кими собственными частотами колебаний, зависящими от массы перемещаемого груза.
Обеспечение устойчивости работы такой системы основано на иснользовании известных способов коррекции и сводится к искусственному сужению полосы пропускания частот обратимой следящей системы до величины частоты среза, значительно меньщей, чем наименьшая собственная частота внешней кинематической цепи (сОсеист.0,1 СОмин.юш.) .
Такой принцип коррекции ОС приводит к резкому ухудшению статических и динамических характеристик системы, что является основным недостатком прототипа.
Целью изобретения является увеличение быстродействия и точности воспроизведения нагрузок на задающем органе системы.
Поставленная цель достигается тем, что в системе установлены второй сумматор, первый н второй переключатели и первый и второй детекторы, входы которых соединены с соответствующими датчиками момента, а выходы - с соответствующими входами второго сумматора, выход которого соединен с первыми входами переключателей, второй вход первого переключателя соединен с первым датчиком момента, второй вход второго переключателя соединен с выходом блока деления, выходы первого переключателя соединены соответственно с первым входом первого и вторым входом второго корректирующих устройств, а выходы второго переключателя соединены соответственно со вторым входом первого и первым входом второго корректирующих устройств.
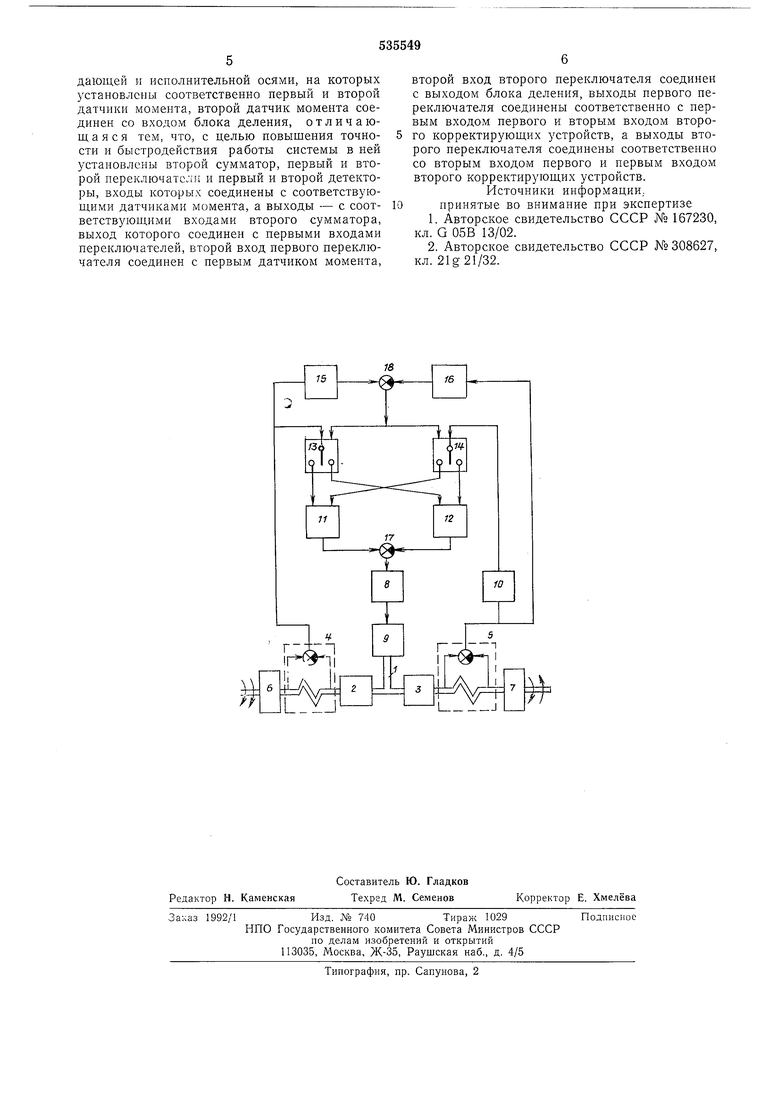
На чертеже представлена блок-схема обратимой следящей системы.
Система содержит кинематическую связь 1, первый н второй редукторы 2, 3, первый и второй датчики момента 4, 5, задающую и исполнительную оси с инерционными массами 6, 7, усилитель 8, электродвигатель 9, блок деления 10, первое и второе корректирующие устройства И, 12, первый и второй переключатели 13, 14, первый и второй нефазочувствптельные детекторы 15, 16, первый и второй сумматоры 17, 18.
Система работает следующим образом.
При воздействии на рукоятку управления датчиком момента 4 вырабатывается сигнал, который будучи усиленный усилителем 8, воздействует на двигатель 9, заставляя последний вырабатывать момент, помогающий оператору задавать движение. Если на исполнительном органе появится нагрузка, то датчиком моментов 5 будет выработан пропорциональный сигнал, который уменьшит действие датчика 4. При этом произойдет торможение системы до тех пор, пока оператор не приложит доиолнительиое усилие (момент), пропорциональное величине воздействующей нагрузки.
В предлагаемой системе реализованы свойства демпфера собственных частот кинематических цепей.
Этот эффект достигается за счет установки корректирующих устройств 11 и 12 в каждую цепь сигналов датчиков моментов.
Корректирующие устройства выполняются таким образом, что их совместное воздействие при определенном направлении передачи энергии образует положительную фазовую область (область опережающей фазы) в фазовой характеристике замкнутой обратимой следящей
системы. Для этой цели используются антирезонансные / С-цени.
Однако существование положительной фазовой области при стационарной установке корректирующих цепей будет иметь место только
при вполпе определенном нанравлепии передачи энергии (от оиератора в нагрузку или от нагрузки к оператору).
Поэтому для сохранения положительной фазовой области при любом паправлении передачи энергии входы корректирующих цепей автоматически подключаются к соответствующим цепям сигналов датчиков моментов в зависимости от направления передаваемой энергии.
Для этого датчики моментов 4 и 5 подключаются к входам корректирующих устройств через коммутирующие ключи 13 и 14, управляемые сигналом, знак которого зависит от направления передаваемой энергии.
Сигнал, указывающий на направление передаваемой энергии, может быть получен при сравнении сигналов, пропорциопальных абсолютным величинам мощностей оператора (Оз, Мз) и нагрузки (йи. Ми), где Из, Й„ - соответственно скорости оператора и нагрузки; Мз, Ми - соответственно моменты оиератора и нагрузки.
При хорошем демпфировании колебаний внешних кинематических цепей переходный
процесс в системе будет носить апериодический характер. В этом случае ипформацией направления передачи мощности служить знак сигнала, полученного от сравнения абсолютных величин сигналов, пропорциональных моментам оператора (Мз) и нагрузки
(Ми).
С этой целью в схеме в цепи датчиков моментов 4 и 5 устанавливают нефазочувствительные детекторы 15 п 16, а сигнал, полученный после сравнения выходных напряжений детекторов, используется для управления бесконтактными ключами 13 и 14.
Степень компенсации вредных сил сопротивлению движения и иредлагаемой системе равиа 10 против 3, т. е. точность системы повышается по меньшей мере в три раза.
Формула изобретения
Обратимая следяшая система, содержащая первое и второе корректирующие устройства, выходы которых соединены с соответствующими входами первого сумматора, выход которого через усилитель соединен со входом электродвигателя, вал которого кинематически через первый и второй редукторы соединен с задающей и исполнительной осями, на которых установлены соответственно первый и второй датчики момента, второй датчик момента соединен со входом блока деления, отличающаяся тем, что, с целью повышения точности и быстродействия работы системы в ней установлены второй сумматор, иервый и второй переключатели и иервый и второй детекторы, входы которых соединены с соответствующими датчиками момента, а выходы - с соответствующими входами второго сумматора, выход которого соединен с первыми входами переключателей, второй вход первого переключателя соединен с первым датчиком момента.
второй вход второго иереключателя соединен с выходом блока деления, выходы первого переключателя соединены соответственно с первым входом первого и вторым входом второго корректирующих устройств, а выходы второго переключателя соединены соответственно со вторым входом первого и первым входом второго корректирующих устройств. Источники информации., принятые во внимание при эксиертизе
1.Авторское свидетельство СССР № 167230, кл. G 05В 13/02.
2.Авторское свидетельство СССР № 308627, кл. 21 g 21/32.
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Обратимая следящая система | 1982 |
|
SU1029137A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| Устройство управления приводом делительной машины | 1990 |
|
SU1775271A1 |
| Обратимая следящая система | 1983 |
|
SU1176301A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| ПЕРЕДАЮЩЕЕ УСТРОЙСТВО ДЛЯ РАДИОСВЯЗИ | 1997 |
|
RU2115999C1 |
| А И
