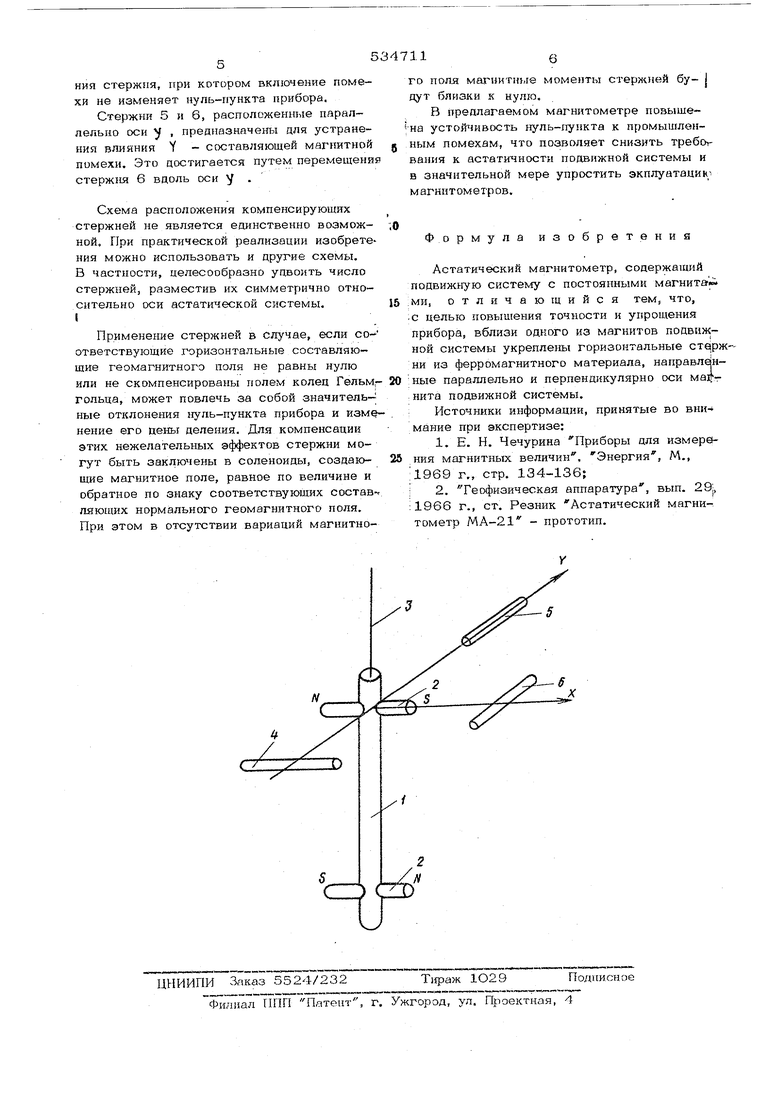
(54) АСТАТИЧЕСКИЙ МАГНИТОМЕТР мы, обуслоБленндя непараллельиостью последних. Величина AMjj-проекции лМ на плоскость осей магнитов обусловлена неиден тичностью последних и может быть сведена к минимуму в процессе изготовления прибора посредством соответствующего подбору магнитов и их искусственного старения. Про цессы естественного старения материалов, иэ которых изготавливается астатическая система, приводят к изменению |астатично ти системы, из-за чего.возникает необходимость ее периодической регулировки. Для регулировки астатичности подвижная часть астатического магнитометра снабжает ся механически поворачиваюшимися малыми постоянными магнитами Гз}. Однако и этот магнитометр не обладает достаточной точ ностью и сложен, Лель, из fi эpтeниi. - повышение точности упрощения прибора. Это достигается тем, чт в астатическом магнитометре, содержащем п движную систему с постоянными магнитами, вблизи одного из магнитов подвижной систем укреплены горизонтальные стержни из ферро MfirmiTHoroматериала, направленньгепараллел но и перпендикулярно оси магнита подвижной системы. На чертеже inpeACTaBneH ; астатический магнитометр. Астатическая система 1 имеет два посто янных магнита 2, подвешенные на упругой нити 3. В горизонтальной плоскости на уров не верхнего магнита астатической системы расположены стержни 4, 5 и 6 из ферромагнитного материала. Стержень 4, распо ложенный на расстоянии /д от астатической системы предназначен для устранения однородных магнитных помехоН направленных вдоль оси X . Астатический магнитометр работает еледующим образом. Непосредственное воздействие магнитной помех.и на астатическую систему вызывает вращающий момент, равный { FI : fР дм 5-н Oi тлt За счет перемещения стержня ; 4 вдоль оси К осуществляется компенсация;вращающего момента FJ действием магнитного стержня на верхний магнит астатической системы. Однородная магнитная помеха dHy. вызы: вает изменение магнитного момента оМхСтер жня 4, равное: N-NA О -S S x-О М -- где В , L и л/ - соответственно, диаметр, н коэффициент размагничивания стержня, а - магнитная восприимчиыють материала стержня. Поскольку стержни изготавли-, ваю1х;я из ферромагнитных материалов, то N 1, . ЭТР LOH; поэтому V бМ X Изменение магнитного момента стержня влечет за собой изменение магнитного поля В районе верхнего, магнита астатической сис11 емы и вызывает вращающий момент Р„, Принимая во внимание, что на рассто1шии IJf магнитное поле стерншя алалогиш о мапг |:штному диполю, находим; .. 53грЧ длудбн ).75/2 где й)С абсцисса центра стержня 4. Для того, чтобы отсутствие астатичнос- ти компенсировалось воздействием магнитного поля стержня, необходимо, чтобь Р, и Pg были равны по величине и противополож;ны по знаку, т. е. (S) ТТЁч (uK)j Размеры стержня, необходимые для компенсации заданной астатичности равны Ку S I -г-- ,. Максимальное значение R досДтигается при . Подставляя это значение л t в формулу (S) находим, что компенсация К-у будет выполняться, если D / 1,1 V Пусть стержень имеет цилиндрическую форму и отнощение длины L к диаметру Б ,. равное 10. Коэффициент размагничивания .W такого стрежьш равен 0,255, Подставляя указанные значения / и в формулу (Q ) находим, что для компенса-ии магнитного момента системы при К - 100 достаточно использовать стержень с размерами В 0,07Уо и L 7Уо . Регулировка компенсации влияния помехи О поможет быть выполнена следующим рбразом, С помощью соответствующего имитатора создаем (например, посредством включения электромагнитного тока в цепь имитатора) в районе астатической системы однородную помеху dHx и наблюдаем обусловленное этой помехой изменение нуль-пункта прибора. Передвигая вдоль оси X стержень 5 и многократно включая искусственную помеху о HI добиваются такого пЪложения стержня, при котором включение помехи не изменяет нуль-пункта прибора. Стержни 5 и 6, располсх енные параллельно оси у , предназначены для устранения влияния Y - составляющей магнитной помехи. Это достигается путем перемещени стержня 6 вдоль оси у . Схема расположения компенсирующих стержней не является единственно возможной. При практической реализации изобрете ния можно использовать и другие схемы. В частности, целесообразно удвоить число стержней, разместив их симметрично относительно оси астатической системы. I Применение стержней в случае, если соответствующие горизонтальные составляющие геомагнитного поля не равны нулю или не скомпенсированы нолем колец Гельм гольца, может повлечь за собой значительные отклонения нуль-пункта прибора и изм нение его цены деления. Для компенсации этих нежелательных эффектов стержни могут быть заключены в соленоиды, создающие магнитное поле, равное по величине и обратное по знаку соответствующих состав ляющих нормального геомагнитного поля. При этом в отсутствии вариаций магнитного ПОЛЯ магнитные моменты стержней бу- j дут близки к нулю. В предлагаемом магнитометре повышена устойчивость нуль-пункта к промышленным помехам, что позволяет снизить требог вания к астатичности подвижной системы и в значительной мере упростить экплуатацинмагнитомегров. Формула изобретения Астатический магнитометр, содержащий подвижную систему с постоянными магнита , ми, отличающийся тем, что, с целью повышения точности к угфощения прибора, вблизи одного из магнитов подвижной системы укреплены горизонтальные стдрж ни из ферромагнитного материала, нанравлвнные параллельно и перпендикулярно оси Mai нита подвижной системы. Источники информации, принятые во вни- мание при экспертизе: 1. Е. Н. Чечурина Приборы для измервния магнитных величин, Энергия 1969 г., стр. 134-136; 2. Геофизическая аппаратура, вып. 29|, 1966 г., ст. Резник Астатический магнитометр МА-21 - прототип.
Х
CZ
х 
| название | год | авторы | номер документа |
|---|---|---|---|
| Астатический магнитометр | 1973 |
|
SU501372A1 |
| Астатический магнитометр | 1978 |
|
SU723468A1 |
| Магнитометр | 1984 |
|
SU1275338A1 |
| СТАБИЛИЗИРОВАННЫЙ ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2542711C1 |
| Электрический магнитометр | 1950 |
|
SU98834A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| СПОСОБ ЗАЩИТЫ МЕТАЛЛИЧЕСКОГО ФЕРРОМАГНИТНОГО ОБЪЕКТА ОТ МАГНИТОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ | 2017 |
|
RU2647482C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| Астатический магнитометр | 1978 |
|
SU746354A1 |
