(54) ЭЛЕКТРОПРИВОД С ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОДЕ -1ГАТЕЛЕ1А
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА | 2007 |
|
RU2360353C1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Частотнорегулируемый электропривод | 1978 |
|
SU767927A1 |
| Электропривод | 1981 |
|
SU966838A1 |
| Устройство для управления гистерезисным электродвигателем | 1981 |
|
SU974540A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1972 |
|
SU1840123A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
| СПОСОБ ПОДХВАТА ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 2011 |
|
RU2462808C1 |
1
Изобретение относится к области электротехники, а именно к частотно-управляемы синхронным приводам.
Известный гистерезисный электропривод включает в себя гистерезисный двигатель, с валом которого сочленен тахогенератор, инвертор с задающим генератором, управляемый вход которого подключен к выходу тахогенератора. По мере разгона гистерезисного двигателя увеличивается напряжение тахогенератора, что приводит к увеличению частоты. Таким образом осуществляется частотное регулирование.
Недостатком такого привода является усложение конструкции двигателя за счет использования тахогенератора, а также низкие энергетические показатели двигателя, связанные с низкой естественной намагниченностью ротора.
Эти недостатки устранены в другом частотно-регулируемом приводе, где регулирование частоты осуществляется по временному закону, а намагниченность ротора повышают путем импульсного намагничивания, причем намагничивание осуществляют при
превышении током двигателя в результате его скольжения наперед заданного значения. При этом чем меньще скольжение, тем меньше частота импульсов, а при постоянной их длительности больше скважность.
Недостаток этого привода состоит в том, что энергетически выгодный темп измененгя частоты при разгоне или торможении выбирают из худшего сочетания величины электромагнитного момента двигателя и момента нагрузки на валу, что связано с возможными технологическими разбросами в параметрах электродвигателя и изменениями их в процессе эксплуатации. Это затягивает время запуска или торможения.
Цель изобретения - сокращение времени разгона и торможения Эта цель достигается тем, что в электропривод введены измеритель скважности импульсов и генератор эталонной частоты импульсов, которые через узел сравнения подключены к управляемому задающему генератору.
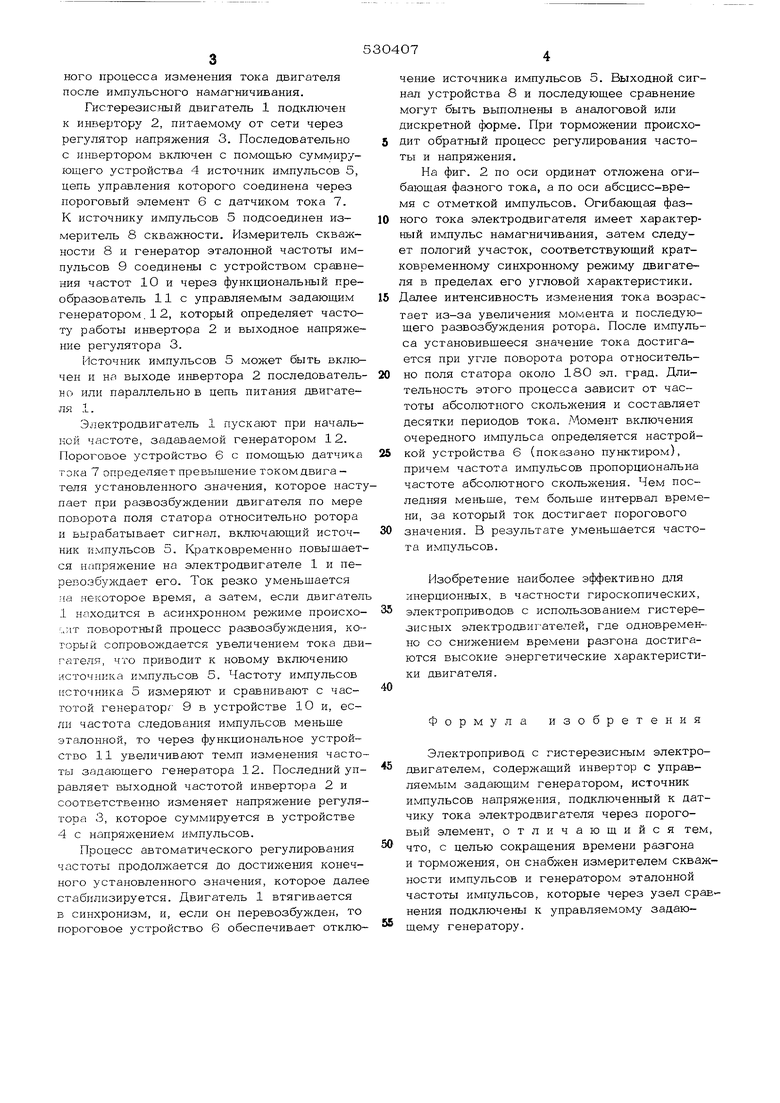
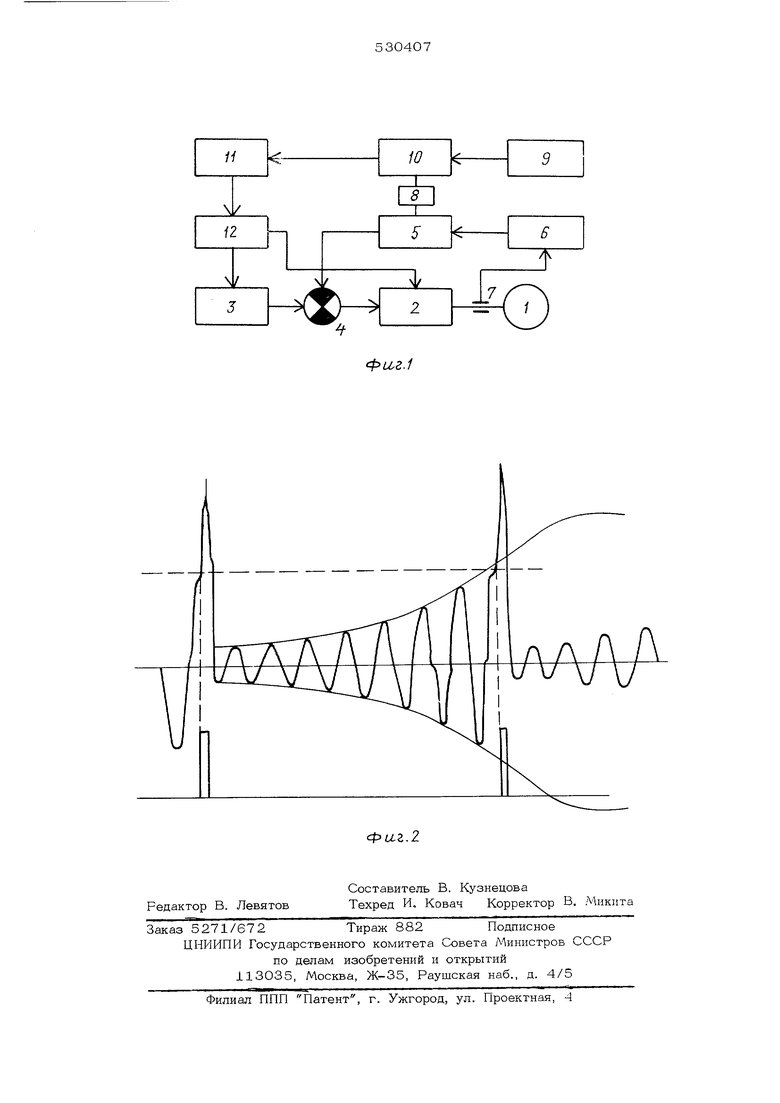
На фиг. 1 показана структурная схема электропривода; на фиг. 2 - график переходного процесса изменения тока двигателя после импульсного намагничивания. Гистерезис.ный двигатель 1 подключен к инвертору 2, питаемому от сети через регулятор напряжения 3. Последовательно с инвертором включен с помощью суммирующего устройства 4 источник импульсов 5, цепь управления которого соединена через пороговый элемент 6 с датчиком тока 7. К источнику импульсов 5 подсоединен измеритель 8 скважности. Измеритель скважности 8 и генератор эталонной частоты импульсов 9 соединены с устройством сравне яия частот 10 и через функциональный преобразователь 11с управляемым задающим генератором. 1 2, который определяет частоту работы инвертора 2 и выходное напряжение регулятора 3. Источник импульсов 5 может быть включен и на выходе инвертора 2 последователь но или параллельно в цепь питания двигателя 1. Электродвигатель 1 пускают при начальной частоте, задаваемой генератором 12. Пороговое устройство 6 с помощью датчика тэка 7 определяет превьпиение током двига теля установленного значения, которое наст пает при развозбуждении двигателя по мере поворота поля статора относительно ротора и вырабатывает сигнал, включающий источник импульсов 5. Кратковременно повышает ся напряжение на электродвигателе 1 и перевозбулщает его. Ток резко уменьщается па некоторое время, а затем, если двигател 1 находится в асинхронном режиме происходит поворотный процесс развозбуждения, когорый сопровождается увеличением тока дви гателе-, что приводит к новому включению источгпгка импульсов 5. Частоту импульсов источника 5 измеряют и сравнивают с часготой генераторг 9 в устройстве 10 и, если частота следования импульсов меньше эталонной, то через функциональное устройство 11 увеличивают темп изменения часто ты задающего генератора 12. Последний управляет выходной частотой инвертора 2 и соответственно изменяет напряжение регулятора 3, которое суммируется в устройстве 4 с напряжением импульсов. Процесс автоматического регулирования частоты продолжается до достижения конечного установленного значения, которое далее стабилизируется. Двигатель 1 втягивается в синхронизм, и, если он перевозбужден, то гюроговое устройство 6 обеспечивает отключение источника импульсов 5. Выходной сигнал устройства 8 и последующее сравнение могут быть выполнены в аналоговой или дискретной форме. При торможении происходит обратный процесс регулирования частоты и напряжения. На фиг. 2 по оси ординат отложена огибающая фазного тока, а по оси абсцисс-время с отметкой импульсов. Огибающая фазного тока электродвигателя имеет характерный импульс намагничивания, затем следут пологий участок, соответствующий кратовременному синхронному режиму двигатея в пределах его угловой характеристики. алее интенсивность изменения тока возрастает из-за увеличения момента и последующего развозбуждения ротора. После импульса установившееся значение тока достигается при угле поворота ротора относительно поля статора около 18О эл. град. Длительность этого процесса зависит от частоты абсолютного скольжения и составляет десятки периодов тока. Момент включения очередного импульса определяется настройкой устройства 6 (показано пунктиром), причем частота импульсов пропорциональна частоте абсолютного скольжения. Чем последняя меньще, тем больше интервал времени, за который ток достигает порогового значения. В результате уменьщается частота импульсов. Изобретение наиболее эффективно для инерционных, в частности гироскопических, электроприводов с использованием гистереаисных электродвиг-ателей, где одновременно со снижением времени разгона достигаются высокие энергетические характеристики двигателя. Формула изобретения Электропривод с гистерезисным электродвигателем, содержащий инвертор с управляемым задающим генератором, источник импульсов напряжения, подключенный к датчику тока электродвигателя через пороговый элемент, отличающийся тем, что, с целью сокращения времени разгона и торможения, он снабжен измерителем скважности импульсов и генератором эталонной частоты импульсов, которые через узел сравнения подключены к управляемому задающему генератору.
8
Фи.г.1
