Изобретение относится к технике автоматического регулирования, к классу двух- канальных нелинейных корректирующих устройств и может быть использовано в быстродействующих системах позиционирования, например станков с программным управлением, приводов роботов-манипуляторов, высококачественных следящих установок, а также в тех системах автоматического регулирования (САР), где требуется высокая точность и надежность с учетом изменения их параметров в процессе работы.
Известно нелинейное корректирующее устройство, содержащее нуль-орган, последовательно соединенные усилитель, блок выделения модуля и блок умножения, последовательно соединенные второй сумматор, пиковый детектор, первый масштабирующий блок, первый сумматор, сигнум-реле, формирователь импульсов, блок задержки и
элемент ИЛИ, последовательно соединенные ключ и второй масштабирующий блок, подключенный выходом к второму входу второго сумматора, первым входом подключенного к входу усилителя, к второму входу первого сумматора, к сигнальному входу ключа и к входу нуль-органа, выходом подключенного к второму входу элемента ИЛИ, первым входом подключенного к управляющему входу ключа, выход сигнум-реле подключен к второму входу блока умножения.
Недостатком такого устройства является низкое быстродействие, так как увеличение коэффициента усиления устройства для повышения быстродействия приводит к появлению в системе колебательных процессов. Изменение параметров системы в широком диапазоне в процессе работы также приводит к возникновению колебаний, которые не позволяют получить хорошую
сл
С
vj
GJ
4
о VI
О
точность позиционирования. Устройство также сложно в настройке.
Наиболее близким по технической сущности является устройство, содержащее последовательно соединенные пиковый детектор, первый масштабирующий блок, первый сумматор, сигнум-реле, выход которого подключен к второму сигнальному входу первого переключателя, последовательно соединенные второй масштабирующий блок и второй сумматор, вторым входом подключенный к второму входу первого сумматора и к входу нуль-органа, выходом подключенного к управляющему входу пикового детектора, источник постоянного напряжения и первый и второй переключатели, управляющие входы которых подключены к выходу второго сумматора, первые сигнальные входы - к второму входу второго сумматора и к сигнальному входу пикового детектора, выходом соединенного с входом второго масштабирующего блока, второй сигнальный вход второго переключателя подключен к выходу источника постоянного напряжения, выход второго переключателя соединен с входом усилителя, выход которого является вторым выходом устройства, выход первого переключателя является первым выходом устройства, а сигнальный вход пикового детектора является входом устройства. Это корректирующее устройство формирует управляющий сигнал таким образом, что ком- леисирует ЭДС исполнительного двигателя, обеспечивая его разгон и торможение с максимально возможным ускорением при заданных параметрах САР. Недостатки устройства заключаются в сложности выбора момента перехода в режим, который возникает при подходе к точке позиционирования (третий режим), когда кинетическая энергия уже погашена предыдущим режимом торможения. Неудачный выбор момента перехода в третий режим приводит к затягиванию переходного процесса и ухудшению динамической точности. Обычно момент перехода в третий режим определяют экспериментально, что связано со значительными трудностями.
В случае удачного выбора момента перехода в третий режим система переходит в устойчивый установившийся режим, обеспечивающий заданное качество процесса позиционирования только при постоянстве заданных параметров системы (коэффициента усиления и постоянной времени). Увеличение коэффициента усиления также как и уменьшение постоянной времени в третьем режиме неизбежно вызывает перерегулирование, а уменьшение коэффициента
усиления так же как и увеличение постоянной времени приводит к затягиванию переходного процесса и снижению динамической точности. Цель изобретения - повышение точности устройства.
Поставленная цель достигается тем, что в нелинейное корректирующее устройство, содержащее последовательно соединенные
пиковый детектор, вход которого является входом устройства, первый масштабирующий блок, первый сумматор, сигнум-реле, выход которого соединен с первым информационным входом переключателя, выход
которого является выходом устройства, последовательно соединенные второй масштабирующий блок и второй сумматор, выход которого соединен с управляющим входом переключателя, второй вход соединен с входом устройства, с вторым входом первого сумматора и с входом нуль-органа, выход которого соединен с управляющим входом пикового детектора, соединенного выходом с входом второго масштабирующего блока,
введены последовательно соединенные дифференциатор, делитель, инвертирующий усилитель и блок умножения, причем выход блока умножения подсоединен к второму информационному входу переключателя, второй его вход соединен с выходом дифференциатора, вход которого соединен с выходом устройства и вторым входом делителя.
Сущность изобретения состоит в том,
что в результате введения в предлагаемое устройство новых блоков-дифференциатора, делителя, инвертирующего усилителя и блока умножения, в режиме подхода к точке позиционирования вырабатывается качественно новый сигнал управления Уз, подаваемый на исполнительный двигатель. На фазовой плоскости режим подхода к точке позиционирования (третий режим), обеспечиваемый данным сигналом управления Кз,
соответствует прямой ВО (фиг.2). В результате обеспечивается высококачественный процесс позиционирования с заданной точностью, которая не зависит от изменения параметров САР в широком диапазоне в
третьем режиме.
Действительно, пусть корректируемая система описывается передаточной функцией,„, ,п, U4fP)K4
W4(P) wf P(T4-p-+T)
0)
где K/i и ТА - соответственно коэффициент усиления и постоянная времени исполнительного двигателя с нагрузкой на валу.
Для того, чтобы движение системы (1) на фазовой плоскости описывалось прямой ВО (фиг.2) необходимо выполнение условия
.(2)
где (2) - уравнение прямой ВО, k - тангенс угла наклона прямой ВО к оси О Е, е и е - фазовые координаты, где е-сигнал ошибки.
Можно записать
)4,
где G - входное ступенчатое воздействие, U4 - сигнал на выходе корректируемой системы (1). Дважды продифференцируем по времени левую и правую части уравнения (3)
e G-U4 -Lk U4 -e E k (4)
U4-e k -kl)4.(5)
То есть уравнение прямой ВО (2) можно представить в виде (5).
Найдем сигнал управления Us, который обеспечивает корректируемой системе (1) движение, описываемое по прямой ВО на фазовой плоскости.
Дифференциальное уравнение, характеризующее поведение системы, с учетом выражения (1), примет вид
T4U4 + U4 K4U3,(6)
где Ua - выходной сигнал суммирующего устройства. В третьем режиме значение сигнала Уз определяется выражением
U3 U4K5+Ui9,(7)
где Ks - коэффициент передачи датчика ско- рости 5, U19 сигнал на выходе нелинейного корректирующего устройства. В третьем режиме Uig Ui7, где Ui - сигнал на выходе блока умножения. Если выполнить условие Ks 1/K4, и подставить уравнение (7) в вы- ражение (6), то получим
T4U4 K4U19.(8)
Решая совместно уравнение (5) и (8) относительно Uig получим
Ul9-b H(9)
С учетом (2) и (4) уравнение (9) можно переписать
Т4-62
U191
(10)
К4 Ј
Физически сигнал Dig (Ю), обеспечивающий корректируемой системе (1) линейный режим при подходе к точке позиционирования, можно реализовать при использовании следующих блоков: дифференциатора, делителя, инвертирующего усилителя с коэффициентом передачи - Т4/К4, и блока умножения.
Подставляя (10) в (7), получим сигнал управления 1)з, который необходимо подать на исполнительный двигатель, чтобы движение системы (1) на фазовой плоскости происходило по прямой ВО
5
10
15
20
25
30 35
4°
Ua U4 К5 Т4-6
(11)
45
К4 Ј
Из (11) видно, что сигнал управления Уз, подаваемый на исполнительный двигатель в третьем режиме, зависит от величины тангенса угла наклона К е/Б прямой ВО к оси О е. Причем величина К вычисляется аппа- ратно как текущее значение с момента перехода корректирующего устройства в третий режим. Поэтому вне зависимости от того, в каком положении на фазовой плоскости находилась изображающая точка в момент перехода в третий режим работы, ее движение в этом режиме будет осуществляться по прямой, соединяющей данную точку с началом координат - точкой О. В результате обеспечивается высокое качество переходного процесса (перерегулирование отсутствует), и заданная точность, независящая от изменения параметров корректируемой САР в широком диапазоне и момента переключения на третий режим, который выбирается в зависимости от требуемого быстродействия.
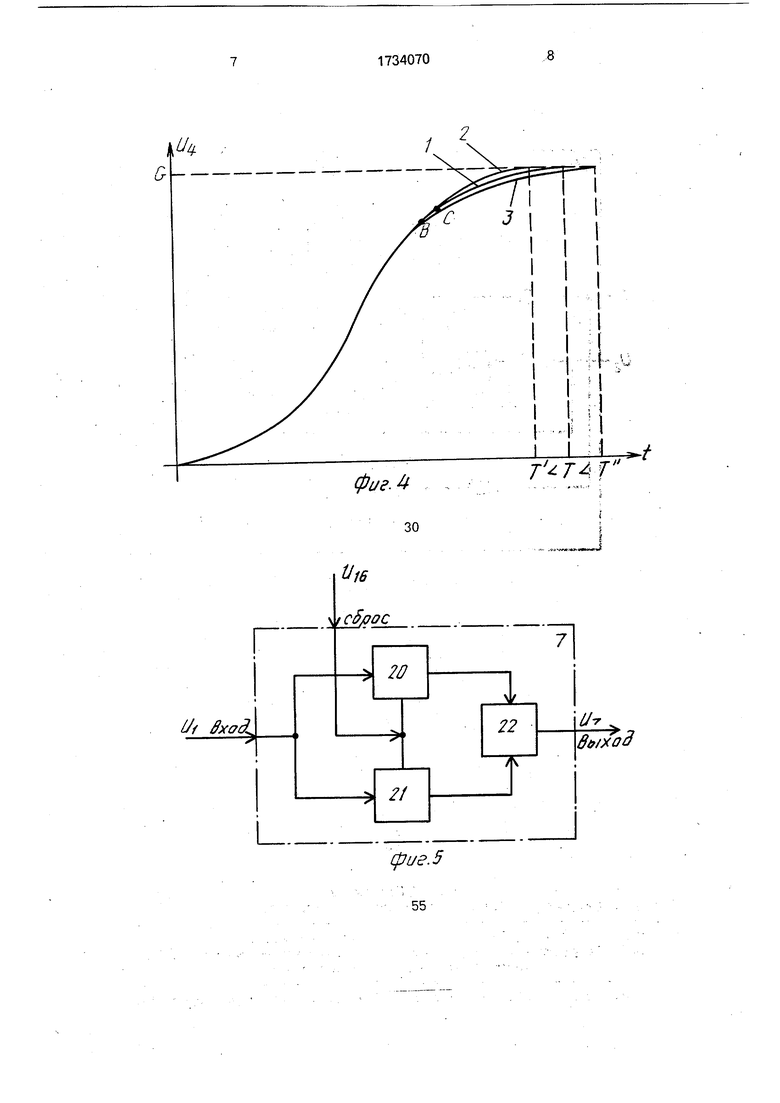
На фиг.1 представлена блок-схема предлагаемого нелинейного корректирующего устройства в составе САР; на фиг.2 - фазовые траектории, характеризующие работу корректирующего устройства с учетом изменения параметров корректируемой САР в третьем режиме; на фиг.З - кривые переходного процесса, характеризующие изменение выходной координаты корректируемой САР с учетом изменения ее параметров в третьем режиме при использовании прототипа в качестве корректирующего устройства; на фиг.4 - кривые переходного процесса, характеризующие изменение выходной координаты корректируемой САР с учетом изменения ее параметров в третьем режиме при использовании предлагаемого нелинейного корретирующего устройства; на фиг.5 - структурная схема двухстороннего пикового детектора; нафиг.6- принципи
50
альная электрическая схема делителя.
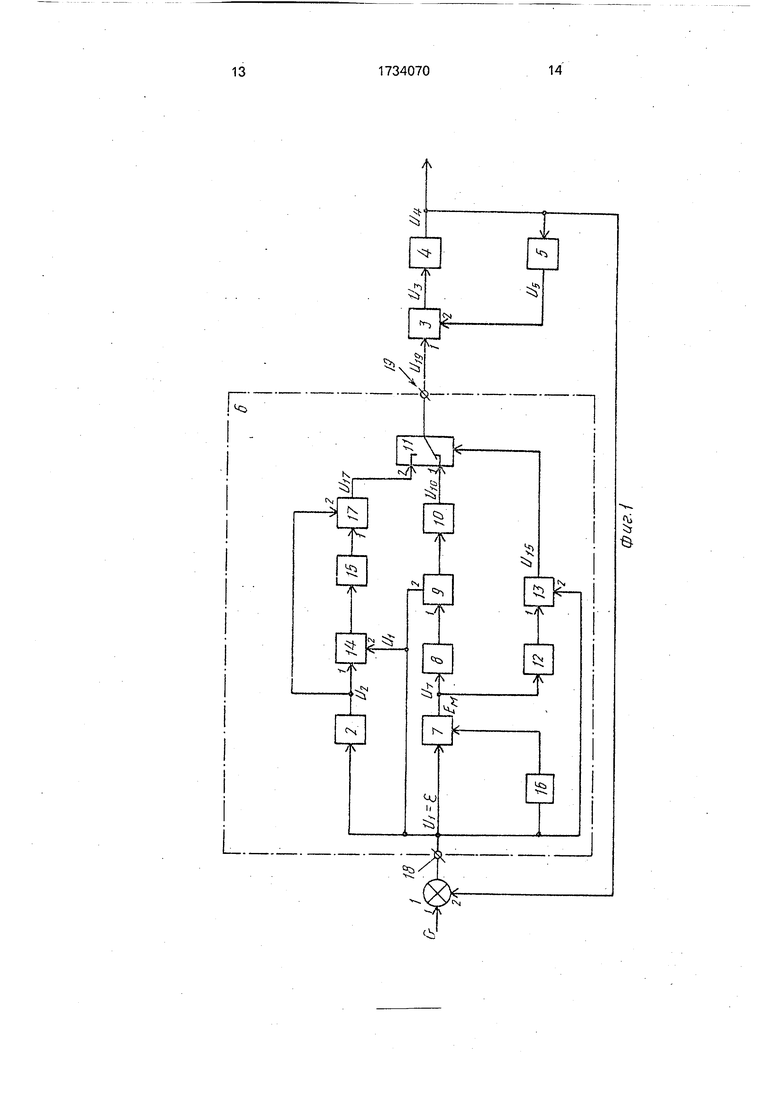
На фиг.1 приняты следующие обозначения: измеритель рассогласования 1, дифференциатор 2, суммирующее устройство 3, исполнительный двигатель 4 с нагрузкой, датчик скорости 5, нелинейное корректирующее устройство 6, пиковый детектор 7, первый масштабирующий блок 8, первый сумматор 9, сигнум-реле 10, переключатель 11, второй масштабирующий блок 12, второй сумматор 13, делитель 14, инвертирующий усилитель 15, нуль-орган 16, блок умножения 17, 18 и 19 - соответственно вход и выход нелинейного корректирующего устройства 6, G - входное ступенчатое
воздействие, Uj - выходной сигнал i-ro функционального блока.
Пиковый детектор 7 выполнен двусторонним, построенным на базе двух односторонних пиковых детекторов положительных и отрицательных значений, объединенных по выходу сумматором. Структурная схема двустороннего пикового детектора приведена на фиг.5, где 20 - пиковый детектор положительных значений, 21 - пиковый детектор отрицательных значений, 22-сумматор. Входы пиковых детекторов положительных и отрицательных (20 и 21) значений объединены и являются входом двухстороннего пикового детектора 7. Выход сумматора 22, к входам которого подключены выходы пиковых детекторов 20 и 21, является выходом двухстороннего пикового детектора 7. Пиковые детекторы положительных 20 и отрицательных 21 значений имеют общую цепь сброса.
Делитель 14 построен по методу переменной крутизны. Принципиальная электрическая схема делителя приведена на фиг.6. Делитель содержит резисторы, транзисторы, операционные усилители, общую шину.
Дифференциатор 2 может быть собран на операционном усилителе. Инвертирующий усилитель 15 также может быть собран на операционном усилителе.
Рассмотрим работу нелинейного корректирующего устройства в составе САР. Коэффициент передачи Кв первого масштабирующего блока 8 выбираем равным 0,5, что обеспечивает необходимое положение линии переключения с режима разгона на режим торможения (фиг.2, точка А).
Величину коэффициента передачи второго масштабирующего блока 12, обуславливающую переход САР в третий режим с режима торможения, выбираем равной 0,05(Кг2 0,05).
Устройство работает следующим образом.
Пиковый детектор 7 запоминает экстремальное значение сигнала рассогласования Ui, формирует на своем выходе сигнал U и хранит его до прихода сигнала на сброс с выхода нуль-органа 16. В блоках масштабирования 8 и 12 значение сигнала U уменьшается соответственно в 2 и 20 раз и сравнивается в сумматорах 9 и 13 с текущим значением сигнала UL В зависимости от результатов сравнения возможны 3 режима работы устройства.
В первом режиме работы выполняется условие U /Ui/ 0,5 U. В этом случае выходные сигналы сумматоров 9 и 13 положительны и переключатель 11 замкнут на
свой второй вход, а сигнум-реле через переключатель 11 формирует на выходе корректирующего устройства 6 положительный ступенчатый сигнал требуемой величины, которая определяется исходя из конкретных параметров системы автоматического регулирования. Сигнал Un поступает на первый вход суммирующего устройства 3. На второй вход суммирующего устройства 3 подается выходной сигнал Us датчика скорости 5. В результате суммирования на выходе суммирующего устройства 3 образуется управляющее воздействие Us, обеспечивающее оптимальный разгон
исполнительного двигателя 4 (фиг.2, кривая NA). Во втором режиме работы, когда 0,05 U /Ui/ 0,5 U выходной сигнал Ug первого сумматора 9 становится отрицательным, а выходной сигнал 1Нз второго
сумматора 13 остается положительным, поэтому переключатель 11 продолжает находиться в прежнем состоянии, на выходе сигнум-реле 10 формируется отрицательный ступенчатый сигнал Uio определенной
величины. В результате управляющее воздействие Us на выходе суммирующего устройства 3 обеспечивает оптимальное торможение исполнительного двигателя 4 (фиг,2, кривая АВ).
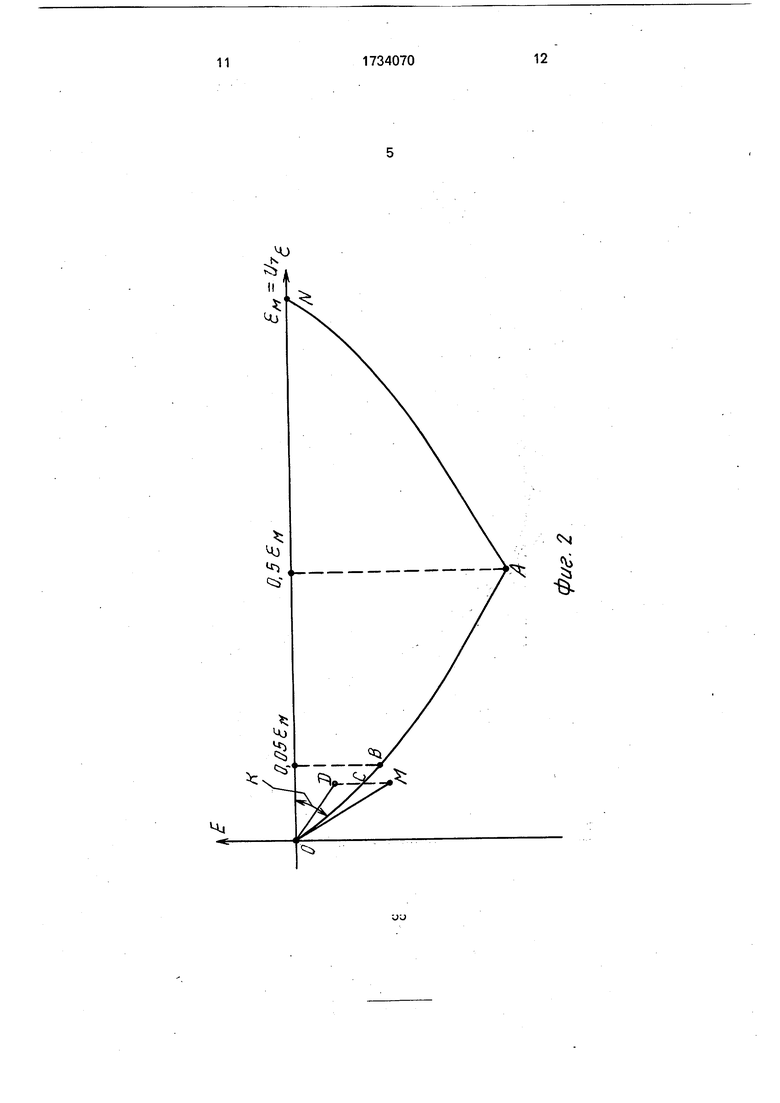
Третий режим возникает при подходе к точке позиционирования и характеризуется соотношением 0 /Ui/ 0,05 U. В этом режиме выходной сигнал второго сумматора становится отрицательным и переключатель 11 отсоединяет свой выход от второго входа и подсоединяет его к первому входу, пропуская на свой выход сигнал Ui с выхода усилителя 17. Корректирующее устройство в этом случае обеспечивает апериодический процесс высокого качества без перерегулирования. Отработка данного режима характеризуется заданной точностью позиционирования, которая не зависит от изменения параметров корректируемой системы в широком диапазоне. На фазовой плоскости он соответствует прямой ВО (фиг.2). Рассмотрим поведение корректирующей системы при изменении постоянной времени ТА исполнительного двигателя 4 в
третьем режиме (точка С фиг.2).
Пусть постоянная времени ТА уменьшилась на 25%, т.е.
T4-JT4,
(12)
тогда дифференциальное уравнение (8), описывающее поведение корректируемой системы, будет иметь вид
T4U4 K4Ui9.(13)
С учетом (12), (5) и (9) уравнение (13) можно переписать
|T4U4 K,(14)
ИЛИ
1)4 KU4.(15)
В результате уменьшения постоянной времени Т4 тангенс угла наклона К1 прямой ВО к оси О Ј увеличивается. Из (5) и (15) следует, что
(16)
K U4/U4 K.
В данном случае третьему режиму на фазовой плоскости соответствует ломаная ВСМО (фиг.2). Аналогично можно показать, что при увеличении постоянной времени Т4 тангенс угла наклона прямой, соответствующий третьему режиму, уменьшается (ломаная ВСДО на фиг.2).
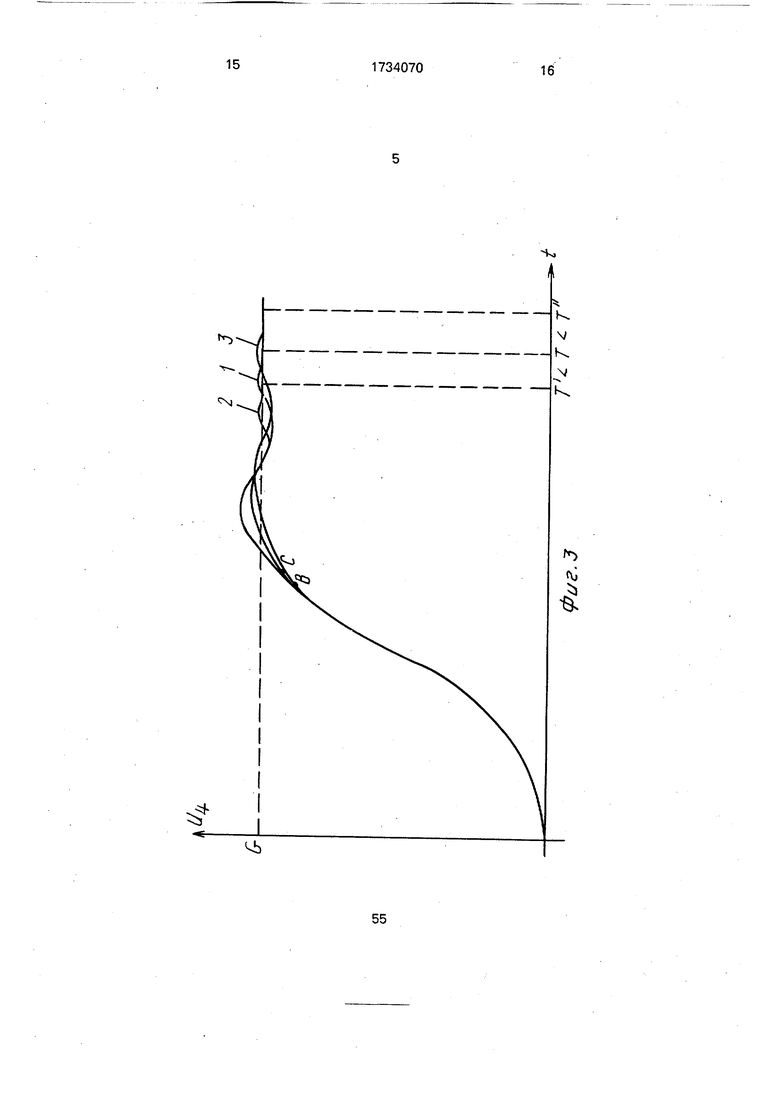
На фиг.4 кривая 1 - соответствует переходному процессу корректируемой САР при постоянстве ее параметров; кривая 2 - при уменьшении постоянной времени Т4 в третьем режиме (точка С фиг.2); кривая 3 - при увеличении Т4 в третьем режиме (точка С фиг.2).
Как видно из фиг.4 изменение постоянной времени Т4 двигателя 4 в третьем режиме в случае использования предлагаемого нелинейного корректирующего устройства отражается только на быстродействии корректируемой САР и то незначительно (Т1 Т Т ). При уменьшении Т4 быстродействие увеличивается (кривая 2), при увеличении Т4 быстродействие уменьшается. Точность же остается заданной и в этом и в другом случае, а перерегулирование отсутствует.
На фиг.З приведены кривые переходного процесса в аналогичных случаях при использовании в качестве корректирующего устройства - прототипа. Видно, что изменение постоянной времени Т4 в третьем режиме влияет как на быстродействие, так и на точность корректируемой САР, а также на величины перерегулирования.
Изменение коэффициента усиления К двигателя 4 в третьем режиме при исполь: зовании предлагаемого корректирующего устройства также не отражается на заданной точности. Изменяется только быстродействие корректируемой САР, причем эффект обратный: при увеличении К4 - быстродействие увеличивается, при уменьшении К4 - уменьшается.
Таким образом, использование предлагаемого нелинейного корректирующего устройства позволяет получить качественно новый - линейный режим подхода к точке
позиционирования, характеризующийся высоким качеством (перерегулирование отсутствует) и заданной точностью, которая не зависит от изменения параметров коррек- тируюемой САР в широком диапазоне. Указанные свойства предлагаемого нелинейного корректирующего устройства обуславливает не только технический, но и экономический эффект.
Формула изобретения
Нелинейное корректирующее устройство, содержащее последовательно соединен- ные пиковый детектор, вход которого является входом устройства, первый масштабирующий блок, первый сумматор, сигнум-реле, выход которого соединен с первым информационным входом переключателя, выход которого является выходом устройства, последовательно соединенные
второй масштабирующий блок и второй сумматор, выход которого соединен с управляющим входом переключателя, а второй вход соединен с входом устройства, с вторым входом первого сумматора и с входом нульоргана, выход которого соединен с управляющим входом пикового детектора, соединенного выходом с входом второго масштабирующего блока, отличающее- с я тем, что, с целью повышения точности, в
него введены последовательно соединенные дифференциатор, делитель, инвертирующий усилитель и блок умножения, причем выход блока умножения подсоединен к второму информационному входу переключателя, второй его вход соединен с выходом дифференциатора, вход которого соединен с входом устройства и вторым входом делителя.
/V
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1635160A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1576881A2 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022312C1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |

Изобретение относится к двухканаль- ным нелинейным корректирующим устройствам (НКУ) и предназначено для повышения точности и качества обеспечиваемого им процесса позиционирования с учетом изменения параметров корректируемых систем автоматического регулирования (САР). Введение НКУ дифференциатора, делителя, инвертирующего усилителя и блока умножения позволяет получить качественно новый режим подхода к точке позиционирования, v характеризующийся отсутствием перерегулирования и заданной точностью, которая не зависит от момента перехода в данный режим и от изменения параметров в корректируемой САР в широком диапазоне. 6 ил.
I
Ј
4
F
.V-
ni
&
Г
фиеЛ
выхаЗ
срие.5
1 U
Ufii,
и
L-db и;
. J
Фиг.6
| Авторское свидетельство СССР № 915060, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
