ЧАСТОТНОРЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2553446C2 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Электропривод с гистерезисным электродвигателем | 1972 |
|
SU530407A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2605088C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Гистерезисный электропривод | 1984 |
|
SU1261078A1 |
| Устройство для управления гистерезисным электродвигателем | 1984 |
|
SU1246318A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
1
Изобретение относится к электротехнике и может быть использовано для запуска (торможения) и управления маховиками, центрифугами с использованием гистерезисного двигателя.
Известен электропривод, в котором осуществляется частотное регулирование гистерезисного двигателя путем изменения частоты вращения ротора, сравнения ее с заданной и управлением частотой задающего генератора в функции рассогласования частот {.
Недостаток устройства состоит в том, что двигатель работает с переменной частотой скольжения, изменяющейся в большом диапазоне. Это приводит к значительным потерям скольжения. Кроме того, изза низкого уровня возбуждения, характерного для гистерезисных двигателей, электропривод имеет низкое значение коэффициента мощности. Все это не позволяет обеспечить высокие энергетические характеристики привода.
Наиболее близким к изобретению является электропривод, содержаний гистерезисный электродвигатель, подключенный к преобразователю частоты, состоящему
из инвертора напряжения, входы которого соединены с блоками регулирования напряжения и возбуждения, канал регулирования частоты, который состоит из последовательно соединенных генератора стабильной частоты, блока выделения меньщей частоты, делителя частоты и распределителя импульсов, подключенного к управляющим выходам инвертора, датчики и задатчики тока статора двигателя, подсоедииеиные к входам блока сравнения токов, блок измереиия скорости и генера10тор сигналов управляемой частоты 2.
Этот привод осуществляет дискретное регулирование частоты по сигналу датчика тока, что обеспечивает небольщой диапазон изменения скольжения ротора,
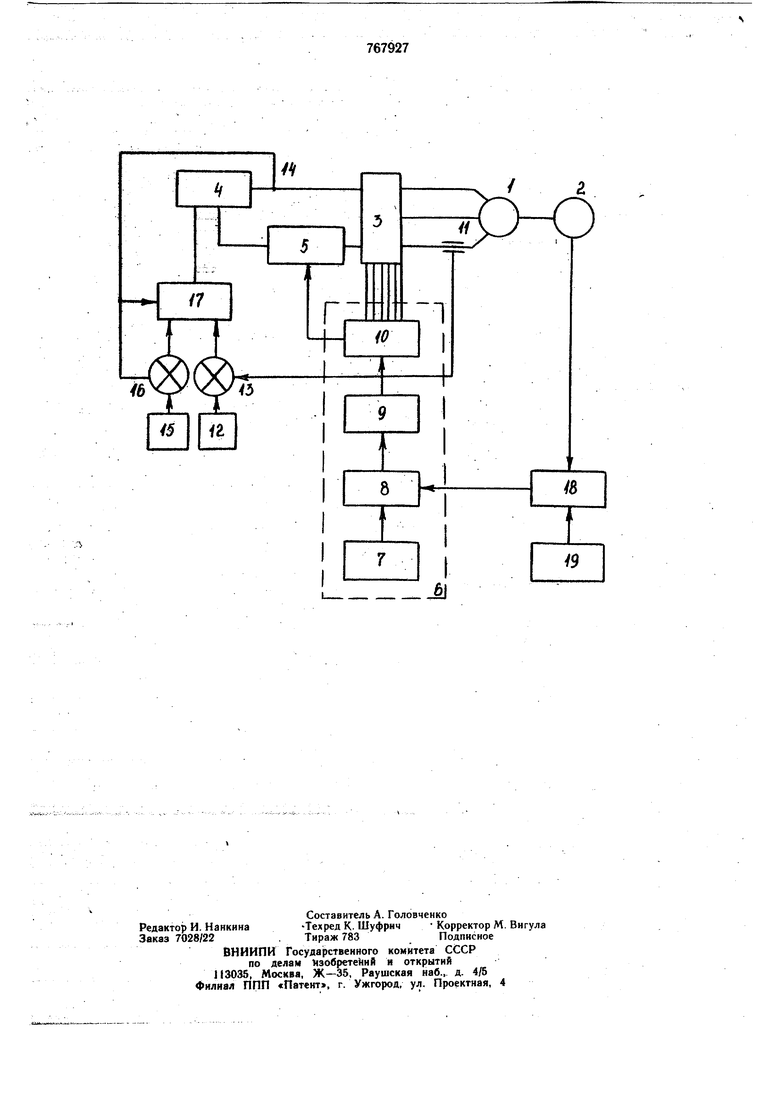
15 зависящий от заданной дискретности изменения частоты. Блок возбуждения формирует намагничивающие импульсы постоян ной частоты, которые увеличивают возбуждение двигателя. Этим обеспечивается по20 выщение энергетических показателей двигателя. Однако переменная частота скольжения и иеобходимость регулировать частоту в функции изменения тока приводит к тому, что двигатель работает на участке -механической характеристики, где имеет местб большое изменение момеита от максимального значения до минимального уровня, определяемого статической нагрузкой. Это уменьшает ёредшГ 51Шченгйе момента, а следовательно и быстродействие регулирования. В соответствии с изменением момента изменяется ток. Это приводит к некоторому уменьшению КПД запуска. Кроме того, по этой же причине не может быть применена обратная связь по току для регулирования- напряжения. Это заставляет использовать сложный и нелинейный функциональный блок, связывающий закоиы изменения частоты и Напряжения. Цель изобретения - повышение быстродействия. Поставленная цель достигается тем, что в известный частотно регулируемый электропривод, содержащий гистерезисный электродвигатель, подключенный к преобр зователю частоты, состойщему из инвертора напряжения, блока регулирования напряжейия, блока ИмпульсйЬгЪ рулНрованйя возбужДения и канала регулирования частоты, включающего последовательно соединенные генератор стабильной частоты и. распределитель блока выделения меньшей частоты, делитель 1гастоты, подключенный к управляющим выходам инвертора, датчик и. ;зад атчйк тоКа Cfатора элёктр оДвигателя, подсоединенных к входам блока сравнения токов, блок измерения скорости и геаератор сигналов управляемой частоты, введены блок суммирования, входы которого соединены с блоком измерения скорости и генератором сигналов управляемой частбты, а выход подключен к блоку выделения меньшей частоты, причем блок сравнения токов подключен ко входу блока регулй|}ОВания напряжения, а один из выходов распределителя соединен с блоком импульсного регулирования возбуждеНа чертеже представлейа схема электропривода. Электропривод содержит- гистерезисный электродвигатель 1 с датчиком 2 частоты вращения 2 на валу, подключенный к ин вертору 3 напряжения. Входы инвертора 3 подсоединены к блокам 4 регулирования напряжения, возбуждения 5 и .каналу 6 регулирования частоты , который состоит нагенератора 7 стабильной частоты, блока 8 выделения меньшей теля 9 частот, распределителя 10 импульсов. Датчик И TojKa двигателя и задатчик 12 у|р1овШ сШ п6й®8ШЙШШ 1(( входам блока 13 - с(авнения токов. Датчик И нйпряжения электррдвигателя и задатчяк 15 уровня найрйжения прдс дннены к входам блока 16 сравнения напряжения. Выход упомянутых блоков сравнення 13 и б через блок 17 изменения, режима работы регулятора напряжения подсоединены к входу регулятора напряжения. Выход датчика 2 частоты вращения 2 подсоединен к сумматору 18 частоты, на другой вход которого подключен блок 19 задания абсолютной частоты скольжения. Выход сумматора 18 частот подсоединен, к блоку 8 выделения меньшей частоты. Электропривод по указанному устройству представляет, собой трехканальную систему регулирования гистерезисного двигателя. Каналы регулирования напряжения k частоты обеспечивают заданный закон их изменения в пусковом (тормозном) режимах и стабилизацию - в рабочем. Блок 5 регулирования возбуждения обеспечивает импульсное намагничивание двигателя. Блок 5 возбуждения может быть включен в цепь постоянного или переменного тока инвертора 3, что непринципиально. Электропривод работает следующим образом.. В момент пуска, когда частота враЩения ротора равна нулю, начальная частота инвертора определяется блоком 19 задаНИН абсолютной частоты скольжения. Электродвигатель I начийает вращаться. В сумматоре 18 частот осуществляется суммирование частоты вращения с частотой блока 19, что приводит к соответствующему увеличению частоты синхронизации инвертора и скорости вращения двигателя. Образуется положительная обратная связь, обеспеч 1вающая запуск двигателя с постоянной и заданной стоянной и заданной частотой скольже.ния. При достижении на выходе сумматора 18 частоты генератора 7 дальнейший рост частоты прекращается, так как блок 8 переключает синхронизации) инвертора от задающего генератора 7. Частота скольжения ротора уменьщается и он плавно синхронизируется. Процесс изменения частоты сопровождения формированием намагничивающих импульсов, обеспечивающих перевозбуждение истерезисного двигателя в синхрон ом режиме и в области малых частот скольжения. Эффективность перевозбужу дения зависит от уровня потока. Жела-. тельно, чтобы он был в течение всего запуска постоянным. Это условие опреде-, ляет неизменность момента при постоянстве частоты скольжения и средней намагниченности ротора. В свою очередь, ростбянстйо момента скольжения и намагНиченности ротора определяет постоянство тока, потребляемого двигателем. В итоге, неизмеййОму уровню потока соответствует неизмеиный уровень тока. Поэтому связь между частотой и напряженнем целесообразно реализовать в пуске через стабили31ацию то.ка, что и сделано путем вве; аения отрицательной обратной связи по
S
току за счет подключения датчика 11 тока к схеме 13 сравнения.
В рабочем режиме сохранить пусковой уровень тька не целесообразно. Для этого в схеме используется дополнительная отрицательная обратная связь по напряжению, реализуемая подключением датчика 14 напряжения к блоку 16 сравнения.
В запуске с ростом частоты увеличивается напряжение. При достижении им рабочего уровня или предельного значения, предусмотренного в блоке 4 регулирования напряжения, блок 17 переключает режим работы блока регулирования напряжения с режима стабилизации тока на режим стабилизации напряжения. Если электродвигатель при этол( Достиг заданной синхронной скорости, то уровень тока будет определяться уровнем статической Harj)V3KH на валу.
Торможение осуществляется аналогично путем изменения знака скольжения за счет вычитания частоты абсолютного скольжения в блоке 18.
Таким образом, введение указанных блоков и связей позволяет реализовать положительную обратную связь по скорости с сохранением постоянного абсолютного скольжения и отрицательную обратную связь по току, что в итоге обеспечивает быстродействие регулирования за счет постоянства момента, высокий коэффициент мощности и КПД., упрощает реализацию за счет исключения функциональных блоков, связывающих частоты и напряжение, и позволяет осуществить автоматический
переход с режиа запуска на режим астатической стабилизации скорости.
Формула изобретения
Частотнорегулируемый электропривод, содержащий гистерезнсный электродвигатель. Подключенный к преобразователю частоты, состоящему из инвертора напрях ения, блока регулирования напряжения, блока
импульсного регулирования возбуждения и канала регулирования частоты, включающего последовательно соединенные генератор стабильной частоты, блок выделения меныиёй частоты, делитель частоты и распределитель импульсов, подключенный к управляющим выходам инвертора, датчик и задатчик тока статора электродвигателя, подключенных к входам блока сравнения токов, блок измерения скорости и генератО{ сигналов управляемой частоты, ог личающийся тем, что, с целью повыщения быстродействия, введен блок суммирования, входы которого соединены с блоком измерения скорости и генератором сигналов управляемой частоты, а выход подключен к блоку выделения меньщей
1 частоты, причем выход блока сравнения токов подключен к блоку регулирования напряжения, а один из выходов распределителя соединен с блоком импульсногб регулирования возбуждения.
Источники информации,
принятые во вниманне при экспертизе
л
