1
Изобретение относится к области весоизмерительной техники.
Известны устройства для управления весовыми порционными дозаторами, содержащие элементы пневмоавтоматики (1).
Известно также устройство (2), содержащие датчик веса, чувствительный элемент «соплозаслонка, элементы силовой компенсации веса нетто и веса тары, две группы элементов сравнения по числу элементов силовой компенсации веса нетто, пневмоклапаны и командный узел из элементов задержки, отрицания-, дросселя и триггера с раздельными входами.
Командный узел известного устройства выдает команды сигнала, например, на набор малых доз, а затем больщих. ПродолжИтельность эти.х команд рассчитывается по производительности питателей и устанавливается с запасом. Таким образом, после набора малых доз система работает на холостом ходу до следующей команды на набор больших доз.
Для устранения холостого хода, т. е. повыщения быстродействия системы управления в предлагаемом устройстве выход элемента задержки соединен с камерой управления лневVloклaпaнa, соединяющего первый элемент силовой компенсации веса нетто с соплом чувствительного элемента «сопло-заслонка через элемент «запрет, выход последнего элемента
сравнения первой группы сооощен с входом элемента «запрет и через дроссель с камерой управления пневмоклапана, соединяющего второй элемент силовой компенсации веса нетто с соплом чувствительного элемента «соплозаслопка, причем вход триггера подключен к
выходу последнего элемента сравнения второй
группы.
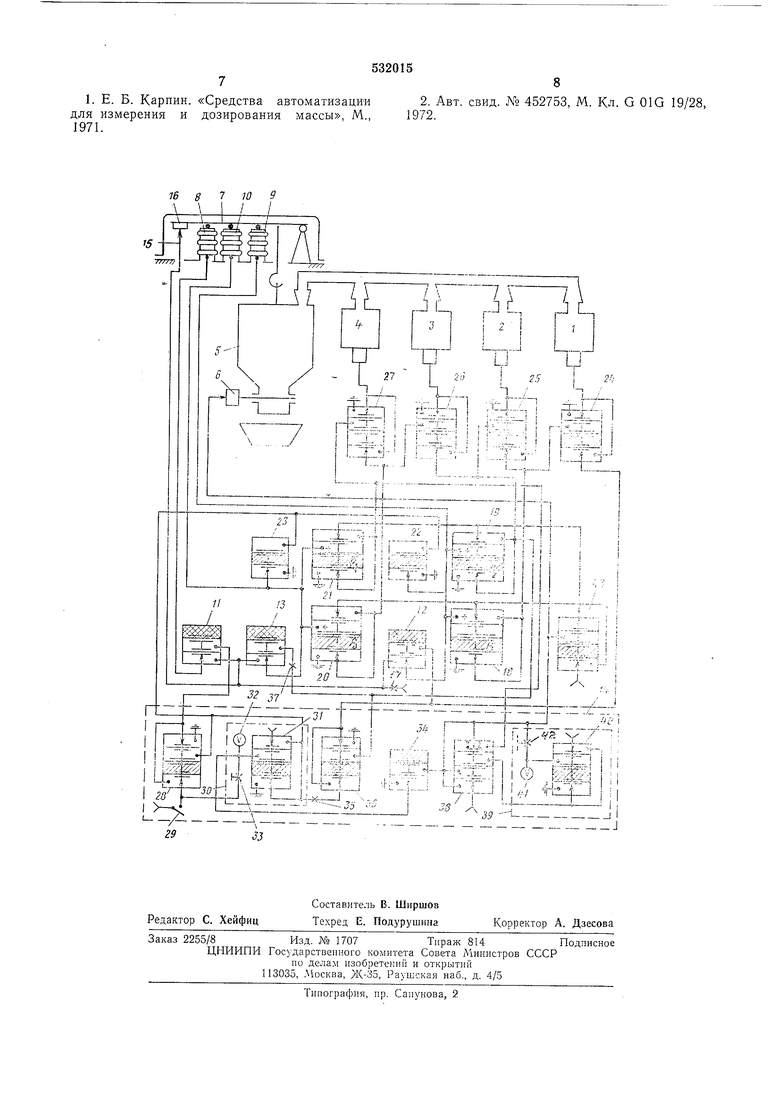
На чертеже нредставлена принципиальная
схема описываемого устройства для управления дозированием, например, четырех компонентов.
Устройство состоит из механизмов 1, 2, 3 и 4 поочередной подачи исходных компонентов в
бункер 5, снабженный разгрузчиком 6 и подвещенный на рычаге 7. Рычаг 7 уравновещивается тремя элементами 8, 9 и 10 силовой компенсации. Элемент 8 слулчит для компенсации веса бункера 5; элемент 9 - для компенсации
веса легковесных, например, первого и второго компонентов; элемент 10 - тяжеловесных, например, третьего и четвертого компонентов. Элементы 8, 9 10 при помощи пневмоклапанов 11, 12 п 13, управляемых от командного
узла 14, соеди11яются поочередно с соплом 15, прикрываемым заслонкой 16, закрепленной на рычаге 7. Сопло 15 через дроссель 17 соединяется с псточнпком сжатого воздуха. Элемент 9 постоянно соединен с плюсовыми камерами
элементов 18 и 19 сравнения пневматических сигналов, а элемент 10 - с плюсовыми камерами элементов 20 и 21.
Кроме того, элементы 9 и 10 соединяются с атмосферой соответственно через пневмоклапаны 22 и 23, управляемые от командного узла 14.
Минусовые камеры элементов 18, 19, 20 и 21 соединены с задатчиками (на чертеже не показаны), на выходе которых поддерживается давление РЬ Pz, РЗ и Р. Выходы элементов 18, 19, 20 и 21 сравнения Используются для управления подачей компонентов и соединены соответственно с механизмами 1, 2, 3 и 4 через элементы 24, 25, 26 и 27 «запрет.
Командный узел 14 предназначен для формирования команд на вывешивание тары, на набор легковесных компонентов, на набор тяжеловестных компонентов, на разгрузку бункера 5 и на повторение цикла. Он содержит элемент 28 «отрицание, который подключен через пневмотумблер 29 и источнику сжатого воздуха. Вход (камера управления) элемента 28 соединен с выходом узла 30 задержки сигнала, а выход соединен с камерой управления пневмоклапана 11. Узел 30 задержки сигнала состоит, например, из пневмореле 31, пневмоемкости 32 и регулируемого дросселя 33, соединяюн1,его пневмоемкость 32 с источником сжатого воздуха через пневмотумблер 29. Кроме того, пневмоемкость 32 может соединиться с атмосферой через пневмоклапан 34. Одновременно выход узла 30 соединен с камерами управления пневмоклапанов 22 и 23, а также через дроссель 35 и элемент 36 «запрет с камерой управления пневмоклапана 12 и дополнительно через элемент 24 «запрет с механизмом 1 подачи первого компонента.
Выход последнего элемента сравнения первой группы, в данном случае элемента 19 (элементы 18 и 19, соединенные с элементом 9, образуют первую группу, а элементы 20 и 21, соединенные с элементом 10, - вторую группу) , соединен с входом элемента 36 «запрет и через дроссель 37 с пневмоклапаном 13, соединяющим элемент 10 силовой компенсации тяжеловесных ко:М(ПОнентов с соплом 15.
Выход последнего элемента сравнения второй группы, в данном случае элемента 21, соединен с первым входом триггера 38 с раздельнымн входами, который взводится после набора всех компонентов при срабатывании элемента 21 сравнения. Выход триггера 38 соединен с разгрузчиком 6 бункера 5 и с камерой управления ппевмоклапана 34.
Для переключения триггера 38 в исходное положение, т. е. для отключения разгрузчика б, служит выключатель 39, который после разгрузки бункера 5 подает сигнал на второй вход триггера 38. В качестве выключателя 39 может быть использован сигнализатор разгрузки или другое устройство.
В ряде случаев для обеспечения разгрузки бункера 5 достаточно включить на определенное время разгрузчик 6, поэтому выключатель
39 выполнен в виде узла задержки ппевматического сигнала, состоящего, например, из пневмореле 40, пневмоемкости 41 и регулируемого дросселя 42. При этом вход узла 39 задержки соединен с выходом триггера 38, а его выход - со вторым входом триггера 38.
Чтобы исключить возможное кратковременное включение устройств 1, 2, 3 и 4 после набора доз в результате соединения эле.ментов 9 и 10 с атмосферой соответственно через пневмоклапаны 22 и 23, каналы питания эле.ментов 18, 19, 20 и 21 сравнения сообщены с источником сжатого воздуха через элемент 43 «отрицание, вход которого соединен с выходом триггера 38.
Работает устройство следующим образом. В исходном положении при наличии давления питания механизмы 1, 2, 3 и 4 для поочередной подачи исходных ко.мпоиентов и разгрузчик 6 выключены, элементы 9 и 10 силовой компенсации веса нетто соединены с атмосферой соответственно через пневмоклапаны 22 и 23.
Включением пневмотумблера 29 начинается процесс дозирования. Командный узел 14 формирует первую команду на вывешивание тары. Эта команда поступает в камеру управления пневмоклапана 11 от источпика сжатого воздуха через пневмотумблер 29 и элемент 28 «отрицание. Пневмоклапан 11 соединяет сопло 15с элементом 8 силовой компенсации веса тары. Сжатый воздух через дроссель 17 поступает в элемент 8 и сопло 15. Под действием веса тары сопло 15 закрыто заслонкой 16, поэтому давление воздуха внутри элемента 8 растет, создавая усилие на рычаг 7. При определенном давлении внутри элемента 8 вес тары компенсируется усилием, развиваемым элементом 8, рычаг 7 повернется по часовой стрелке, заслонка 16 приоткроет сопло 15, внутри элемента 8 будет автоматически ноддерживаться давление, пропорциональное весу тары.
Одновременно через пневмотумблер 29 сжатый воздух поступает на вход (дроссель 33) узла 30 задержки сигнала. Дроссель 33 и пневмоемкость 32 образуют инерционное звено на входе пневмореле 31, поэтому сигнал на выходе пневмореле 31 ноявляется спустя некоторое время ti после 1включения пневмотумблера 29. За время ti происходит вывешивание тары. Величина /i регулируется в данном случае дросселем 33.
При появлении сигнала на выходе пневмореле 31 сработает элемент 28 «отрицание, в результате чего первая команда снимается, так как элемент 28 «отрицание отключает камеру управления пневмоклапана 11 от источника питания и соединяет ее с атмосферой.
Одновременно сигнал с выхода пневмореле 31 поступает в камеру управления пневмоклапанов 22 и 23, которые разобщают от атмосферы элементы 9 и 10 силовой компенсации веса нетиэ. При этом элемент 9 силовой компенсации веса легковесных компопентов сообщается с соплом 15 через пневмоклапан 12, так как сжатый воздух с выхода пневморсле 31 (с выхода узла 30 задержки сигнала) поступает через дроссель 35 и элемент 36 «запрет в камеру управления пневмоклапана 12. Так как выход пневмореле 31 соединен с камерой управления пневмоклапана 12 через дроссель 35, то при появлении сигнала на выходе пневмореле 31 сначала пневмоклапан 11 разобщает элемент 8 п сопло 15, обеспечивая запоминание внутри элемента 8 давления, компенсирующего вес тары, а потом пневмоклапан 12 сообщает сопло 15 с элементом 9. Таким образом, сигнал на выходе пневмореле 31 является командой на запоминание веса тары и на включение механизма 1 подачи первого компонента, так как последнее соединено с выходом нневмореле 31 через элемент 24 «запрет, который в данный момент открыт.
Пропорционально весу поступающего первого компонента в бункер 5 будет расти давление внутри элемента 9 и в плюсовых камерах элементов 18 и 19 сравнения. Это давление будет сравниваться с заданными пневматическими сигналами PI и 2 в минусовых камерах элементов 18 и 19 сравнения. Величины сигналов PI и определяют нарастающим итогом вес дозы каждого компонента. Например, величина сигнала PI определяет вес дозы первого легковесного компонента, величина сигнала PZ - суммарный вес дозы первого и второго компонентов.
Когда давление внутри элемента 9 достигнет величины Pi, т. е. доза первого компонента будет набрана, сработает элемент 18 сравнения и на его выходе появится единичный сигнал, элемент 24 «отрицание сработает, выключит механизм 1 подачи первого компонента. При срабатывании элемент 18 сравнения одновременно включит механизм 2 подачИ второго легковесного компонента.
После набора второго компонента, в данном случае последнего легковесного компонента, сработает элемент 19 сравнения, и на его выходе появится единичный сигнал, который посредством элемента 25 «запрет отключит механизм 2 подачи второго компонента. При срабатывании элемента 19 сравнения включится механизм 3 подачи третьего, тяжеловесного компонента. Одновременно сигнал с выхода элемента 19 сравнения поступит на вход элемента 36 «запрет и с задержкой в камеру управления пневмоклапана 13. В результате этого камера управления пневмокланапа 12 соединяется с атмосферой, и пневмоклапан 12 разобщает сопло 15 и элемент 9. Давление внутри элемента 9 сохраняется, компенсируя вес первого и второго компонентов. Пневмоклапан 13 сообщает сопло 15 с элементом 10, поэтому вес поступающего третьего компонента будет компенсироваться давлением внутри элемента 10.
При срабатывании элемента 20 сравнения отключается подача третьего, и включается
подача четвертого компонентов. При срабатывании элемента 21 сравнения заканчивается цикл набора доз, и сигнал на выходе элемента 21 является командой на включение разгрузчика 6 бункера 5. Прн появлении сигнала на выходе элемента 21 взводится триггер 38, включая разгрузчик 6.
Одновременно сигнал на выходе триггера 38 открывает пневмоклапан 34. Пневмоемкость
32 сообщается через пневмоклапан 34 с атмосферой, пневмореле 31 выключается, и его выход соединяется с атмосферой. Пневмоклапаны 22 и 23 сообщают элементы 9 и 10 с атмосферой, на выходе элемента 19 сравнения сигнал исчезает, пневмоклапан 13 разобщает сопло 15 и элемент 10. Пневмоклапан 11 сообщает элемент 8 с сонлом 15, так как элемент 28 «отрицание пропускает сигнал от пневмотумблера 29 в камеру управления пневмоклапана 10.
Отключение разгрузчика 6 осуществляется выключателем 39. Выключатель 39 по истечении времени, необходимого для разгрузки бункера 5, подает сигнал на второй вход триггера 38. Триггер 38 перебрасывается, и па его выходе сигнал исчезает, разгрузчик 6 отключается, пневмоклапан 34 разобщает пневмоемкость 32 от атмосферы.
В момент отключения разгрузчика 6 заканчивается полный цикл дозирования и начинается следующий цикл, так как снова повторилась первая команда на вывещивание тары и начался отсчет времени узлом 30 задерл кк сигнала на формировании второй команды дл
подачи компонентов.
Формула изобретения
Пневматическое устройство для управлени весовым порционным дозатором, содержащее датчик веса, чувствительный элемент «соплозаслонка, элементы силовой компенсации веса нетто и веса тары, две группы элементов
сравнения по числу элементов си.човой компенсации веса нетто, пневмоклапаны и командный узел из элементов задержки, отрицания, дросселя и триггера с раздельными входами, отличающееся тем, что, с целью повыщения быстродействия, в нем выход элемента задержки соединен с камерой управления пневмоклапана, соединяющего первый элемент силовой компенсации веса .нетто с соплом чувствительного элемента «сопло-заслонка
через элемент «запрет, а выход последнего элемента сравнения первой группы сообщен с входом элемента «запрет и через дроссель с камерой управления пневмоклапана, соединяющего второй элемент силовой компенсации
веса нетто с соплом чувствительного элемента «сопло-заслонка, причем вход триггера подключен к выходу последнего элемента сравнения второй группы.
Источники информации, принятые во внимание при экспертизе. 1. Е. Б. Карпин. «Средства автоматизации для измерения и дозирования массы, М., 1971. 2. Авт. свид. № 452753, М. Кл. G 01G 19/28, 1972. 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дискретного весового многокомпонентного дозирования | 1973 |
|
SU510652A1 |
| Устройство для управления весовым многокомпонентным дозатором | 1978 |
|
SU744489A1 |
| Весовой порционный дозатор с устройством управления | 1980 |
|
SU1237914A1 |
| Устройство управления дозатором | 1983 |
|
SU1200253A1 |
| Пневматический весовой дозатор непрерывного действия | 1984 |
|
SU1185104A1 |
| Устройство дозирования корма при контрольном откорме свиней | 1982 |
|
SU1017238A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Устройство для многокомпонентного весового дозирования | 1983 |
|
SU1137331A1 |
| Устройство для преддоильной обработки вымени | 1982 |
|
SU1147297A1 |
| Устройство для управления доильным аппаратом | 1980 |
|
SU927204A1 |