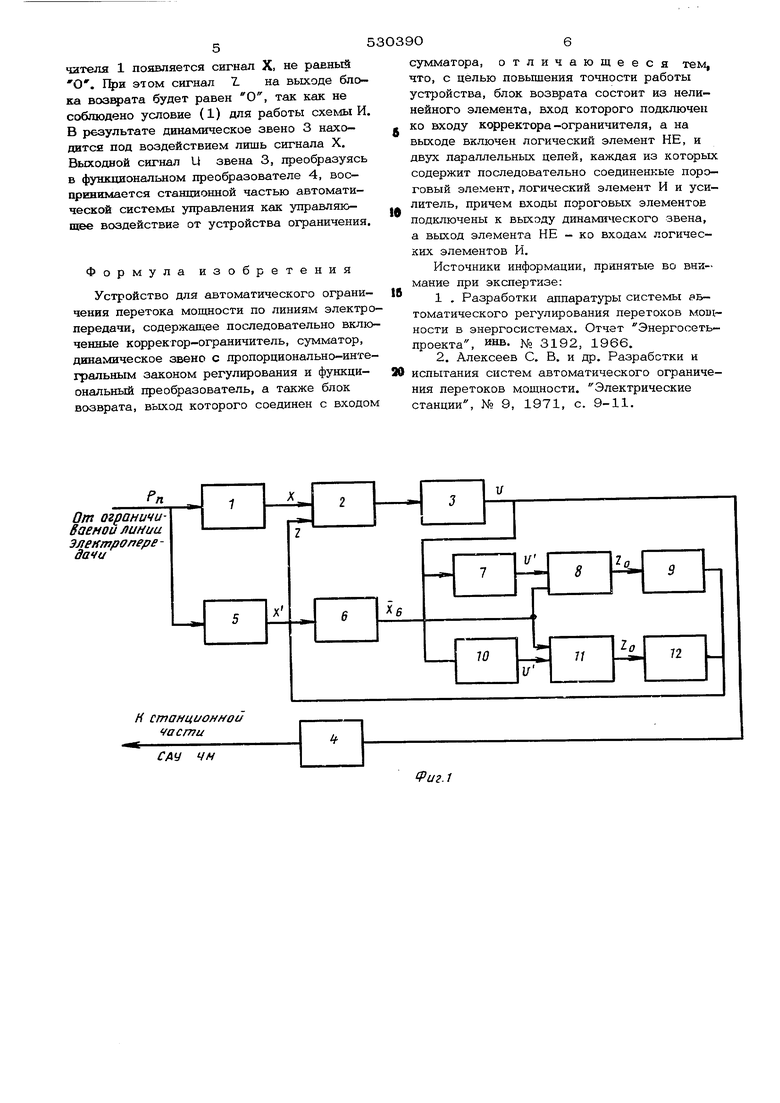
ной величины на вькоде корректора-ограничителя 1 появляется сигнал X, не равный О. Гфи этом сигнал Z на выходе блока будет равен О, так как не соблюдено условие (1) для работы схемы И В результате динамическое звено 3 находится под воздействием лишь сигнала X. Выходной сигнал U звена 3, преобразуясь в функциональном преобразователе 4, воспринимается станционной частью автоматической системы управления как управляюniee воздействие от устройства ограничения. Формула изобретения Устройство для автоматического ограничения перетока мощности по линиям электро передачи, содержащее последовательно вклю ченные корректор-ограничитель, сумматор, динамическое звено с пропорционально-инте гральным законом регулирования и функциональный преобразователь, а также блок возврата, выход которого соединен с входом 9О 6 сумматора. о т л и ч а ю Щ е е с я тем, что, с целью повьппения точности работы устройства, блок возврата состоит из нелинейного элемента, вход которого подключен ко входу ксфректора-ограничителя, а на выходе включен логический элемент НЕ, и двух параллельных цепей, каждая из которых содержит последовательно соединенные пороговый элемент, логический элемент И и усилитель, причем входы пороговых элементов подключены к выходу динамического звена, а выход элемента НЕ - ко входам логических элементов И. Источники информации, принятые во внимание при экспертизе: 1 , Разработки аппаратуры системы автоматического регулирования перетоков MODIности в энергосистемах. Отчет Энергосетьпроекта, инв. № 3192, 1966. 2. Алексеев С. В. и др. Разработки и испытания систем автоматического ограничения перетоков мощности. Электрические станции, № 9, 1971, с. 9-11.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования частоты и перетоков активной мощности в энергосистеме | 1985 |
|
SU1297167A1 |
| Устройство для автоматическогоРЕгулиРОВАНия чАСТОТы и АКТиВНОйМОщНОСТи эНЕРгООб'ЕдиНЕНия | 1979 |
|
SU845221A2 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Устройство для ограничения перетока активной мощности по межсистемной связи | 1978 |
|
SU744839A1 |
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1982 |
|
SU1078531A2 |
| Устройство автоматического регулирования частоты и перетоков активной мощности в энергосистеме | 1987 |
|
SU1480012A2 |
| Устройство для автоматического ограничения перетока мощности между двумя частями энергосистемы | 1985 |
|
SU1280669A1 |
| Способ автоматического регулирования параметров энергосистемы | 1986 |
|
SU1467664A1 |
| Устройство для управления режимом электрической подстанции | 1985 |
|
SU1325620A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
От ограничиВаенои линии элентропере дачи
К станционной
r/jy чм
РП
Л
/л
%
