(54) ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| Подъемник | 1978 |
|
SU695960A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| Подъемник-кантователь | 1990 |
|
SU1756265A2 |
| Привод подъемника | 1987 |
|
SU1585285A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ПОДЪЕМНИК | 1993 |
|
RU2081054C1 |
| Подъемник | 1978 |
|
SU931699A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к последовательному перемещению изделия по вертикали в процессе его сборки или изготовления.
Известны подъемники, содержащие перекрещивающиеся рычаги, с установленной на них грузовой платфоримой 1.
Однако такой подъемник не обеспечивает одновременного подъема грузов на несколько ярусов.
Наиболее близким из известных рещением является подъемник, содержащий перекрещивающиеся рычаги, образующие щарнирно-рычажную систему типа нюрнбергских ножниц и несущие расположенные ярусами грузовые платформы, привод подъема 2.
Однако наличие дополнительных опор усложняет конструкцию подъемника.
Цель изобретения - упрощение подъемника.
Для этого каждая из платформ щарнирно закреплена по оси симметрии рычажной системы.
Предлагаемый подъемник изображен «а чертеже.
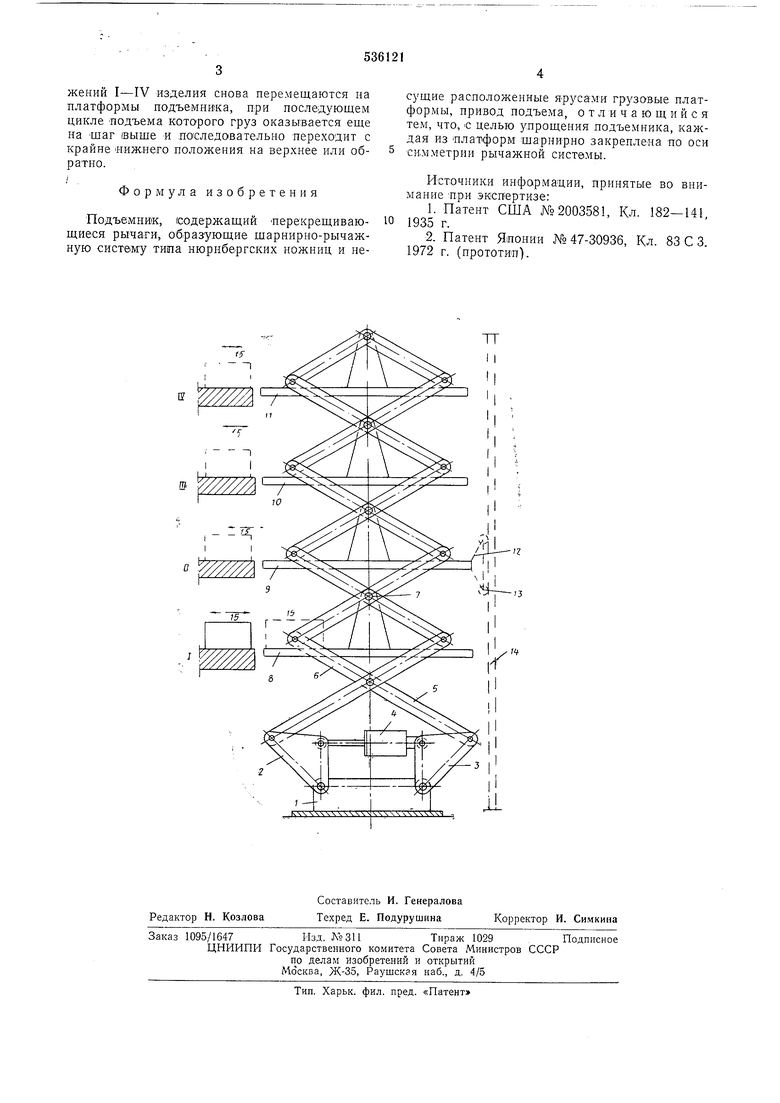
Подъемник содержит основание 1, на котором с помощью осей смонтированы поворотные кронштейны 2 и 3. Между кронщтейнами 2 и 3 размещен гидроцилиндр 4. Кронщтейны
2 и 3 соединены концами перекрещивающихся рычагов 5 и 6 рычажного многозвенника с осями 7, на которых установлены грузовые платформы 8-11.
Для предохранения платформ от самопроизвольного поворота в необходимых случаях могут быть установлены траверсы 12 с роликами 13, взалмодействующими с направляющим рельсом-ограничителем 14.
Подъемник работает сле1дующим образом.
С положения / груз 15 перемещается либо на тeлeЖiKe, либо другим способом на платформу 8 подъемника, затем при подаче давления в запоршневую полость гияроцилиндра 4 его щток перемещается внутрь гидроцилиндра, и кронщтейны 5 и 2 поворачиваются навстречу друг другу, сжимая концы рычагов 5 и 6. В результате этого происходит подъем в«ерх осей 7 с платформами на заданный шаг, и груз 15 оказывается с платформой 8 против положения II. Затем груз перемещается с платформы 8 и оказывается против положения П. Груз 15, находящийся на платформе 9, оказывается против положения ГП, а груз 15 на платформе 10 - против .положения IV.
Грузы с платформ 9 .и 10 также перемещаются на те положения, против которых они оказались. После этого щтак гидроцилиндра 4 совершает обратный ход и платформы опускаются вниз на заданный щаг. Затем с положений I-IV изделия снова перемещаются на платформы подъемника, при последующем цикле Подъема которого груз оказывается еще на шаг выше и лоследовательно переходит с крайне «иж.него положения на верхнее или обратпо.
Формула изобретения
Подъемник, (содержащий перекрещивающиеся рычаги, образующие щарнирно-рычажную систему типа нюрнбергских ножниц и не жш
сущие расположенные ярусами грузовые платформы, привод подъема, отличающийся тем, что, с целью упрощения подъемника, каждая из -платформ шарнирло закреплена по оси симметрии рычажной системы.
Источники информации, принятые во внимание при экспертизе:
