Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022312C1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1635160A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ДЛЯ РЕСУРСНЫХ ИСПЫТАНИЙ КОНСТРУКЦИЙ | 1988 |
|
SU1646410A1 |
Использование: в системах автоматического управления. Цель: повы- шение точности и качества обеспечиваемого им позиционирования с учетом изменения параметров корректируемых систем автоматического управления до третьего порядка включительно. Сущность: устройство содержит управляемый дифференциатор, усилитель, два блока деления, ключ, три сумматора, выход нелинейного корректирующего устройства, дифференциатор, блок умножения, переключатель, пиковый детектор, два масштабирующих блока, сигнум-реле, нуль-орган . 3 ил.
Изобретение относится к автоматическому регулированию, к классу двухканальных нелинейных корректирующих устройств и может быть использовано в быстродействующих системах позиционирования для третьего порядка включительно, например станков с программным управлением, приводов роботов-манипуляторов, высококачественных следящих установок, а также в тех системах автоматического регулирования (САР), где требуется высокая точность и надежность с учетом изменения их параметров в процессе работы.
Известно нелинейное корректирующее устройство, содержащее нуль - орган, последовательно соединенные усилитель , блок выделения модуля
и блок умножения, последовательно соединенные второй сумматор, пиковый детектор, первый масштабируемый блок, первый сумматор, сигнум-реле, формирователь импульсов, блок задержки и элемент ИЛИ, последовательно соединенные ключ и второй масштабирующий блок, подключенный выходом к второму входу второго сумматора, первым Входом подключенного к вход усилителя, к второму входу первого сумматора, к сигнальному входу ключа и к входу нуль- органа, выходом подключенного к второму входу элемента ИЛИ, первым входом подключенного к управляющему входу ключа, выход сигнум-реле подключен к второму входу блока умножения.
VI
(Л
ел го ел ел
31
Недостатком известного устройства является его низкое быстродействие Введение такого устройства в систему автоматического регулирования приводит к тому, что коэффициент демпфирования системы зависит от величины сигнала рассогласования и возрастает с ее уменьшением, обеспечивая высокое быстродействие в начале переходного процесса и апериодическое движение на участке установления вблизи точки позиционирования. Однако, устройство не обеспечивает в системе оптимального режима разгона и торможения с максимально возможным ускорением, так как для этого необходимо иметь нулевой коэффициент демпфирования в течение всего переходного процесса. Увеличение коэффициента усиления устройства для повышения быстродействия приводит к появлению в системе колебательных процессов. Устройство также сложно в настройке.
Известно также нелинейное корректирующее устройство, содержащее последовательно соединенные пиковый детектор, первый масштабирующий блок первый сумматор, сигнум-реле, выход которого подключен к второму CHI- нальному входу первого переключате
второй масштабирующий блок и второй сумматор, вторым входом подключен- ный к второму входу первого суммато и к входу нуль-органа, выходом подключенного к управляющему входу пикового детектора, источник постоянного напряжения и первый и второй переключатели, управляющие входы которых подключены к выходу второго сумматора, первые сигнальные входы к второму входу второго сумматора и к сигнальному входу пикового детектора, выходом подключенного к входу второго масштабирующего блока, второй сигнальный вход второ го переключателя подключен к выходу источника постоянного напряжения, выход второго переключателя соединен с входом усилителя, выход которого является вторым -выходом устройства, выход первого переключателя является первым выходом устройства, а сигнальный вход пикового детектора является входом устройства
0
5
5
0
Это нелинейное корректирующее устройство улучшает известное устройство по быстродействию, так как формирует управляющий сигнал таким образом, что компенсирует ЭДС исполнительного двигателя, обеспечивая его разгон и торможение с максимально возможным ускорением при заданных параметрах САР,
Недостатки известного корректирующего устройства заключаются в низкой точности позиционирования, наличии перерегулирования в устройстве, в.повышенной энергоемкости. Устройство также не может быть использовано в САР выше второго порядка .
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовательно соединенные пиковый детектор, первый масштабирующий блок, первый сумматор, сигнум-реле, выход которого подключен к второму сигнальному входу первого переключателя (переключателя), последовательно соединенные второй масштабирующий блок и второй сумматор, вторым входом подключенный к второму входу первого сумматора, сигнальному входу пикового детектора и входу нуль-орга50 5 5
0
на, выходом подключенного к управляющему входу пикового детектора, последовательно соединенные второй переключатель и первый усилитель, управляющие BXO/DSI первого переключателя (переключателя) и второго переключателя подключены к выходу второго сумматора, второй сигнальный вход второго переключателя подключен к выходу источника постоянного напряжения, последовательно соединенные управляемый дифференциатор, второй усилитель
(усилитель), блок деления (первый блок деления), ключ и третий сумматор, второй вход которого соединен с выходом первого переключателя, а выход является информационным выходом устройства (выходом устройства), управляющий вход ключа соединен с выходом нуль-органа и первым управляющим входом управляемого дифференциатора, сигнальный вход которого является первым входом устройства, а второй управляющий вход подключен к выходу сигнум-реле, выход пикового детектора соединен
со вторым входом I первого) блока деления и вторым масштабирующим блоком, сигнальный вход пикового детектора является вторым входом устройства, выход первого усилител является выходом управления нелинейного корректирующего устройства
Данное корректирующее устройств устраняет некоторые недостатки известного устройства. Повышается точность, уменьшается перерегулироние в устройстве за счет того, что сигнал задания заранее дифференцируется в управляемом дифференциато режим работы которого зависит от знака суммы сигнала рассогласовани и его экстремального значения и от выходного сигнала нуль-органа„ Продифференцированный сигнал усиливается, делится ни экстремальное значение сигнала рассогласования и периодически подается с выхода нелинейного корректирующего устройва на вход двигателя с нагрузкой„ Данное устройство, в отличие от известного,может также использоваться в системах третьего порядка
Недостатки известного корректирующего устройства заключаются в сложности выбора момента перехода в режим, который возникает при подходе к точке позиционирования (третий режим), когда кинетическая энергия уже погашена предыдущим режимом торможения. Неудачный выбо момента перехода в третий режим приводит к затягиванию переходного процесса и ухудшению динамической точности. Обычно момент перехода в третий режим определяют экспериментально, что связано со значительными трудностями . В случае удачного выбора момента перехода в третий режим система переходит в устойчивый установившийся режим, обеспечивающий заданное качество процесса позиционирования только при постоянстве заданных параметро системы (коэффициента усиления и постоянной времени). Увеличение коэффициента усиления также как и уменьшение постоянной времени в третьем режиме неизбежно вызывает перерегулирование, а уменьшение коэффициента усиления также как и увеличение постоянной времени приводит к затягиванию переход
to
20
25
, is 7552556
j ного процесса и также снижению динамической точности.
Цель изобретения - повышение точ ности устройства, в результате чего повысится качество процесса позиционирования с учетом изменения параметров САР.
Поставленная цель достигается тем, что в нелинейное корректирую- щее устройство, содержащее последовательно соединенные пиковый детектор, первый масштабирующий блок, первый сумматор и сигнум-реле, выходом подключенное к первому информационному входу переключателя, второй сумматор, соединенный первым входом с выходом второго масштабирующего блока, вторым входом со вторым входом первого сумматора, с информационным входом пикового детектора и со входом нуль-органа, а выходом - с управляющим входом переключателя, последовательно соединенные управляемый дифференциатор, усилитель, первый блок деления, ключ и третий сумматор, второй вход которого соединен с выходом переключателя, а выход является выходом устройства, управляющий вход ключа соединен с выходом нуль-органа, с управляющим входом пикового детектора и с первым управляющим входом управляемого диф- 35 ференциатора, информационный вход которого является гтервым входом устройства, а второй управляющий вход подключен к выходу сигнум- реле, выход пикового детектора сое30
40
динен со входом делитель первого
блока деления и со входом второго масштабирующего блока, информационный вход пикового детектора является вторым входом устройства, дополнительно введены последовательно соединенные дифференциатор, второй блок деления и блок умножения, подключенный вторым входом к выходу дифференциатора , а выходом - ко второму
информационному входу переключателя, вход делитель второго блока деления соединен со входом дифференциатора и с информационным входом пикового детектора.
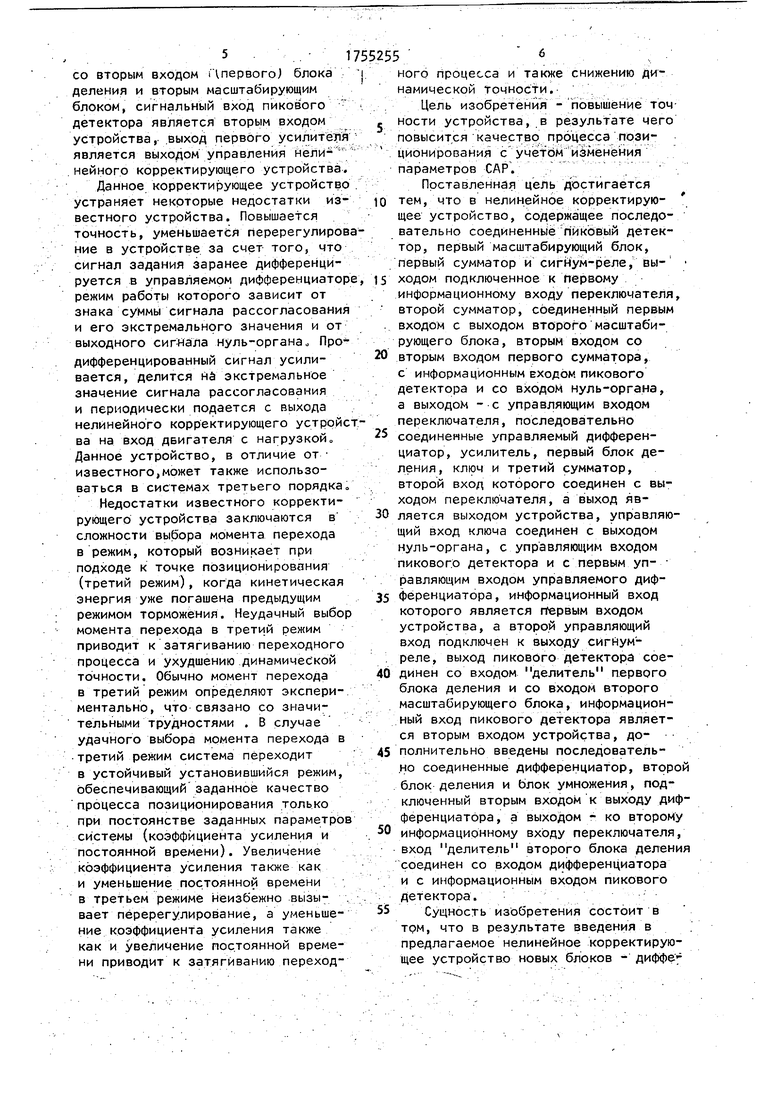
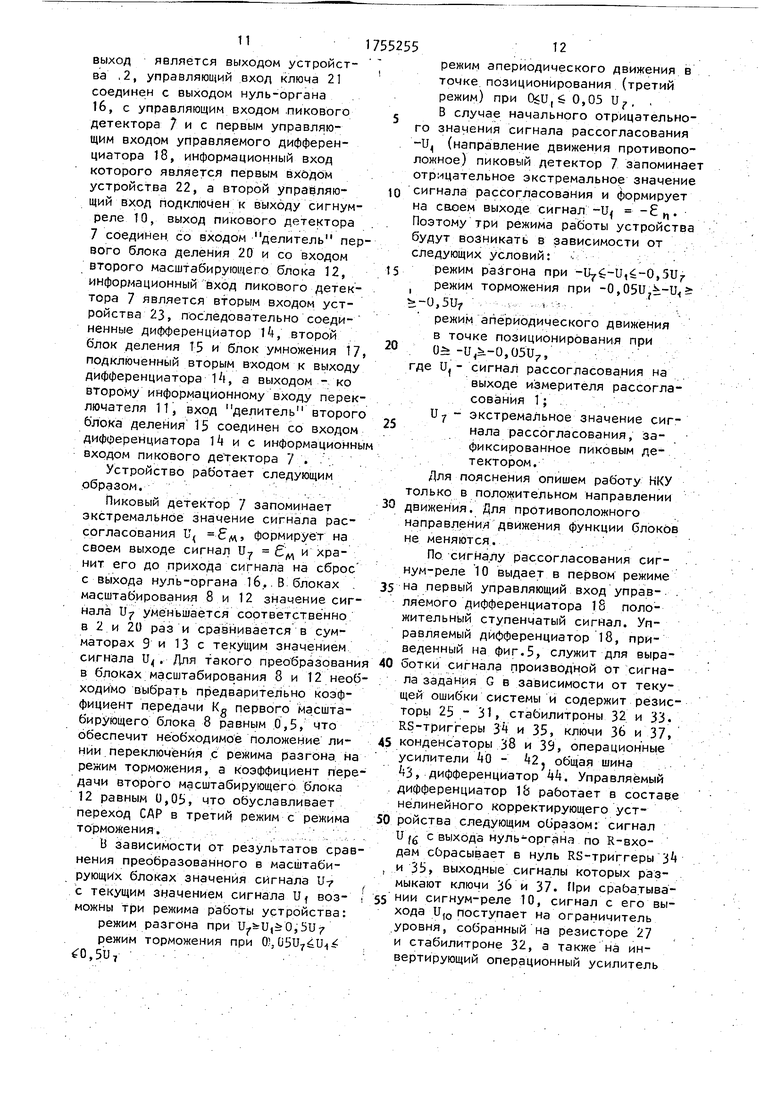
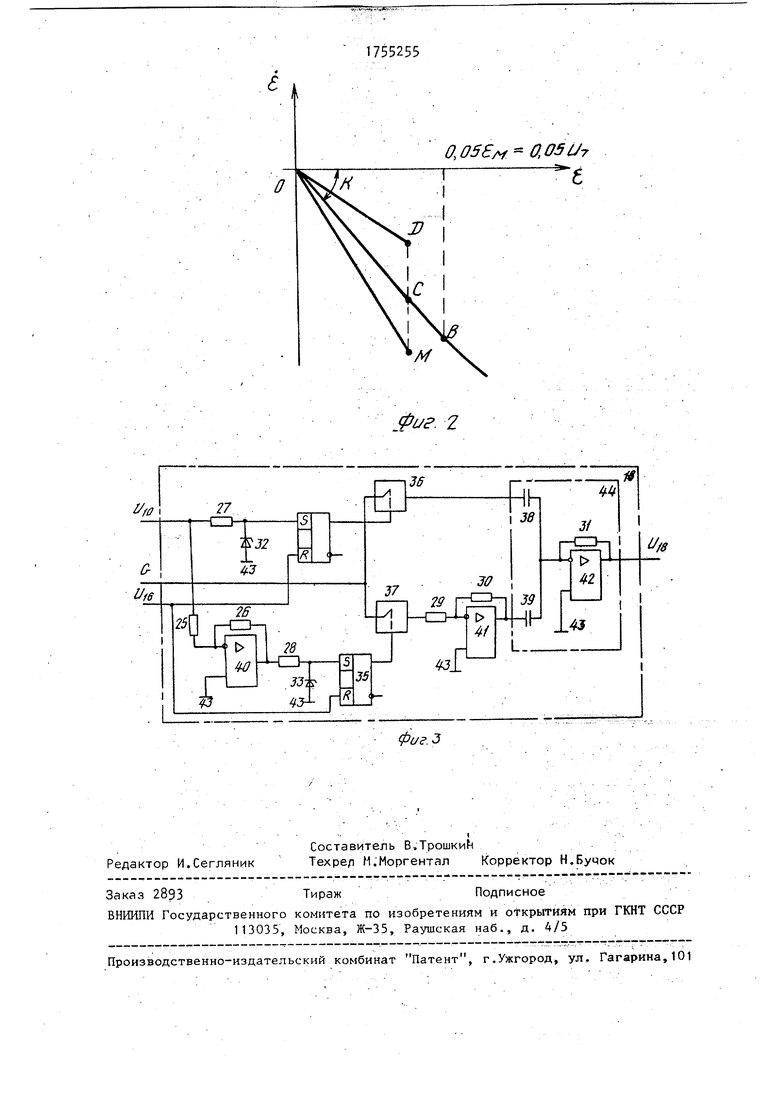
Сущность изобретения состоит в том, что в результате введения в предлагаемое нелинейное корректирующее устройство новых блоков - диффе ренциатора, второго блока деления и блока умножения, в режиме подхода к точке позиционирования (третьем режиме) вырабатывается качественно новый сигнал управления Uj, подаваемый на исполнительный двигатель. На фазовой плоскости третий режим, обеспечиваемый данным сигналом управления и, соответствует прямой ВО (фиг.2). В результате корректируемой системе обеспечивается высококачественный процесс позиционирования с заданной точностью, котора не зависит от изменения параметров САР в широком диапазоне в третьем режиме.
Действительно, пусть исполнительный двигатель k с нагрузкой (фиг.1) описывается передаточной функцией:
w4(p)
U4(p)К +
:U3(pf Р(тмрн)(тйРи)
РСтятмРМтя ЫР40
где К , - коэффициент усиления исполнительного двигателя (4 с нагрузкой на валу; Т и Тд,- соответственно электромам-
нитная и электромеханическая постоянная времени двигателя с нагрузкой на валу (фиг.1).
Для того, чтобы движение системы (1) на фазовой плоскости описывалось прямой ВО (фиг.2) необходимо выполнение условия
-Ё е-к,
где (2) - уравнение прямой ВО;
К - тангенс угла наклона прямой
ВО к оси Ос, Ји Ј - фазовые координаты, где
Ј сигнал ошибки. Можно записать
6 С 1,
где G - входное ступенчатое воздействие;
U. - сигнал на выходе корректируемой системы (1).
Дважды продифференцируем по времени левую и правую части уравнения (3)
8
и учтем выражение (2). Тогда получим
я
я
й
с G - 1Ь -и„
U,
о ij - U4 UQ -6 Ј К (4) U4 g K -K-U4 (5)
Уравнение прямой 1)0 (2) можно представить в виде (5).
Найдем сигнал управления Ur который обеспечивает корректируемой системе 10 (1) движение, описываемое попрямей ВО на фазовой плоскости.
Дифференциальное уравнение, характеризующее поведение системы, с учетом выражения (1), примет вид:
к и3 тйтмиф +(тя+тм) и 4 + v (6)
где выходной сигнал суммирующего устройства 3 (фиг.1). Обычно для систем малой мощности
20 величина , очень мала. Кроме того, в общем случае при подходе к точке позиционирования скорость, ускорение, а тем более их производные очень малы, поэтому величиной
25 LjTM U4 в третьем режиме можно
пренебречь, и дифференциальное уравнение (b) рассматривать как дифференциальное уравнение второго порядка
30 K4U3 (ТЯ + V и4 + U4 ; (7)
В третьем режиме значение сигнала U определяется выражением
U3 U2;
(8)
35
где К ,. - коэффициент передачи датчика скорости 5 (фиг.1); U - сигнал на выходе нелинейного корректирующего устройства.
В третьем режиме Uz U17 , где 40 U 1 сигнал на выходе блока умножения 17 Если выполнить условие К 1/K.j., и подставить уравнение (8) в выражение (7), то получим
45 UZK4 (ТЯ+ТМ) U4. (У)
Решая совместно уравнения (b) и (9) относительно U2 получим
U,
)ку± (1
К
0)
С учетом (2) и (0 уравнение (9) можно переписать
U,
JlaiTfllJLi
к4е
(11)
Физически сигнал U2 (10), обеспечивающий корректируемой системе (1) линейный режим при подходе к точке позиционирования, можно реа
лизовать при использовании следующих блоков: дифференциатора с коэффи(Та + Тм)
циентом передачи К,
второго блока деления и блока умножения.
Подставляя (11) в (8), получим сигнал управления U5, который необходимо подать на исполнительный двигатель, чтобы движение системы (1) на фазовой плоскости происходило по прямой ВО.
UH К«
-iIiiT) (1
К4 Ј
2)
Из (12) видно, что сигнал управления и,, подаваемый на исполнительный двигатель в третьем режиме зависит от величины тангенса угла наклона К Ј/Ј прямой ВО к оси Об. Причем величина К вычисляется аппарат- но как текущее значение с момента перехода корректирующего устройства в третий режиме. Поэтому вне зависимости от того, в каком положении на фазовой плоскости находились изображающая точка в момент перехода в третий режим работы, ее движение в этом режиме будет осуществляться по прямой, соединяющую данную точку с началом координат - точкой 0. В результате обеспечивается высокое качество переходного процесса (перерегулирование отсутствует), и заданная точность, независящая от момента переключения на третий режим который выбирается в зависимости от требуемого быстродействия.
Предлагаемое нелинейное корректирующее устройство отличается от известного наличием новых блоков. Таким образом, преллагаемое устройство соответствует критерию новизна.
Сравнение предлагаемого решения с другими техническими решениями показывает, что данные блоки известны. Однако, при их введении в указанной связи с другими i блоками в нелинейном корректирующем устройстве, указанные блоки обуславливают новые свойства, что приводит к возможности организации линейного движения на фазовой плоскости при подходе к точке позиционирования. Это позволяе сделать вывод о соответствии технического решения ные отличия с
критерию существен
5
0
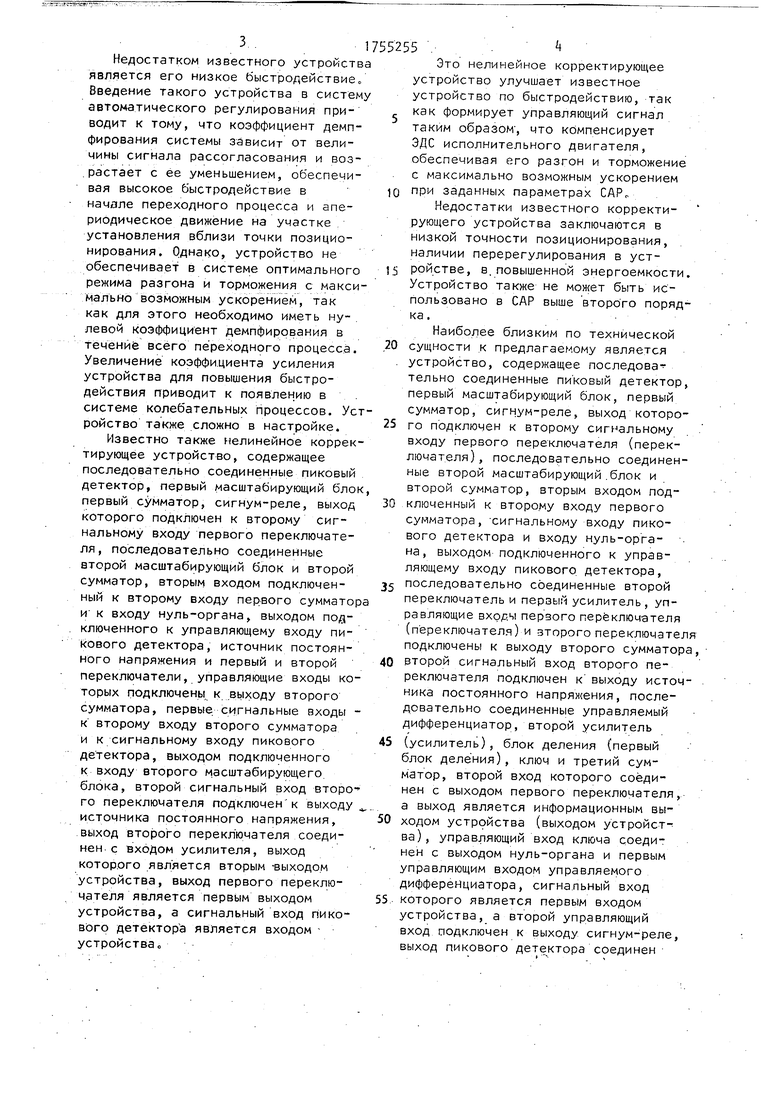
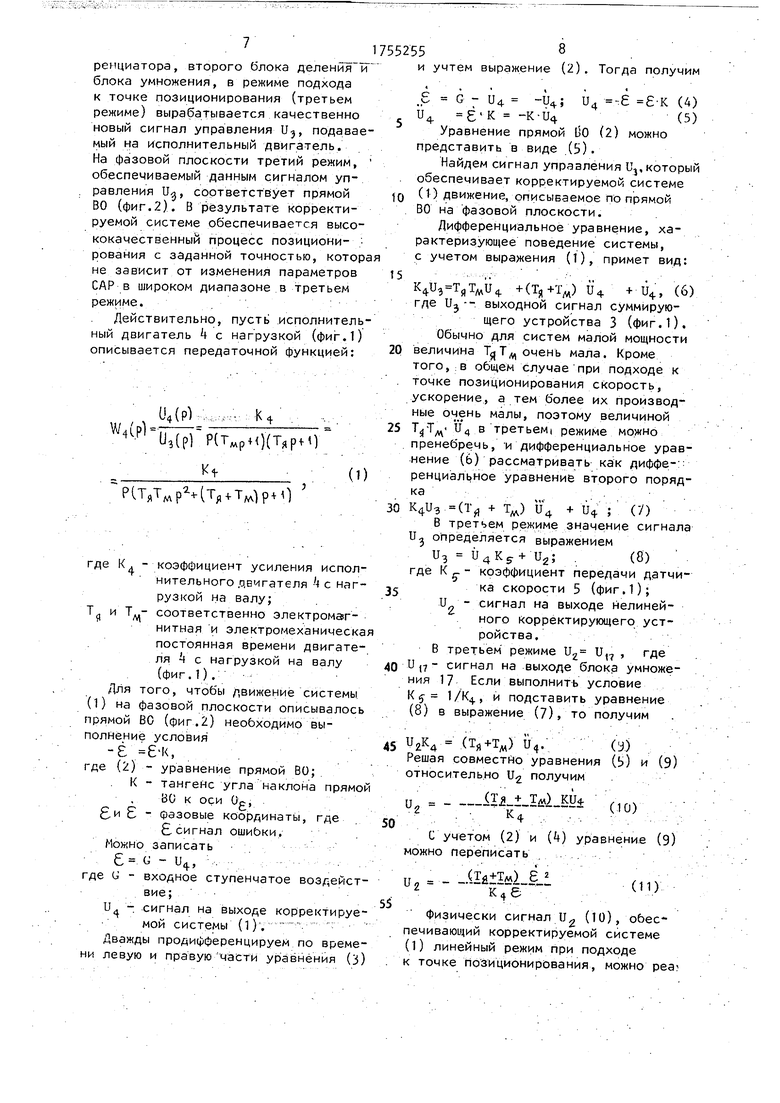
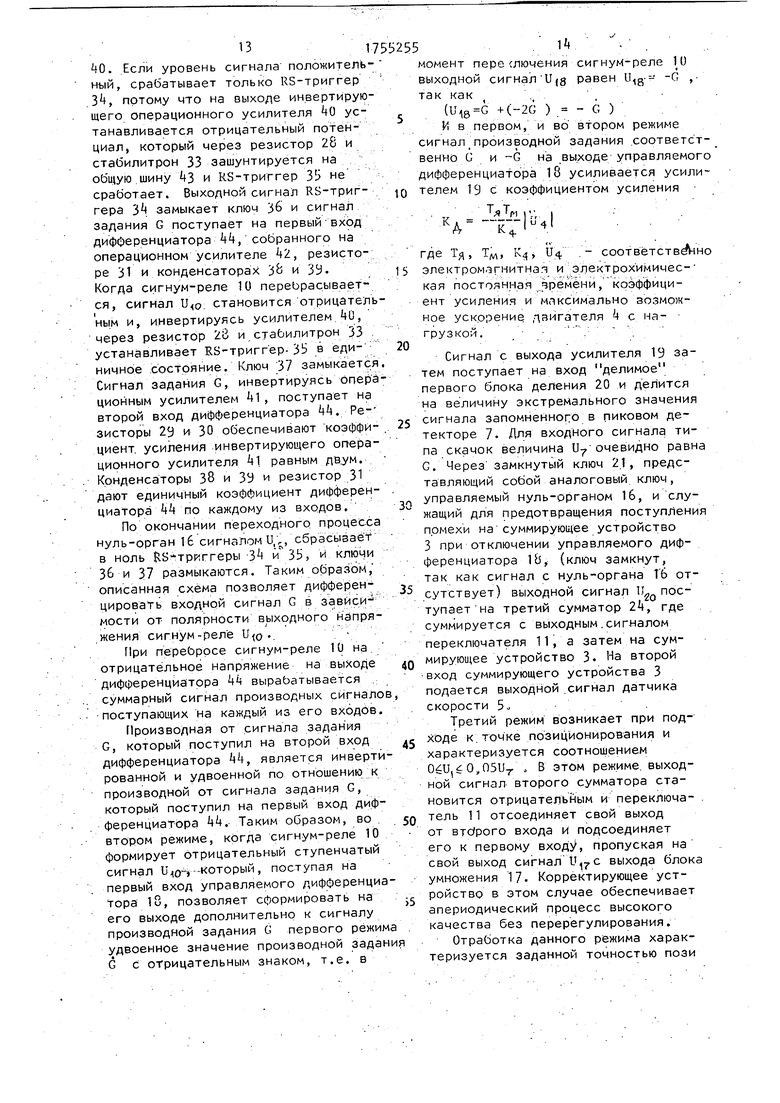
На оиг. представлена блок-схема предлагаемого нелинейного корректирующего устройства в составе САР; на фиг.2 - фазовые траектории тре- ( тьего режима, характеризующие работу корректирующего устройства с учетом изменения параметров корректируемой САР; на фиг.З - принципиальная электрическая схема управляемого дифференциатора.
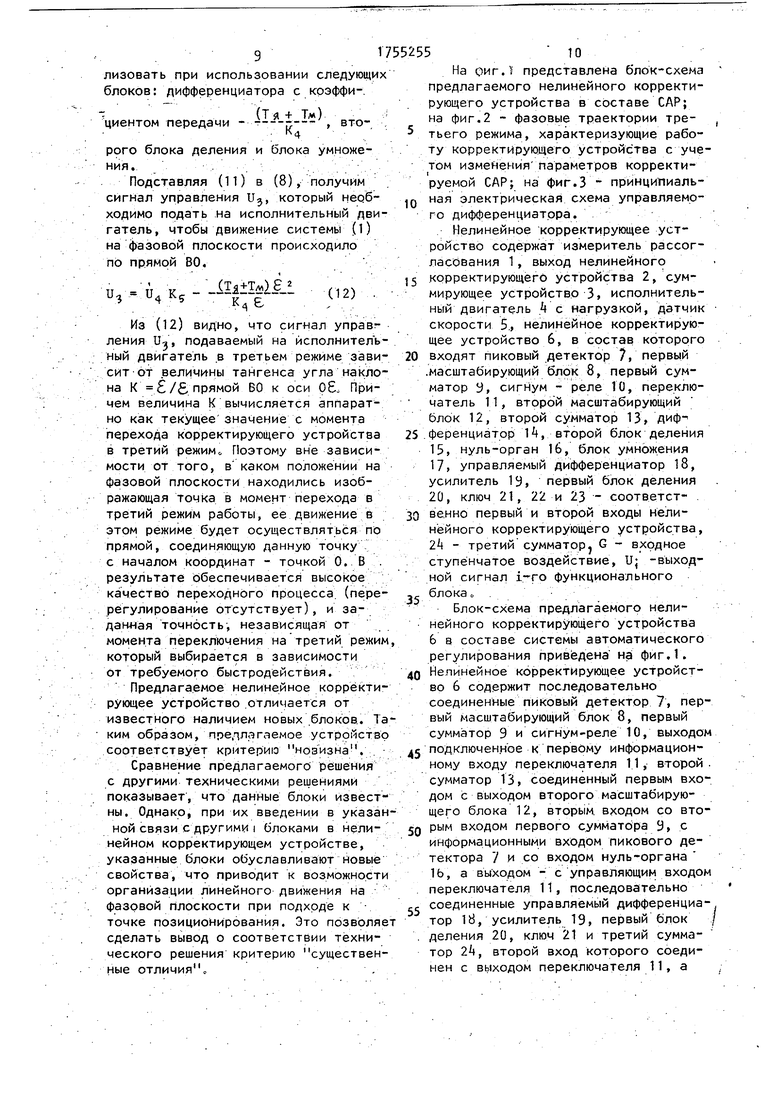
Нелинейное корректирующее устройство содержат измеритель paccoi- ласования 1, выход нелинейного корректирующего устройства 2, суммирующее устройство 3, исполнительный двигатель 4 с нагрузкой, датчик скорости 5, нелинейное корректирующее устройство 6, в состав которого входят пиковый детектор 7, первый .масштабирующий блок 8, первый сумматор У, сигнум - реле 10, переключатель 11, второй масштабирующий блок 12, второй сумматор 13, диф5 ференциатор 14, второй блок деления 15, нуль-орган 16, блок умножения 17, управляемый дифференциатор 18, усилитель 1у, первый блок деления 20, ключ 21, 22 и 23 - соответственно первый и второй входы нелинейного корректирующего устройства, 24 - третий сумматор, G - входное ступенчатое воздействие, U; -выходной сигнал 1-го функционального блока„
Блок-схема предлагаемого нелинейного корректирующего устройства 6 в составе системы автоматического регулирования приведена на фиг.1. Нелинейное корректирующее устройство 6 содержит последовательно соединенные пиковый детектор 7, первый масштабирующий блок 8, первый сумматор 9 и сигнум-реле 10, выходом
5 подключенное к первому информационному входу переключателя 11, второй сумматор 13, соединенный первым входом с выходом второго масштабирующего блока 12, вторым входом со втоQ рым входом первого сумматора У, с информационными входом пикового детектора 7 и со входом нуль-органа 1Ь, а выходом - с управляющим входом переключателя 11, последовательно соединенные управляемый дифференциа0
5
0
5
тор 18, усилитель 19, первый блок / деления 20, ключ 21 и третий сумматор 24, второй вход которого соединен с выходом переключателя 11, а
10
111755255
выход является выходом устройства ,2, управляющий вход ключа 21 соединен с выходом нуль-органа 16, с управляющим входом пикового ч детектора 7 и с первым управляющим входом управляемого дифференциатора 18, информационный вход которого является первым входом устройства 22, а второй управляющий вход подключен к выходу сигнум- реле 10, выход пикового детектора 7 соединен со входом делитель первого блока деления 20 и со входом второго масштабирующего блока 12, информационный вход пикового детектора 7 является вторым входом устройства 23, последовательно соединенные дифференциатор И, второй блок деления Т5 и блок умножения 17, подключенный вторым входом к выходу дифференциатора 11, а выходом - ко второму информационному входу переключателя 11, вход делитель второго блока деления 15 соединен со входом дифференциатора Ik и с информационным входом пикового детектора 7 .
Устройство работает следующим образом.
Пиковый детектор 7 запоминает экстремальное значение сигнала рассогласования и € MJ формирует на своем выходе сигнал U7 Јм и хранит его до прихода сигнала на сброс с выхода нуль-органа 16. В блоках масштабирования 8 и 12 значение CHI нала V7 уменьшается соответственно в 2 и 20 раз и сравнивается в сумматорах 9 и 13 с текущим значением
12
режим апериодического движения в точке позиционирования (третий режим) при ,60,05 U. . В случае начального отрицательного значения сигнала рассогласования -1 (направление движения противоположное) пиковый детектор 7 запоминает отрицательное экстремальное значение
15
20
сигнала рассогласования и формирует на своем выходе сигнал -Uf -Ј„. Поэтому три режима работы устройства будут возникать в зависимости от следующих условий:
режим разгона при ,5Ur режим торможения при -0,05U.-U4& b-0,5Ur
режим апериодического движения в точке позиционирования при -и,ь-о,05и7, где Uf- сигнал рассогласования на
выходе измерителя рассогласования 1;
U7 - экстремальное значение сигнала рассогласования, зафиксированное пиковым детектором.
Для пояснения опишем работу НКУ только в положительном направлении 30 движения. Для противоположного
направления движения функции блоков не меняются.
По сигналу рассогласования сигнум-реле 10 выдает в первом режиме 35 на первый управляющий вход управляемого дифференциатора 18 положительный ступенчатый сигнал. Управляемый дифференциатор 18, при25
веденный на фиг.5, служит для выра- сигнала U4. Для такого преобразования 40 ботки сигнала производной от сигна- в блоках масштабирования 8 и 12 необ- ла задания G в зависимости от теку- ходимо выбрать предварительно коэф- щей ошибки системы и содержит резисторы 25 - 31, стабилитроны 32 и 33- RS-триггеры ЗА и 35, ключи 36 и 37, 45 конденсаторы 38 и 39, операционные усилители 40 - 2. общая шина 3 дифференциатор 4. Управляемый дифференциатор 18 работает в составе нелинейного корректирующего уст- 50 ройства следующим образом: сигнал U fЈ с выхода нуль-органа по R-вхо- дам сбрасывает Б нуль RS-триггеры З , и 35, выходные сигналы которых размыкают ключи 36 и 37. При срабатыва- 55 нии сигнум-реле 10, сигнал с его выхода U(0 поступает на ограничитель уровня, собранный на резисторе 27 и стабилитроне 32, а также на инвертирующий операционный усилитель
фициент передачи Kg первого масштабирующего блока 8 равным 0,5, что обеспечит необходимое положение линии переключения с режима разгона на режим торможения, а коэффициент передачи второго масштабирующего блока 12 равным 0,05, что обуславливает переход САР в третий режим с режима торможения.
В зависимости от результатов сравнения преобразованного в масштабирующих блоках значения сигнала U с текущим значением сигнала Uf воз- можны три режима работы устройства:
режим разгона при
режим торможения при О1,05U76Ui TO,5U7
5
12
режим апериодического движения в точке позиционирования (третий режим) при ,60,05 U. . В случае начального отрицательного значения сигнала рассогласования -1 (направление движения противоположное) пиковый детектор 7 запоминае отрицательное экстремальное значение
сигнала рассогласования и формирует на своем выходе сигнал -Uf -Ј„. Поэтому три режима работы устройства будут возникать в зависимости от следующих условий:
режим разгона при ,5Ur режим торможения при -0,05U.-U4& b-0,5Ur
режим апериодического движения в точке позиционирования при -и,ь-о,05и7, где Uf- сигнал рассогласования на
выходе измерителя рассогласования 1;
U7 - экстремальное значение сигнала рассогласования, зафиксированное пиковым детектором.
Для пояснения опишем работу НКУ только в положительном направлении движения. Для противоположного
направления движения функции блоков не меняются.
По сигналу рассогласования сигнум-реле 10 выдает в первом режиме на первый управляющий вход управляемого дифференциатора 18 положительный ступенчатый сигнал. Управляемый дифференциатор 18, при
По окончании переходного процесса нуль-орган 16 сигналомU ,, сбрасывает в ноль RS-триггеры 34 и 35, и ключи 36 и 37 размыкаются. Таким образом, описанная схема позволяет дифференцировать входной сигнал G в зависимости от полярности выходного напряжения сигнум-реле .
При перебросе сигнум-реле 10 на отрицательное напряжение на выходе дифференциатора 44 вырабатывается суммарный сигнал производных сигнало поступающих на каждый из его входов.
Производная от сигнала задания G, который поступил на второй вход дифференциатора 44, является инвертированной и удвоенной по отношению к производной от сигнала задания G, который поступил на первый вход дифференциатора 44. Таким образом, во втором режиме, когда сигнум-реле 10 формирует отрицательный ступенчатый сигнал U40-, -который, поступая на первый вход управляемого дифференциатора 18, позволяет сформировать на его выходе дополнительно к сигналу производной задания G первого режим удвоенное значение производной задан G с отрицательным знаком, т.е. в
момент переслючения сигнум-реле 10 выходной сигнал U(g равен U18 - -G , так как
( +(-2G ) - G ) И в первом, и во втором режиме сигнал производной задания соответственно G и G на выходе управляемого дифференциатора 18 усиливается усилителем 19 с коэффициентом усиления
КА
kli
кгде Тд, Тм, К,,, иц.
- соответственно электрохимичесэлектром.эгнитнат и кая постоянная времени, коэффициент усиления и максимально возможное ускорение двигателя 4 с нагрузкой.
Сигнал с выхода усилителя 19 затем поступает на вход делимое первого блока деления 20 и делится на величину экстремального значения сигнала запомненного в пиковом детекторе 7. Для входного сигнала типа скачок величина U7 очевидно равна G. Через замкнутый ключ 21, представляющий собой аналоговый ключ, управляемый нуль-органом 16, и служащий для предотвращения поступления помехи на суммирующее устройство 3 при отключении управляемого дифференциатора 1Ь, (ключ замкнут, так как сигнал с нуль-органа 16 отсутствует) выходной сигнал 12 поступает на третий сумматор 24, где суммируется с выходным сигналом переключателя 11, а затем на суммирующее устройство 3. На второй вход суммирующего устройства 3 подается выходной сигнал датчика скорости 5Третий режим возникает при подходе к точке позиционирования и характеризуется соотношением ( Ј 0,05UT , В этом режиме выходной сигнал второго сумматора становится отрицательным и переключатель 11 отсоединяет свой выход от BTdporo входа и подсоединяет его к первому входу, пропуская на свой выход сигнал 1 17с выхода блока умножения 17. Корректирующее устройство в этом случае обеспечивает апериодический процесс высокого качества без перерегулирования.
Отработка данного режима характеризуется заданной точностью пози
ционирования, которая не зависит от изменения параметров корректируемой системы в широком диапазоне. На фазовой, плоскости он соответствует прямой ВО (фиг.2) При ошибке системы, равной нулю, нуль-орган 16 сбрасывает в ноль пиковый детектор 7 и управляемый дифференциатор 18, а также кратковременно размыкает ключ 21 для предотвращения прохождения помехи в момент отключения управляемого дифференциатора 18.
Таким образом, предлагаемое уст10
дом - с вторым входом первого сумматора, с информационным входом пикового детектора и с входом нуль-органа, а выходом - с управляющим входом переключателя, последовательно соединенные управляемый дифференциатор, усилитель, первый блок деления, ключ и третий сумматор, второй вход которого соединен с выходом переключате-, ля, а выход является выходом устройства, управляющий вход ключа соединен с выходом нуль-органа, с управляющим входом пикового детектора и с
ройство позвбляет получить качествен- 15 первым управляющим входом управляемого дифференциатора, информационный вход которого является первым входом устройства, а второй управляющий вход подключен к выходу сигнум-реле, выход пикового детектора соединен с входом Делитель первого блока деления и с входом второго масштабирующего блока, информационные вход пикового детектора является вторым входом устройства, отличаюно новый режим подхода к точке позиционирования, обеспечивающий отсутствие перерегулирования и заданную точность, которая не зависит от изменения параметров корректируемой САР в широком диапазонео При этом «е требуется столь точной и сложной настройки как в базовом устройствес Это дает не только технический, но и экономический эффект,,
Формула изобретения
Нелинейное корректирующее устройсво, содержащее последовательно соединенные пиковый детектор, первый масштабируемый блок, первый сумматор и сигнум-реле, выходом подключенное к первому информационному входу переключателя, второй сумматор, соединенный первым входом с выходом второго масштабирующего блока, втооым вхопврзий
лмод
устр-ва
упрашшемыЯ усюпиен, первый олок „-„ 1 дифференциатор делття нчпч
«I
20
диффврен- Шатор
IfWKOBIlfl
детектор
второй йлок
ЛОЛиНШ
перши маоблокумножения
второй вход
устройства
дом - с вторым входом первого сумматора, с информационным входом пикового детектора и с входом нуль-органа, а выходом - с управляющим входом переключателя, последовательно соединенные управляемый дифференциатор, усилитель, первый блок деления, ключ и третий сумматор, второй вход которого соединен с выходом переключате-, ля, а выход является выходом устройства, управляющий вход ключа соединен с выходом нуль-органа, с управляющим входом пикового детектора и с
первым управляющим входом управляемо
го дифференциатора, информационный вход которого является первым входом устройства, а второй управляющий вход подключен к выходу сигнум-реле, выход пикового детектора соединен с входом Делитель первого блока деления и с входом второго масштабирующего блока, информационные вход пикового детектора является вторым входом устройства, отличаюшения точности устройства, в него дополнительно введены последовательно соединенные дифференциатор, второй блок деления и блок умножения, подключенный вторым входом к выходу дифференциатора, а выходом - к второму информационному входу переключателя, вход Делитель второго блока деления соединен с входом дифференциатора и с информационным входом пикового детектора.
1
nvumnvmtM ИОНОЛНЙТМЬЈЕЖ Й Двигатель Уогроиот о наглуэкой
//,
|2
третий сумматор lyoi-BS
датчик скорости
0, t
Фиг 2
Фиг 3
| Авторское свидетельство СССР № 915060, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
